Программное обеспечение системы управления мехатронного модуля управления защитной дверью. 2 лаба. мирэа Российский технологический университет рту мирэа институт искусственного интеллекта Кафедра проблем управления
 Скачать 2.72 Mb. Скачать 2.72 Mb.
|

 МИНОБРНАУКИ РОССИИ Федеральное государственное бюджетное образовательное учреждение высшего образования «МИРЭА – Российский технологический университет» РТУ МИРЭА __________________________________________________________ Институт искусственного интеллекта Кафедра проблем управления
Москва, 2022г. ЛАБОРАТОРНАЯ РАБОТА № 1 «Отладка программного обеспечения роботехнических систем с использованием виртуального моделирования» Цель работыПолучение навыков построения программного обеспечения промышленных систем управления на базе функциональных блоков и конечных автоматов.Задание Разработать программное обеспечение системы автоматического управления приводом защитной двери. Схема механизма представлена на рисунке 1. Дверь оснащена асинхронным двигателем и четырьмя датчиками положения (  – –  ), которые реагируют на пластину, обозначенную крестиком. Открытие и закрытие двери управляется тумблером. ), которые реагируют на пластину, обозначенную крестиком. Открытие и закрытие двери управляется тумблером.При включении системы управления дверь должна двигаться в заданную сторону на небольшой скорости для определения своего местоположения. В этом режиме необходимо, чтобы индикаторы мерцали с частотой 1 Гц. После чего происходит переход в рабочий режим. В рабочем режиме обеспечить максимально возможную скорость движения на отрезке  , небольшую скорость на отрезках , небольшую скорость на отрезках  и и  (для обеспечения безопасности движения). Индикаторы должны показывать местоположение двери. (для обеспечения безопасности движения). Индикаторы должны показывать местоположение двери.Система управления ворот должна быть выполнена в виде функционального блока, предполагающего повторное использование. 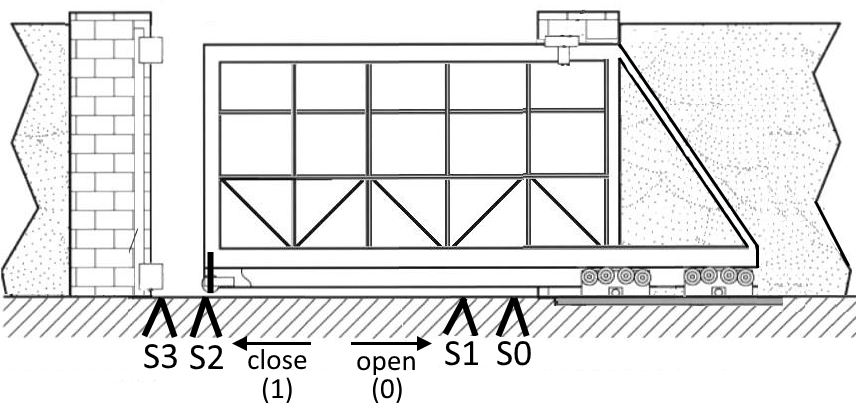 рисунок 1 – Устройство защитной двери Выполнение начинается с открытия заархивированного проекта исходной конфигурации, хранящийся в директории “C:\projects\Blank lab\POMRS_2”, распаковав его в папку группы, находящуюся в “C:\projects”. Далее необходимо открыть визуальную конфигурацию оборудования и добавить к имеющимся модуль частотного преобразователя “8I64xxxxxxx.00x-1”, соединив его шиной с основной установкой (рис. 2). 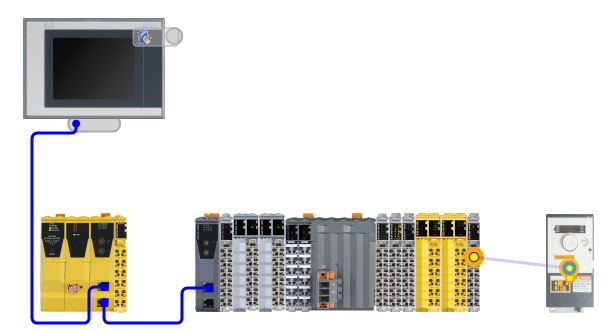 рисунок 2 – Конфигурация оборудования Реализация проекта в виде функциональных блоков используется для повышения удобства работы с созданным программным обеспечением в дальнейшем, чтобы была возможность использовать нынешние наработки в других программах. Зададим необходимые параметры для асинхронного двигателя (табл. 1). Они также указаны на самом двигателе или документации к нему. Для этого необходимо в меню в меню Physical View выбрать частотный преобразователь и в контекстном меню выбрать пункт «Configuration». Результат настройки двигателя показан на рисунке 3. Таблица 1. Параметры асинхронного двигателя.
