исследование сау. Отчет по лабораторной работе 2 "Характеристики типовых корректирующих устройств"
 Скачать 287.93 Kb. Скачать 287.93 Kb.
|

|
Нижегородский Государственный Технический Университет Имени Р.Е.Алексеева Кафедра “Электрооборудование, электропривод и автоматика” Отчет по лабораторной работе №2 “Характеристики типовых корректирующих устройств” Выполнил: Ежов Д.И. Проверил: Мельников В.Л. Нижний Новгород 2022 г. Цель:теоретическое и экспериментальное определение иисследование характеристики типовых корректирующих устройств. Программа работы: 1. Получить выражения передаточных функций корректирующих устройств при различных вариантах реализации. 2. Получить аналитические выражения переходных и частотных характеристик. 3. Разработать модели КУ в среде SamSim. Получить графики переходных и частотных характеристик (  4. С использованием модели в среде SamSim исследовать влияние гибкой обратной связи на переходные процессы колебательного звена. 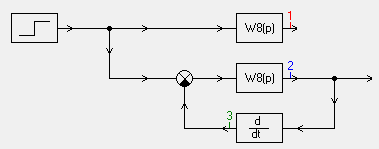
1.1 Передаточная функция:  1.2 Переходная характеристика:  Частотные характеристики:   1.3 Модель, выполненная в SamSim:  График переходной характеристики: 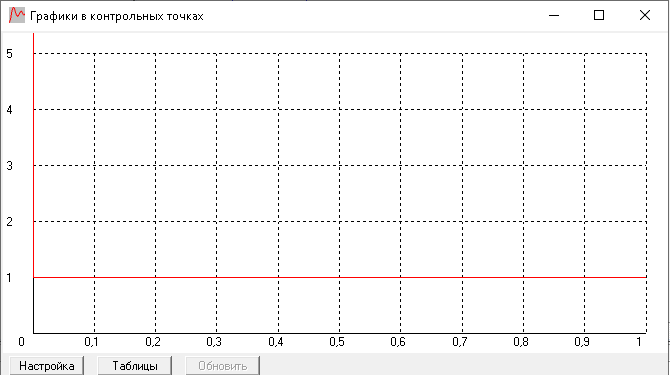 Годограф: 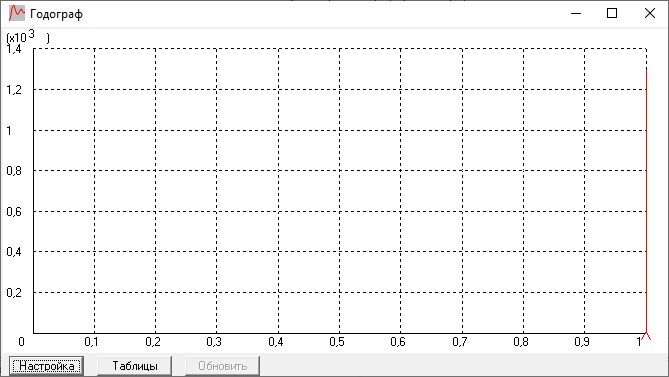 ЛАЧХ и ЛФЧХ: 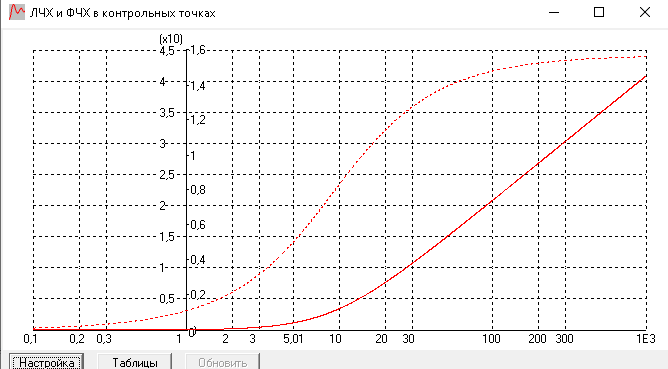 Вывод: рассчитанная переходная характеристика совпадает с полученной экспериментально. ЛАЧХ совпадает с осью на низких