Научная статья. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ПРОЦЕССА РАБОТЫ КОНУСНОГО РАСКАТЧИКА. Математическая модель процесса работы конусного раскатчика
 Скачать 0.98 Mb. Скачать 0.98 Mb.
|

|
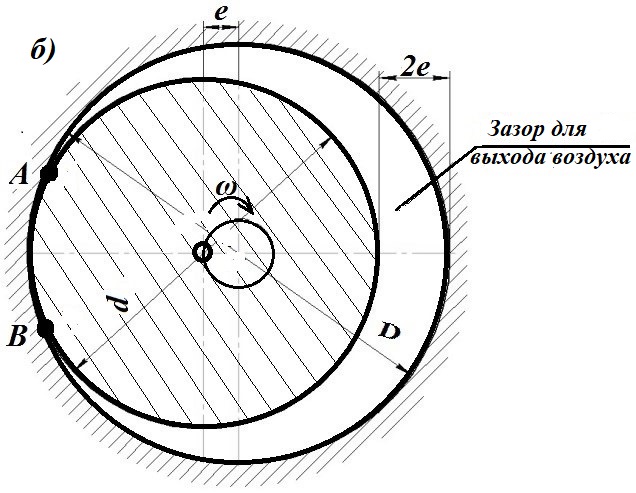
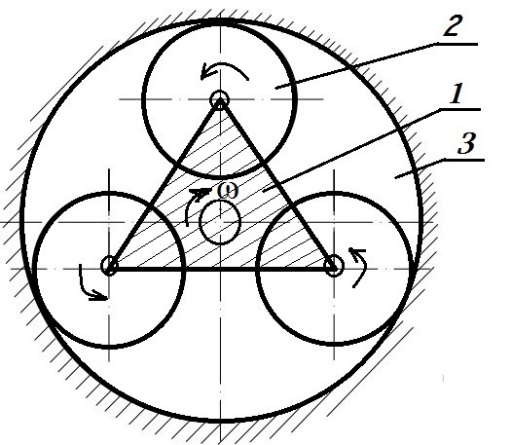
УДК 624.04 (075) МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ПРОЦЕССА РАБОТЫ КОНУСНОГО РАСКАТЧИКА К.З. Тиллоев Южно-Уральский государственный университет, г. Челябинск, Россия MATHEMATICAL MODEL OF THE WORKING PROCESS OF CONE ROLLING K. Z. Tilloev South Ural State University, Chelyabinsk, Russian Federation Выбор типа конструкции уплотняющих машин зависит от многих факторов: вида уплотняемого материала (грунт, щебень, гравий, шлак, скальные крупнообломочные грунты, асфальтобетон, бетон); состояние грунта (оптимальной влажности, переувлажненные, водонасыщение, насыпные, просадочные); толщины уплотняемых слоев (послойное уплотнение тонкими слоями, уплотнение сразу на всю толщину отсыпки до проектной отметки) и условий работы машины (стесненные условия, широкий фронт работ). В статье представлена конструкция агрегата для глубинного трамбования грунта, разработанная специалистами института гидродинамики «Сибирское отделение российской академия наук» (СО РАН) и его конструкторско-технологического филиала. На основе оценки достоинств и недостатков агрегата для глубинного трамбования грунта предложено новое техническое решение на основе конусного раскатчика, обеспечивающее более благоприятные условия для удаления воздуха из массива уплотняемого материала. Представлена математическая модель конусного раскатчика с использованием метода разложения периодической функции в ряд Фурье, с помощью который определилось постоянная сила и сумма гармонических сил в процессе работы конусного рабочего органа. Главным рабочим органом машины для конусной раскатки грунтовых оснований автомобильных дорог являются катки с переменным диаметром по высоте. При качении рабочий орган воздействует на уплотняемую поверхность в узкой зоне, в центре которой сжимающее усилие будет максимальным, а по краям уплотняющей зоны оно уменьшается до нуля. Рассмотрены конструкции физической модели конусного раскатчика в виде одного катка и самоцентрирующийся рабочий орган с несколькими катками. Ключевые слова: уплотнение материалов, устройство для уплотнения, глубинное трамбование, конусный раскатчик, прецессирующий вал. The choice of the design type of sealing machines depends on many factors: the type of compacted material (soil, crushed stone, gravel, slag, rock coarse soils, asphalt concrete, concrete); the state of the soil (optimal humidity, waterlogged, watering, bulk, subsidence); the thickness of the compacted layers (layer-by-layer compaction thin layers, compaction immediately to the entire thickness of the filling to the design mark) and the working conditions of the machine (cramped working conditions, a wide range of works). The article presents the design of the unit for deep soil compaction developed by the specialists of the Institute of hydrodynamics "Siberian branch of the Russian Academy of Sciences" (SB RAS) and its design and technological branch. Based on the assessment of the advantages and disadvantages of the unit for deep compaction of the soil, a new technical solution based on a cone unroller is proposed, which provides more favorable conditions for removing air from the massif of the compaction material. A mathematical model of the cone unroller using the method of decomposition of the periodic function in the Fourier series, which determined the constant force and the sum of harmonic forces in the operation of the cone working body. The main working body of the machine for cone rolling of soil bases of roads are rollers with variable diameter in height. When