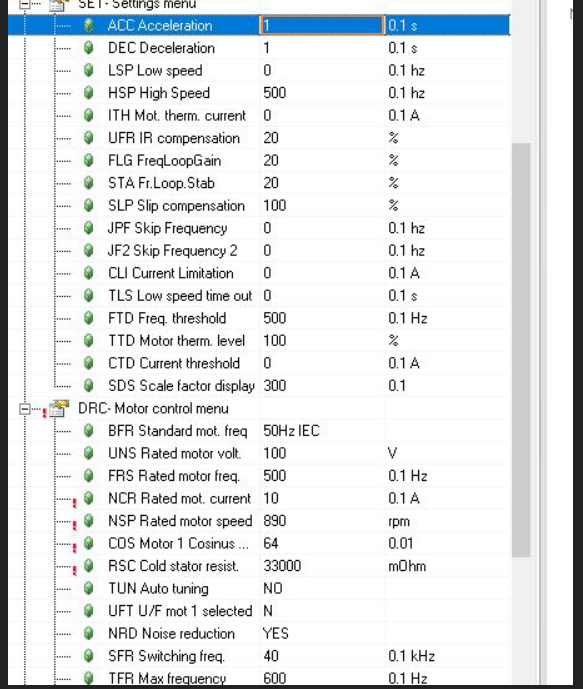 рисунок 3 – Конфигурация асинхронного двигателя через частотный преобразователь Завершив настройку частотного преобразователя, приступаем к созданию необходимых объектов в проекте, а именно: ANSI C Program; ANSI C Library « DriveLib». В библиотеке «DriveLib» создать функциональные блоки (рис. 4): «DriveStateMashine» – заготовка функционального блока управления частотным преобразователем. Структура ФБ должна иметь следующий набор переменных, указанный в таблице 2. «DoorStateMashine» - функциональный блок, в котором будет реализована основная логика программы – задание направления вращения и скорости движения воротами в зависимости от их положения и требуемого направления вращения. Для упрощения описания состояний ворот необходимо создать новый тип данных (см. приложение): перечисление «DoorStates». Сами состояния, которые необходимо добавить приведены в таблице 3, а их связь представлена в функциональной схеме (рис. 5-6). 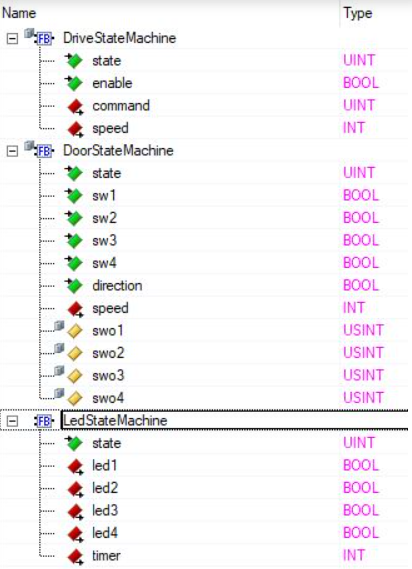 рисунок 4 - функциональные блоки и их переменные 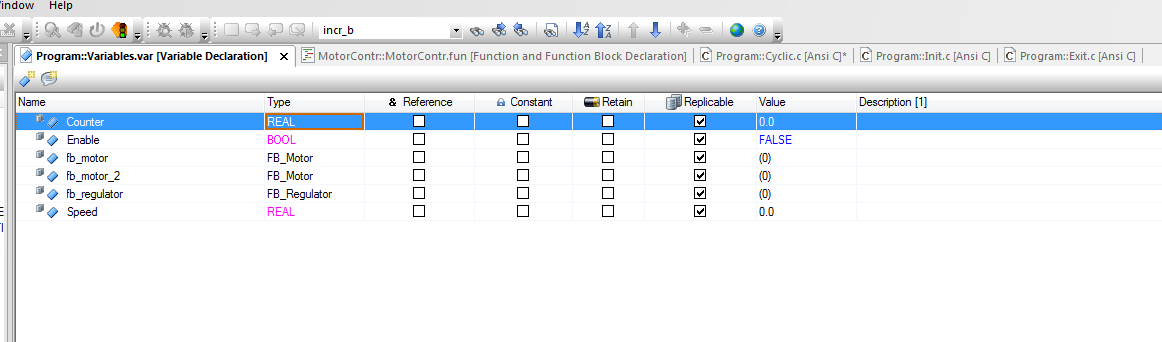 рисунок 5 - инициализация переменных функциональных блоков Таблица 2. Параметры функционального блока двигателя.