частотах, и имеет наклон +20дб/дек при  . Годограф также соответствует ожидаемым результатам, берет начало из точки +1, и идет перпендикулярно вверх, из-за форсирующего звена. . Годограф также соответствует ожидаемым результатам, берет начало из точки +1, и идет перпендикулярно вверх, из-за форсирующего звена.2.1 Тип – пропорционально-дифференциальное корректирующее устройство (пассивное). Примеры схем реализации: - ПД-регулятор 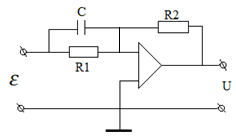 Передаточная характеристика:  - Пассивный R-C контур 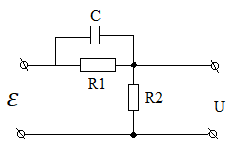 Передаточная функция:  , где , где – коэффициент ослабления – коэффициент ослабления2.2 Переходная характеристика:  Частотные характеристики:   2.3 Модель, выполненная в SamSim:  График переходной характеристики: 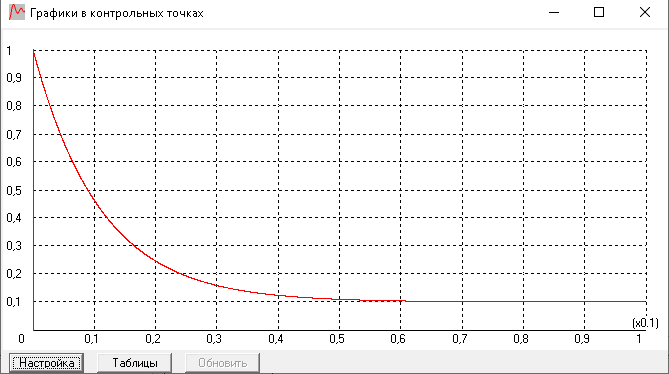 Годограф: 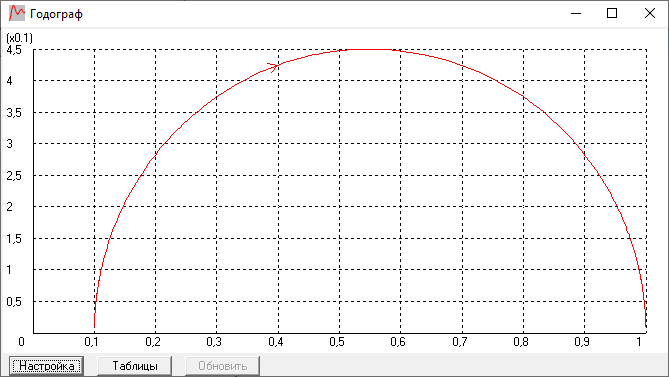 ЛАЧХ и ЛФЧХ: 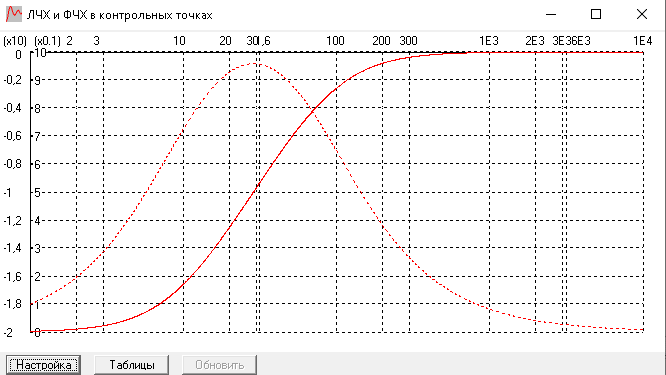 Вывод: рассчитанная переходная характеристика совпадает с полученной экспериментально. ЛАЧХ берет начало из точки  , и имеет наклон +20 дб/дек при а затем , и имеет наклон +20 дб/дек при а затем  имеет наклон 0 дб/дек. Годограф также соответствует ожидаемым результатам, имеет форму полуокружности из-за последовательно соединённых инерционного и форсирующего звеньев, причем T форсирующего > T инерционного. имеет наклон 0 дб/дек. Годограф также соответствует ожидаемым результатам, имеет форму полуокружности