rolling, the working body acts on the sealing surface in a narrow zone, in the center of which the compressive force will be maximum, and at the edges of the sealing zone it decreases to zero. The design of a physical model of a cone unroller in the form of a single roller and a self-centering working body with several rollers are considered. Keywords: sealing materials, compaction, deep compaction, cone rascati, precancerosis shaft. Насыпные дорожно-строительные материалы и просадочные грунты перед возведением на них сооружений подлежат искусственному уплотнению. Уплотняющие машины различаются по следующим основным методам уплотнения: укатка (рабочий орган – уплотняющий каток перемешается по поверхности уплотняемого материала); трамбование – ударное воздействие достигается периодическими ударами рабочей плиты по уплотняемому материалу; вибрационное воздействие (материалу сообщают кратковременные, следующие один за другим импульсы). Относительным недостатком дорожных машин для уплотнения дорожно-строительные материалов является небольшая высота отсыпаемых слоев грунта 0,3–0,8 м. Более высокие земляные сооружения (насыпи, дамбы, плотины и т.д.) приходится изготавливать многослойными, что приводит к неоднородности уплотнения грунтов и, как следствие, к последующим деформациям от внешних нагрузок [1–11]. Для больших объемов земляных работ (высота насыпи и их протяженность) требуется более современная техника и технология уплотнения грунтов. Специалистами института гидродинамики «Сибирское отделение российской академия наук» (СО РАН) и его конструкторско-технологического филиала разработан и применяется агрегат для глубокого трамбования грунта (рис. 1 а, б), который раздвигает грунт в горизонтальном направлении, образуя конический котлован. В образовавшиеся котлованы засыпаются более прочные материалы (рекомендуется щебень, песок и т.д.), которые дополнительно уплотняются дорожными катками (виброкатками). В результате использования агрегата для глубокого трамбования грунта и проведённых исследований плотность грунта повышается на 20-30% и в 2-3 раза увеличивается его несущая способность [12]. Экономический эффект от использований нового агрегата при строительстве 9-этажного жилого дома составляет 810,4тыс. рублей [12].   а) б) Рис. 1. Агрегат для глубинного трамбования грунта а) рабочая положения, б) положения простоя Относительным недостатком агрегата для глубокого трамбования грунта является большая контактная поверхность рабочего органа с грунтом. Контактная поверхность рабочего органа при диаметре основания конусной оболочки, внедряемой в грунт, равной 0,9 м, и высоте конуса 3 м достигает 6 м2, что требует больших затрат мощности для раздвижки грунта в горизонтальном направлении при работе гидро-пневматического молота. Конусная оболочка рабочего органа агрегата герметизирует пространство вокруг боковой поверхности конуса, поэтому воздух движется во внутрь массива грунта при внедрении оболочки. Такая технология является «воздухозащемляющей». Сотрудники Южно-уральского государственного университета (ЮУрГУ) предлагают усовершенствовать технику глубинного уплотнения методом раскатки котлована рабочим органом в виде конического катка [13]. Главное преимущество предложенного метода состоит в уменьшении площади контакта рабочего органа с грунтом в несколько раз, потому что длина дуги  во много раз меньше длины окружности рабочего органа агрегата для глубинного трамбования грунта (рис. 2 б). во много раз меньше длины окружности рабочего органа агрегата для глубинного трамбования грунта (рис. 2 б).В процессе работы предлагаемого рабочего органа создаются условия для непрерывного удаления воздуха из грунтовой массы за счет наличия зазоров между рабочим органом и образовавшимся котлована. Эту технологию мы назвали «воздухоудаляющей».
Рис. 2. Схема конусной раскатки котлована, а) – вид сбоку б) - вид сверху 1-прецесирующий вал, 2-рабочий орган, 3-котлован 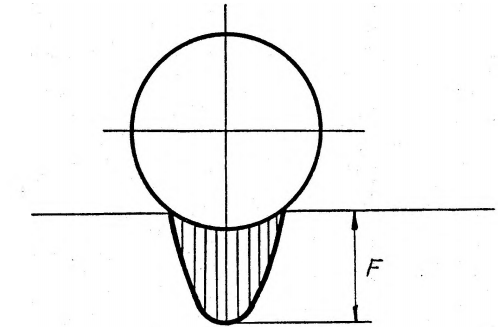 Рабочим органом нового устройства является конус 2 с углом φ при вершине (точка О) Рабочим органом нового устройства является конус 2 с углом φ при вершине (точка О) . Ведущим звеном конусного рабочего органа является коленчатый вал (прецессирующий вал) 1, который связан с приводом вращения (привод на рис. 2 условно не показан). Участки коленчатого вала расположены под углом . Ведущим звеном конусного рабочего органа является коленчатый вал (прецессирующий вал) 1, который связан с приводом вращения (привод на рис. 2 условно не показан). Участки коленчатого вала расположены под углом друг к другу и пересекаются в точке (О), совпадающей с вершиной конуса 2. При вращении коленчатого вала 1 и воздействия осевой нагрузки друг к другу и пересекаются в точке (О), совпадающей с вершиной конуса 2. При вращении коленчатого вала 1 и воздействия осевой нагрузки , конус 2 вдавливается в массив грунта, совершая обкатывание внутри вырабатываемого котлована 3. , конус 2 вдавливается в массив грунта, совершая обкатывание внутри вырабатываемого котлована 3. Основным рабочим органом машин для конусной раскатки дорожно-строительных материалов являются катки с переменным диаметром по высоте. При качении катка он воздействует на уплотняемую поверхность в узкой зоне, в центре которой сжимающее усилие F будет максимальным, а по краям этой зоны оно уменьшается до нуля. График изменения усилия под катком в первом приближении имеет вид половины синусоиды (рис. 3) [14–16]. Рис. 3. Схема уплотнения грунта гладким металлическим вальцом При движении каток периодически прокатывается через одно и то же место с частотой  (и с угловой частотой (и с угловой частотой ). Зависимость изменения усилия от времени в этом случае представлена на рис.4. ). Зависимость изменения усилия от времени в этом случае представлена на рис.4.  Рис. 4. График зависимости изменения усилия от времени при укатывании катка На этой рисунке закон изменения усилия  имеет вид импульсов продолжительностью имеет вид импульсов продолжительностью с максимальным значением с максимальным значением  и с периодом и с периодом (Рис. 4). (Рис. 4).Аналитически функцию можно записать следующим образом:  (1) (1)Разложим функцию в ряд Фурье: (2) (2)где  (3) (3)Представим интеграл в формуле (3) в виде суммы интегралов:  (4) (4)Здесь учтено, что  в промежутках между импульсами. Подставив представление по формулам (1) в (4) и проведя соответствующие вычисления, получим выражение, для вычисления коэффициентов в промежутках между импульсами. Подставив представление по формулам (1) в (4) и проведя соответствующие вычисления, получим выражение, для вычисления коэффициентов : : (5) (5) (6) (6)Таким образом, если при укатывании каток периодически прокатывается через одно и то же место с частотой  , то это равносильно тому, что на "это место" действует постоянная сила (5) и сумма гармонических сил с амплитудами (6). , то это равносильно тому, что на "это место" действует постоянная сила (5) и сумма гармонических сил с амплитудами (6).Следовательно, периодическое укатывание катком обладает тем преимуществом, что, во-первых, воздействует на малую площадь укатываемого материала, а во-вторых, воздействует на этот материал при помощи поличастотной вибрации, которая, как известно, уменьшает внешнее и внутреннее трение в материале [17–19]. Конструкция нового рабочего органа может быть выполнена в виде одного конического катка (рис. 2), либо в виде нескольких катков (рис. 5), что значительно упрощает динамическое уравновешение механической системы. Новые рабочие органы могут быть установлены на экскаваторах вместо ковшей (рис.6) или на буровых машинах.
