курс. Курс лекций по ТАУ. Лекция Принципы управления 2 Общие понятия 2 Лекция Статический режим сау 7
 Скачать 1.6 Mb. Скачать 1.6 Mb.
|

Лекция 14. Синтез САУ14.1. Синтез САУВ ТАУ можно выделить две характерные задачи: 1) в заданной САУ найти и оценить переходные процессы - это задача анализа САУ; 2) по заданным переходным процессам и основным показателям разработать САУ - это задача синтеза САУ. Вторая задача сложнее в виду своей неоднозначности, многое определяется творческими способностями проектировщика. Поэтому обычно задачу синтеза САУ ставится ограниченно. Считается, что основная часть системы уже задана, что обычно имеет место. Требуется синтезировать корректирующие звенья, то есть выбрать их схему и параметры. При этом необходимо, чтобы в результате коррекции САУ обеспечивался требуемый запас устойчивости; точность управления в установившихся режимах и качество управления в динамических режимах. 14.1.1. Включение корректирующих устройств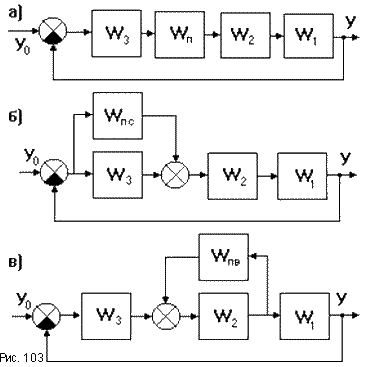 Корректирующее устройство можно включить последовательно, параллельно-согласно или параллельно-встречно (по схеме с обратной связью). Последовательное корректирующее устройство с передаточной функцией Wп включается обычно после предварительного усилителя. На рис.103а предварительный усилитель имеет передаточную функцию W3, выходной каскад усилителя - W2, исполнительный элемент - W1. Параллельно-согласное корректирующее устройство с передаточной функцией Wпс (рис.103б) может иногда при меньшей сложности обеспечить нужное преобразование сигнала. Например, для коррекции свойств САУ часто требуются дифференцирующие и форсирующие звенья, которые конструктивно очень сложны. В то же время параллельно-согласное включение предварительного усилителя (W3 = K3) и простого апериодического звена с передаточной функцией Wпс = позволяет реализовать функцию реального форсирующего звена. Такое соединение можно заменить эквивалентным форсирующим звеном с передаточной функцией Wф = W3 + Wпс =  , , где Tф1 =  ; Tф2 = Tпс; Kф = K3 + Kпс. ; Tф2 = Tпс; Kф = K3 + Kпс.Наибольшими возможностями в плане коррекции свойств САУ обладает корректирующее устройство с передаточной функцией Wпв, включенное по схеме с отрицательной или положительной обратной связью, охватывающей один из звеньев САУ, как правило исполнительный элемент или выходной каскад усилителя (усилитель мощности)(рис.103в). Такие обратные связи называются местными. При этом передаточная функция эквивалентного звена: Wэкв =  . . Обычно передаточную функцию выходного каскада усилителя W2 выбирают из условия |W2.Wпв| >> 1 в широком диапазоне частот, поэтому Wэкв 1/Wпв. То есть свойства участка цепи с параллельно-встречным включением корректирующего устройства определяются только свойствами данного корректирующего устройства. Это основное достоинство данного способа включения. Влияние плохих свойств какого либо необходимого для САУ звена, например, его нелинейности, могут быть практически полностью устранены. Местные корректирующие обратные связи делятся на жесткие и гибкие. Жесткая обратная связь действует на систему как в переходном, так и в установившемся режиме, то есть Wж(0) 0. Она реализуется безынерционным или инерционным звеном: Wж = Kж или Wж = . Гибкая обратная связь действует только в переходном режиме, она реализуется либо дифференцирующим, либо реальным дифференцирующим звеном: Wг = Kг pили Wг = . Например, если интегрирующее звено Wи = Kи/p охвачено жесткой обратной связью звеном Wж = Kж, то Wэкв =  , , где Kэкв = 1/Kж, Tэкв = 1/(Kи KэквKж). То есть жесткая обратная связь превращает интегрирующее звено в апериодическое. В случае гибкой обратной связи звеном Wг = Kгp получаем Wэкв =  , , где Kэкв =  . То есть гибкая обратная связь не изменяет структуру интегрирующего звена, но уменьшает его коэффициент передачи. . То есть гибкая обратная связь не изменяет структуру интегрирующего звена, но уменьшает его коэффициент передачи.Таким образом, даже простейшие обратные связи способны существенно изменить свойства типовых динамических звеньев. Еще больший эффект дают сложные отрицательные и положительные обратные связи. Если основные элементы регулятора по своей природе позволяют создать обратную связь, то динамические свойства этих элементов часто могут быть изменены в нужном направлении. 14.1.2. Синтез корректирующих устройств.Корректирующие устройства синтезируют на основании требований к свойствам САУ. Для этого необходимо знать передаточную функцию реальной САУ Wреал, которая чем то не удовлетворяет разработчика, и желаемую передаточную функцию Wжел , которой должна обладать САУ в результате корректировки ее свойств. При синтезе корректирующих устройств сначала определяю передаточную функцию возможного последовательного корректирующего устройства исходя из соотношения: Wп = Wжел /Wреал. Затем выясняют, при каких передаточных функциях параллельно-согласного Wпс и параллельно-встречного Wпв корректирующих устройств будет получен тот же эффект. После этого решают, какое из них более целесообразно и проще создать. При этом исходя из рис.103 можно записать: Wжел = W Wп = W1 W2.(W3 + Wпс) = W (1 + Wпс/W3) = W/(1 + W2 Wпв), где W = W1 W2 W3. Из этого соотношения можно определить формулы перехода от одного корректирующего устройства к другому. |