из-за последовательно соединённых инерционного и форсирующего звеньев, причем T форсирующего > T инерционного.3.1 Тип – пропорционально-интегральное корректирующее устройство Передаточнаяфункция:  3.2 Переходная характеристика:  Частотные характеристики:   3.3 Модель, выполненная в SamSim:  График переходной характеристики: 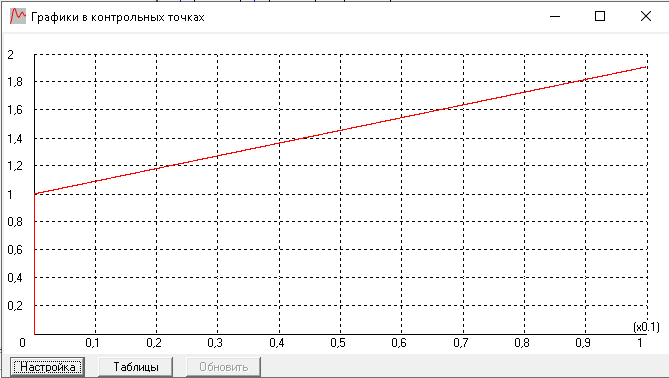 Годограф: 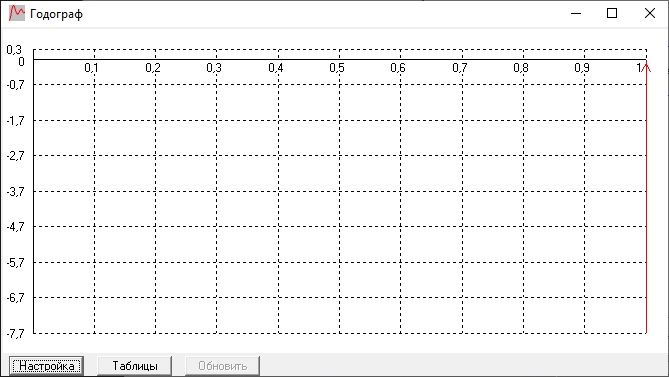 ЛАЧХ и ЛФЧХ: 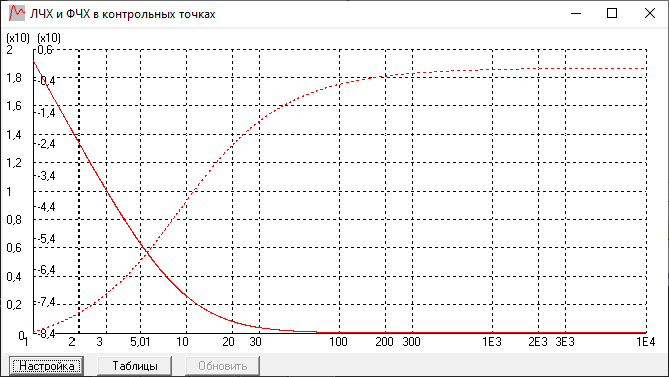 Вывод: рассчитанная переходная характеристика совпадает с полученной экспериментально. ЛАЧХ берет начало из точки  , и имеет наклон -20 дб/дек на низких частотах, а затем при имеет наклон 0 дб/дек. Годограф также соответствует ожидаемым результатам, берет начало в IV четверти координатной плоскости, и идет перпендикулярно вверх, из-за форсирующего звена, к точке +1. , и имеет наклон -20 дб/дек на низких частотах, а затем при имеет наклон 0 дб/дек. Годограф также соответствует ожидаемым результатам, берет начало в IV четверти координатной плоскости, и идет перпендикулярно вверх, из-за форсирующего звена, к точке +1.4.1 Тип – пропорционально-интегральное корректирующее устройство Примеры схем реализации: - 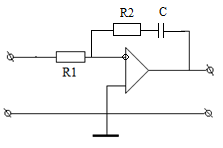 ПИ-регулятор ПИ-регуляторПередаточная характеристика:  - 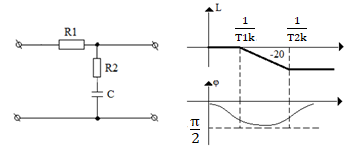 Пассивный R-C контур Пассивный R-C контурПередаточная характеристика:  (p) = (p) = , где Т1> Т2 , где Т1> Т24.2 Переходная характеристика:  Частотные характеристики:   4.3 Модель, выполненная в SamSim:  График переходной характеристики: 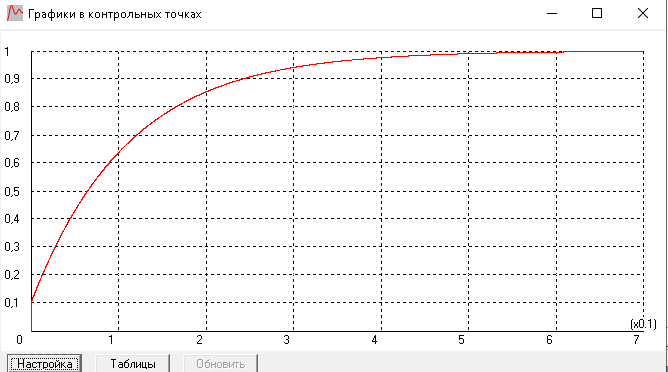 Годограф: 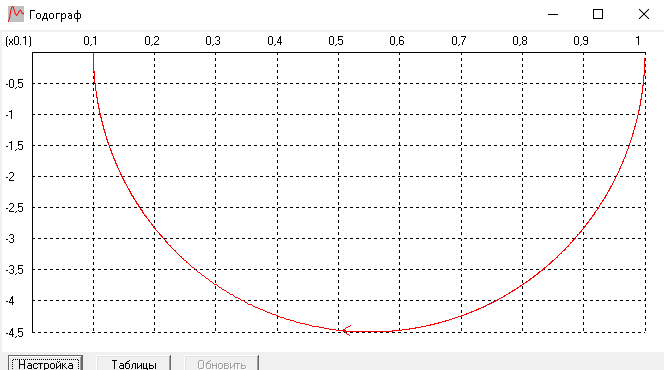 ЛАЧХ и ЛФЧХ: 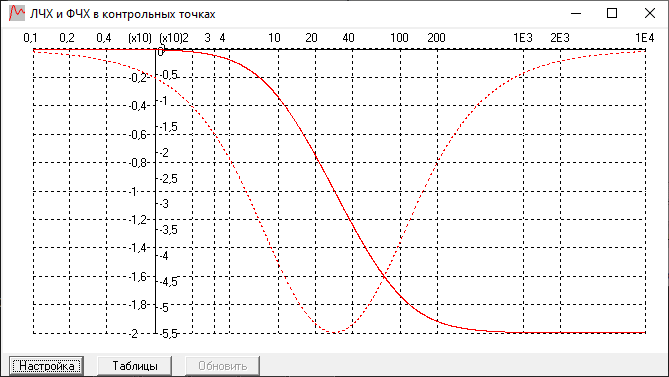 Вывод: рассчитанная переходная характеристика совпадает с полученной экспериментально. Изначально ЛАЧХ совпадает с осью, затем имеет наклон  дб/дек при дб/дек при  а после при а после при  имеет наклон 0 дб/дек. Годограф также соответствует ожидаемым результатам, имеет форму полуокружности из-за последовательно соединённых инерционного и форсирующего звеньев, причем Tинерционного> T форсирующего. имеет наклон 0 дб/дек. Годограф также соответствует ожидаемым результатам, имеет форму полуокружности из-за последовательно соединённых инерционного и форсирующего звеньев, причем Tинерционного> T форсирующего.5.1 Тип – пропорционально-интегрально-дифференциальный регулятор Передаточнаяфункция:  5.2 Переходная характеристика:  Частотные характеристики:   5.3 Модель, выполненная в SamSim: График переходной характеристики:  Годограф: 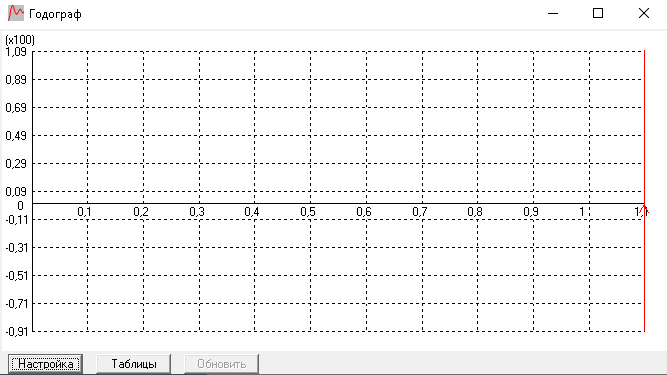 ЛАЧХ и ЛФЧХ: 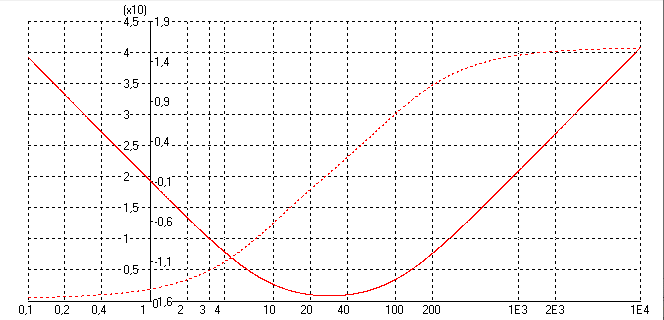 Вывод: рассчитанная переходная характеристика совпадает с полученной экспериментально. ЛАЧХ берет начало из точки  , и имеет наклон -20 дб/дек на низких частотах, а затем при имеет наклон 0 дб/дек., а после при