Обкатка коническим катком эквивалентна действию статической нагрузки в виде силы сжатия и вибрационного воздействия на уплотняемый грунт. Как показывает опыт новосибирских исследователей [12], эффективная зона уплотнения грунта в горизонтальном направлении составляет около двух радиусов внедряемого рабочего органа в виде конуса, поэтому межцентровое расстояние между соседними котлованами может быть равно двум диаметрам основания конусного рабочего органа. Ранее было показана что мощность привода раскатчика определяется зависимостью [20].  где М - Требуемый крутящий момент, ω- угловая скорость, n- число оборотов коленчатого вала (водила) в минуту.  где Q- внешняя сила, приложенная к вертикальной оси, водила, E- модуль упругости уплотняемого материала, σ- коэффициент Пуассона, α- угол оси прецессирующего вала Заключение Предложена конструкция нового рабочего органа экскаватора, отличающаяся от известного агрегата для глубокого трамбования грунта (г. Новосибирск) значительно меньшей контактной поверхностью и создающая условия для непрерывного выхода воздуха из массива грунта. Раскатчик котлована обладает тем преимуществом что, во-первых, воздействует на малую площадь укатываемого материала, а во-вторых, воздействует на этот материал при помощи поличастотной вибрации, которая, как указано выше, уменьшает внешнее и внутреннее трение в материале. Рабочий орган в виде конического раскатчика может быть установлен на дорожно-строительные машины, например, на базе серийно выпускаемых гидравлических экскаваторов или буровых машин меньшей общей массы и меньшей установленной мощностью. Литературы В. И. Баловнев, С. Н. Иванченко, Р. Г. Данилов, А. В. Дорожные катки: развитие, конструкция, расчет: учебное пособие /под общ. ред. В. И. Баловнева, Иванченко С.Н. - Хабаровск: ТОГУ, 2016. – 215 с. Минаев О. П. Основы и методы уплотнения грунтов оснований для возведения зданий и сооружений /г. С. Петербург 2014-295с. Луцкий, С.Я., Сакун А.Б. Интенсивная технология упрочнения слабых оснований земляного полотна. //Транспортное строительство №08/2015. – С. 18–22. Skrypchenko O., Katerina K., Tetiana K., Bieliatynskyi A. Method of increasing the roughness of the existing road. / 15th International scientific conference “Underground Urbanisation as a Prerequisite for Sustainable Development” 165 (2016) 1766 – 1770, doi: 10.1016/j.proeng.2016.11.920. Holger P., Marco B., Alexander K., Matteo B., Ralf T. Dynamic soil compaction–recent methods and research tools for innovative heavy equipment approache”, / The 5th International Conference of Euro Asia Civil Engineering Forum (EACEF-5) 125 ( 2015 ) 390 – 396 doi: 10.1016/j.proeng.2015.11.096 Minaev, O.P. Russian methods and equipment for spatial vibrocompaction foundations and structures (2015) 15th Asian Regional Conference on Soil Mechanics and Geotechnical Engineering, ARC 2015: New Innovations and Sustainability, pp. 2747-2750. doi: 10.3208/jgssp.TC305-11 Sergei N., Viktor K., Sergei R., Sergei M. Methodology of ensuring road traffic safety with respect to road-building materials compaction efficiency factor / 12th International Conference "Organization and Traffic Safety Management in Large Cities", SPbOTSIC-2016, 28-30 doi: 10.1016/j.trpro.2017.01.073 8. Massarsch, K.R. and Fellenius, B.H., 2005. Deep vibratory compaction of granular soils. /Chapter 19 in Ground Improvement-Case Histories, Elsevier publishers, B. Indranatna and C. Jian, Editors, pp. 633 - 658. Beckett, C.T.S., Bewsher, S., Guzzomi, A.L., Lehane, B.M., Fourie, A.B., Riethmuller, G. Evaluation of the dynamic cone penetrometer to detect compaction in ripped soils(2018) Soil and Tillage Research, 175, pp. 150-157. doi: 10.1016/j.still.2017.09.009. Барац Н.