курсовая. КУРС. Министерство образования красноярского края кгбпоу канский политехнический колледж
 Скачать 1.04 Mb. Скачать 1.04 Mb.
|

|
(обязательное) МИНИСТЕРСТВО ОБРАЗОВАНИЯ КРАСНОЯРСКОГО КРАЯ КГБПОУ «КАНСКИЙ ПОЛИТЕХНИЧЕСКИЙ КОЛЛЕДЖ» Специальность: Автоматизация технологических процессов и производств (по отраслям) Дисциплина: Электротехнические измерения НАИМЕНОВАНИЕ ТЕМЫ Курсовая работа КР.00479926.15.02.07.19 Руководитель работы ____________________ И.О. Фамилия (оценка, подпись) ____________________ (дата защиты) Выполнил студент гр. 18-151 ____________________ И.О. Фамилия (подпись) ____________________ (дата выполнения) Содержание: 1. Введение…………………………………………………………………………………………………………3 1.1. Цель курсовой работы……………………………………………………………………….3 1.2 Назначение…………………………………………………………………………….. ВВЕДЕНИЕ Автоматизация производства является одним из основных направлений технического прогресса. Внедрение системы автоматизации позволяет освободить человека от непосредственного участия в производственном процессе. При создании автоматизированных систем управления технологическими процессами учитывают следующие требования: - сквозная автоматизация; - применение универсальных контроллеров; - документирование на внешних ЭВМ; - возможность резервирования, самоконтроля и автоматической диагностики неисправностей; - мощность и скорость обработки данных контроллерами; - гибкость регулирования, точность и надежность системы; В теплоэнергетике существует огромный потенциал развития, с каждым годом возрастает количество потребляемой энергии. Большая часть мощностей была введена в 70-80 годах XX века, поэтому на сегодняшний день многие предприятия нуждаются в реконструкции. Параллельно с реконструкцией необходимо проводить автоматизацию. Автоматизация производственных процессов приводит к повышению производительности труда, увеличению выпуска, снижению себестоимости и улучшению качества продукции, сокращению доли физического труда, повышению стабильности технологического процесса, повышению надежности и долговечности машин, дает экономию материалов, улучшает условия труда и повышает безопасность работы технологического объекта. ЦЕЛЬ КУРСОВОЙ РАБОТЫ Исследовать систему автоматического регулирования скорости вращения двигателя постоянного тока, произвести расчет регулятора для данной системы по заданным показателям качества (показатель колебательности и время регулирования). НАЗНАЧЕНИЕ Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д. Однако на практике данная опция может преследовать и другие цели: Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы. Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях. Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры. Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие. Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости. Обеспечения достаточного момента на низких частотах вращения электрической машины. Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение. ПРИНЦИП РАБОТЫ Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения. Среди используемых в промышленной и бытовой сфере следует выделить: Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения. Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности. Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д. 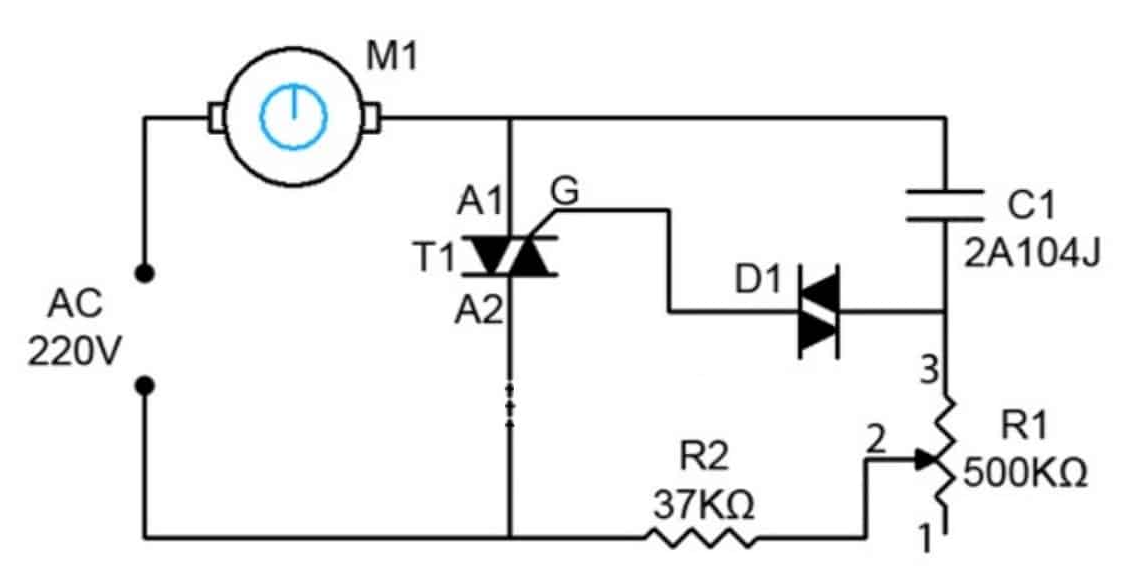 Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже. 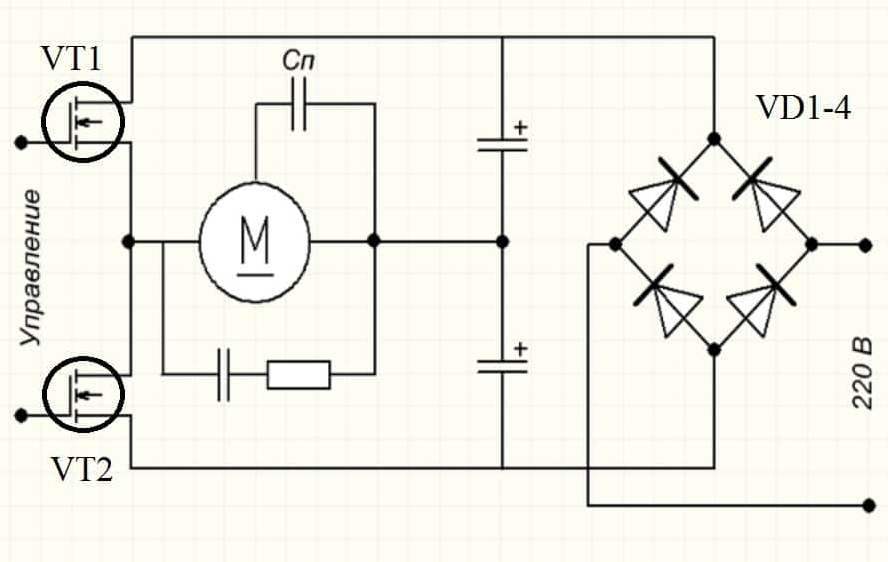 Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора. Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ. 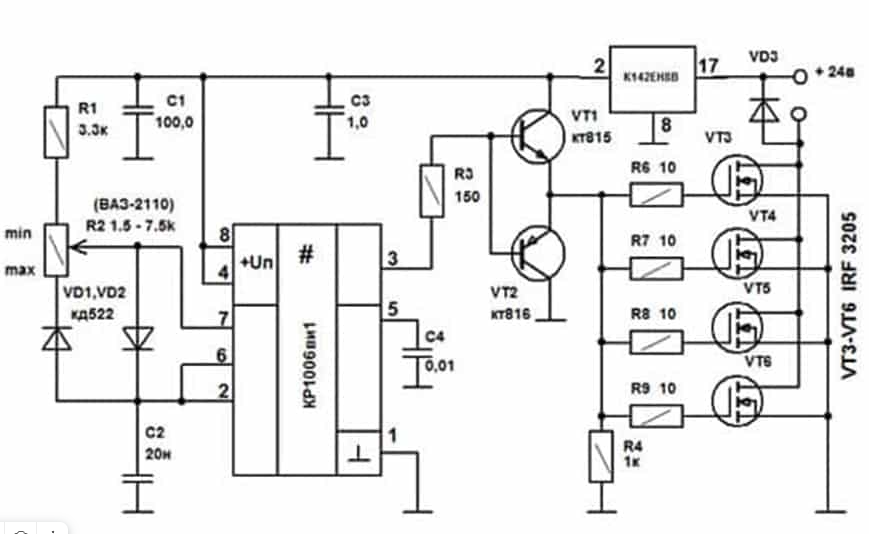 Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.  КАК ВЫБРАТЬ? Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения. Помимо этого для регулятора оборотов необходимо выбрать: Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого. Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов. Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению. Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин. Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. ПОДКЛЮЧЕНИЕ Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах. Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства: Далее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG: Затем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше. Если все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети. |