имеет наклон +20дб/дек. Годограф также соответствует ожидаемым результатам, берет начало в IVчетверти координатной плоскости, и идет перпендикулярно вверх, из-за форсирующего звена. И из-за второго форсирующего звена поднимается выше в Iчетверть. , и имеет наклон -20 дб/дек на низких частотах, а затем при имеет наклон 0 дб/дек., а после при имеет наклон +20дб/дек. Годограф также соответствует ожидаемым результатам, берет начало в IVчетверти координатной плоскости, и идет перпендикулярно вверх, из-за форсирующего звена. И из-за второго форсирующего звена поднимается выше в Iчетверть. 6. Исследование влияния гибкой обратной связи на переходные процессы колебательного звена. Возьмем колебательное звено второго порядка с передаточной функцией:  С параметрами: k = 1; T = 0.1; d = 0.25 А также дифференцирующее звено в цепи обратной связи:  Модель, выполненная в SamSim: 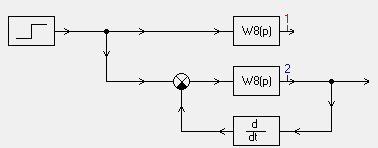 При T1 = 0.1 имеем график: 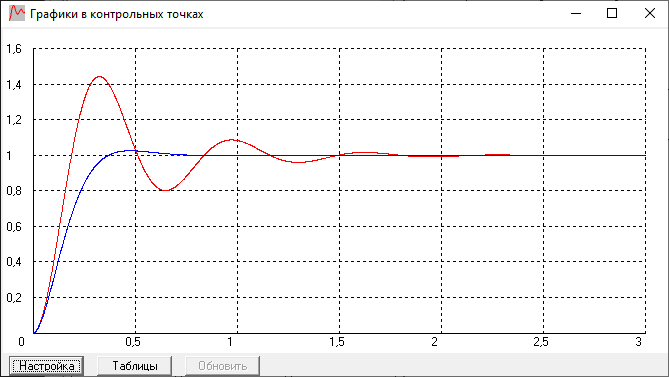 При T1 = 0.05имеем график: 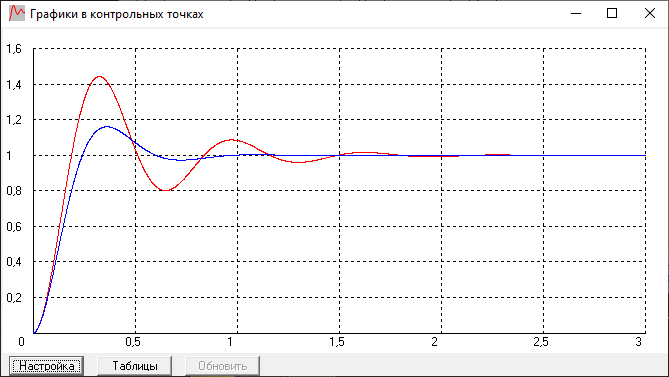 При T1 = 0.2 имеем график: 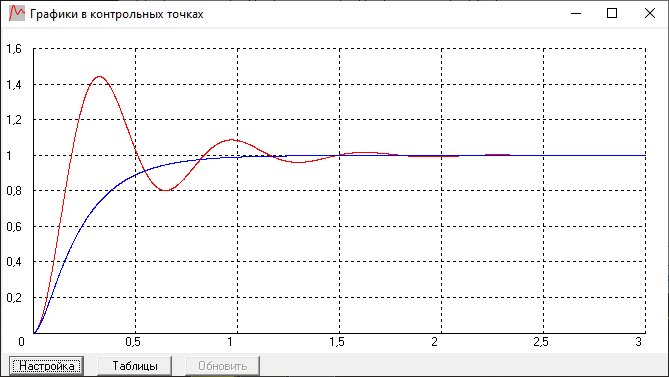 Вывод: Оптимальный коэффициент для дифференцирующего звена в цепи обратной связи это T1 = 0,1 так как при меньшем значении T1 колебания составляют больше чем 4% от величины входного сигнала, а при большем значенииT1 мы получаем «вялый» график, который слишком медленно приходит к установившемуся значению. |