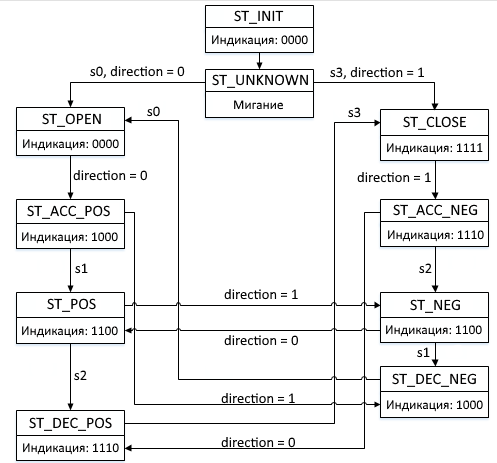 Рисунок 6. Блок-схема состояний ворот и возможных переходов между ними. Таблица 3. Состояния ворот.
Теперь, имея новый необходимый тип данных, заполним структуру функционального блока (результат представлен на рисунке 4): Таблица 4. Структура функционального блока управления воротами.
«LedStateMashine» – машина состояний обработки светодиодных индикаторов. Структура ФБ должна иметь следующий набор переменных: Таблица 5. Структура функционального блока управления воротами.
Для совмещения работы аппаратной и программной частей, следует произвести мэпинг переменных (рис.7-9). Таблица 6. Мэпинг переменных для частотного преобразователя.
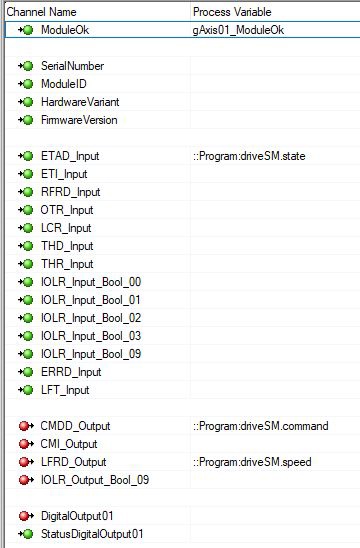 Рисунок 7. Мэппинг переменных частотного преобразователя Таблица 7. Мэпинг переменных для датчиков положения