И. Механика грунтов: /Учебное пособие. – //Омск: Изд-во СибАДИ, 2008. –106 с. Криворотов А.П., Лубягин А.В, Эффективность уплотнения слабых грунтов методом раскатки скважин. / Изв. вузов строительство 2006 №5- 59-65 с. Миронов В.С. Технология и оборудование для глубокого трамбованные грунта / В.С. Миронов, П.Я. Фадеев. В.Я. Фадеев, М.С. Мандрик // Строительные и дорожные машины. – 2015 – № 8 – С.2–4. Пат. № 161212 Российская Федерация. Устройство для раскатки котлованов/ Е.И. Кромский, Д.Р. Каюпов, А.С. Гладченко заявитель и патентообладатель Е.И. Кромский, Д.Р. Каюпов, А.С. Гладченко № 2015141387 заявл. 29.09.2015; опубл. 10.04.2016, Бюл. № 10. – 5 с. Блехман И.И. Что может вибрация?: /О «вибрационной механике» и вибрационной технике – М.: Наука. //Гл. ред. Физ-мат. Лит., 1988. – 208 с – ISBN 5-02-013808-8 Lynessa L., Edwin I. E., Anika T., Robert B. Evaluation of a machine to determine maximum bulk density of soils using the vibratory method. / Biosystems Engineering Vol. 178, 2019, P 109-117 doi.org/10.1016/j.biosystemseng.2018.11.006 Heins, E., Seitz, K.-F., Chmelnizkij, A., Milatz, M., Grabe, J. Advances in numerical modelling of different ground improvement techniques (2017) Geotechnical Engineering, 48 (3), pp. 87-94. ISSN: 00465828. Болдырев Г.Г. Методы определения механических свойств грунтов. Состояние во Aпроса [Текст]: монография / Г.Г. Болдырев. – Пенза: ПГУАС, 2008. – 696 с Baidya, D. K. and Murali Krishna, G., “Investigation of Resonant Frequency and Amplitude of Vibrating Footing Resting on a Layered Soil System,” /Geotechnical Testing Journal, Vol. 24, No. 4, 2001, pp. 409–417 Кромский, Е.И. Новое сменное оборудование гидравлического экскаватора / Е.И. Кромский, С.В. Кондаков, К.З. Тиллоев, Кадырова Х.И. // Политехнический вестник. Серия «Инженерные исследования». – 2018. –№3 (43) – 2018 –С.50-54. References 1. V. I. Balovnev, S. N. Ivanchenko, R. G. Danilov, A. V. Dorozhnye katki: razvitie, kon-strukciya, raschet: uchebnoe posobie /pod obshch. red. V. I. Balovneva, Ivanchenko S.N. - Haba-rovsk: TOGU, 2016. – 215 s. 2. Minaev O. P. Osnovy i metody uplotneniya gruntov osnovanij dlya vozvede-niya zdanij i sooruzhenij /g. S. Peterburg 2014-295s. 3. Luckij, S.YA., Sakun A.B. Intensivnaya tekhnologiya uprochneniya slabyh osno-vanij zemlyanogo polotna. //Transportnoe stroitel'stvo №08/2015. – S. 18–22. 4. Skrypchenko O., Katerina K., Tetiana K., Bieliatynskyi A. Method of increasing the roughness of the existing road. / 15th International scientific conference “Underground Urbanisa-tion as a Prerequisite for Sustainable Development” 165 (2016) 1766 – 1770, doi: 10.1016/j.proeng.2016.11.920. 5. Holger P., Marco B., Alexander K., Matteo B., Ralf T. Dynamic soil compaction–recent methods and research tools for innovative heavy equipment approache”, / The 5th International Conference of Euro Asia Civil Engineering Forum (EACEF-5) 125 ( 2015 ) 390 – 396 doi: 10.1016/j.proeng.2015.11.096 6. Minaev, O.P. Russian methods and equipment for spatial vibrocompaction foundations and structures (2015) 15th Asian Regional Conference on Soil Mechanics and Geotechnical Engi-neering, ARC 2015: New Innovations and Sustainability, pp. 2747-2750. doi: 10.3208/jgssp.TC305-11 7. Sergei N., Viktor K., Sergei R., Sergei M. Methodology of ensuring road traffic safety with respect to road-building materials compaction efficiency factor / 12th International Conference "Organization and Traffic Safety Management in Large Cities", SPbOTSIC-2016, 28-30 doi: 10.1016/j.trpro.2017.01.073 8. Massarsch, K.R. and Fellenius, B.H., 2005. Deep vibratory compaction of granular soils. /Chapter 19 in Ground Improvement-Case Histories, Elsevier publishers, B. Indranatna and C. Jian, Editors, pp. 633 - 658. 9. Beckett, C.T.S., Bewsher, S., Guzzomi, A.L., Lehane, B.M., Fourie, A.B., Riethmuller, G. Evaluation of the dynamic cone penetrometer to detect compaction in ripped soils (2018) Soil and Tillage Research, 175, pp. 150-157. doi: 10.1016/j.still.2017.09.009. 10. Barac N.I. Mekhanika gruntov: /Uchebnoe posobie. – //Omsk: Izd-vo SibADI, 2008. –106 s. 11. Krivorotov A.P., Lubyagin A.V, EHffektivnost' uplotneniya slabyh gruntov metodom raskatki skvazhin. / Izv. vuzov stroitel'stvo 2006 №5- 59-65 s. 12. Mironov V.S. Tekhnologiya i oborudovanie dlya glubokogo trambovannye grunta / V.S. Mironov, P.YA. Fadeev. V.YA. Fadeev, M.S. Mandrik // Stroitel'nye i dorozhnye mashiny. – 2015.– № 8.– S.2–4. 13. Pat. № 161212 Rossijskaya Federaciya. Ustrojstvo dlya raskatki kotlovanov/ E.I. Kromskij, D.R. Kayupov, A.S. Gladchenko zayavitel' i patentoobladatel' E.I. Kromskij, D.R. Kayupov, A.S. Gladchenko № 2015141387 zayavl. 29.09.2015; opubl. 10.04.2016, Byul. № 10. – 5 s. 14. Blekhman I.I. CHto mozhet vibraciya?: /O «vibracionnoj mekhanike» i vibracionnoj tekhnike – M.: Nauka. //Gl. red. Fiz-mat. Lit., 1988. – 208 s – ISBN 5-02-013808-8 15. Lynessa L., Edwin I. E., Anika T., Robert B. Evaluation of a machine to determine maximum bulk density of soils using the vibratory method. (2019). Biosystems Engineering Vol. 178, 2019, P 109-117 doi.org/10.1016/j.biosystemseng.2018.11.006 16. Heins, E., Seitz, K.-F., Chmelnizkij, A., Milatz, M., Grabe, J. Advances in numerical modelling of different ground improvement techniques (2017) Geotechnical Engineering, 48 (3), pp. 87-94. ISSN: 00465828. 17. Boldyrev G.G. Metody opredeleniya mekhanicheskih svojstv gruntov. Sostoyanie vo Aprosa [Tekst]: monografiya / G.G. Boldyrev. – Penza: PGUAS, 2008. – 696 s 18. Baidya, D. K. and Murali Krishna, G., “Investigation of Resonant Frequency and Amplitude of Vibrating Footing Resting on a Layered Soil System,” /Geotechnical Testing Journal, Vol. 24, No. 4, 2001, pp. 409–417 19. Th.Triantafyllidis, I. Kimmig A simplified model for vibro compaction of granular soils (2018). Soil Dynamics and Earthquake Engineering Vol. 122, 2019, P 261-273 doi.org/10.1016/j.soildyn.2018.12.008. 20. Kromskij, E.I. Novoe smennoe oborudovanie gidravlicheskogo ehkskavatora / E.I. Kromskij, S.V. Kondakov, K.Z. Tilloev, Kadyrova H.I. // Politekhnicheskij vestnik. Seriya «Inzhenernye issledovaniya». – 2018. –№3 (43) – 2018 –S.50-54. Тиллоев Кудратулло Зувайдуллоевич. Аспирант кафедры «Колёсные и гусеничные машины» Южно – Уральского государственного университета. Область научных интересов строительные и дорожные машины. kudratullo.tilloev@bk.ru Tел. +7(982)2962001. Tilloev Kydratyllo Zyvaidylloevich. Postgraduate Professor of «Wheel and tracked vehicles, » the South – Ural State University. Research interests- building end road machinery kudratullo.tilloev@bk.ru Tеl. +7(982)2962001 |