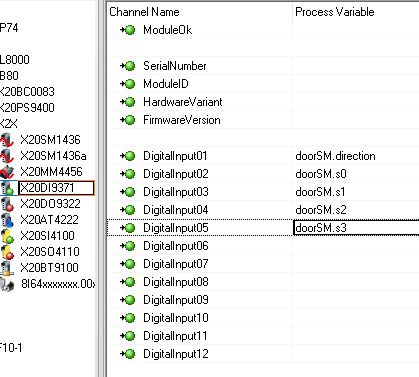 Рисунок 8. Мэппинг переменных датчиков положения Для мэпинга индикаторов для модуля X20DO9322 (DO - Digital Output), соответствия каналов соответственно будут: Таблица 8. Мэппинг переменных для индикаторов
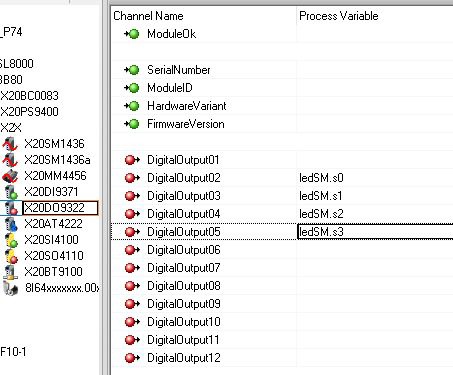 Рисунок 9. Мэппинг индикаторов Далее готовим программу к запуску программу (рис. 10-15)  Рисунок 10. Организация управления частотным преобраователем 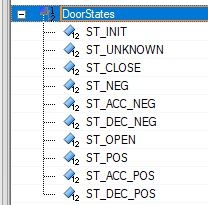 Рисунок 11. Состояния двери 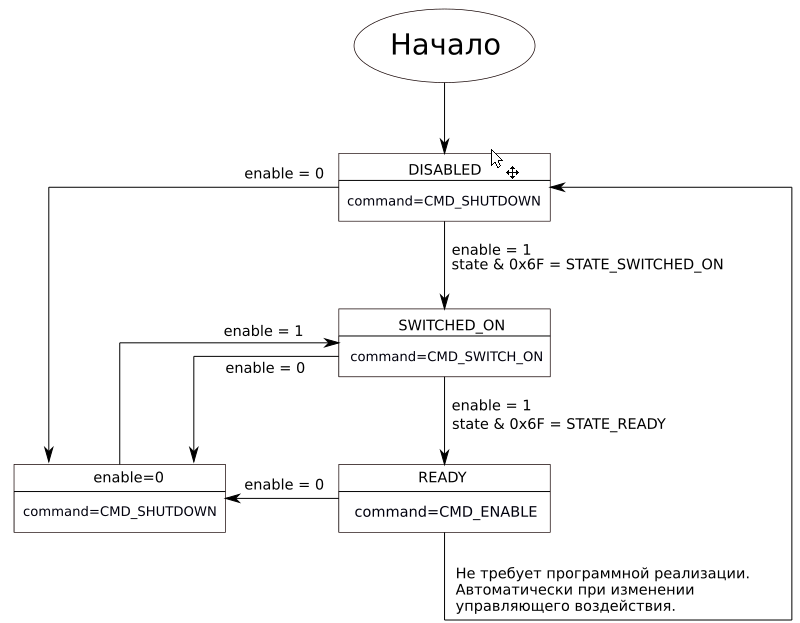 Рисунок 12. Блок-схема управления частотным преобразователем. 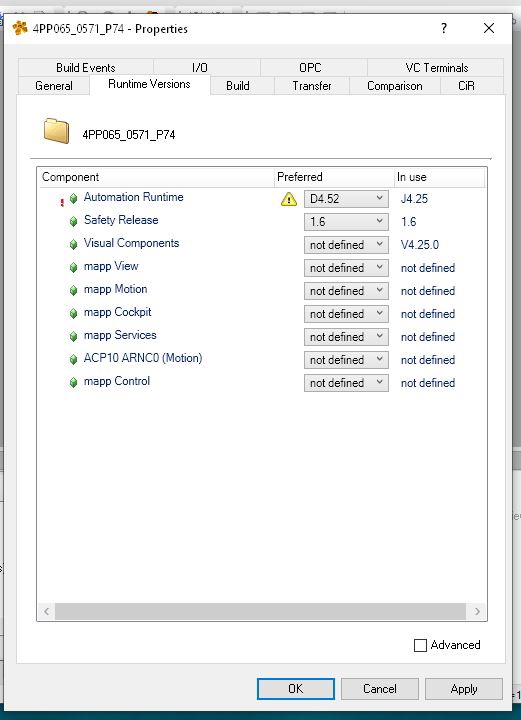 Рисунок 13. Подготовка к запуску. 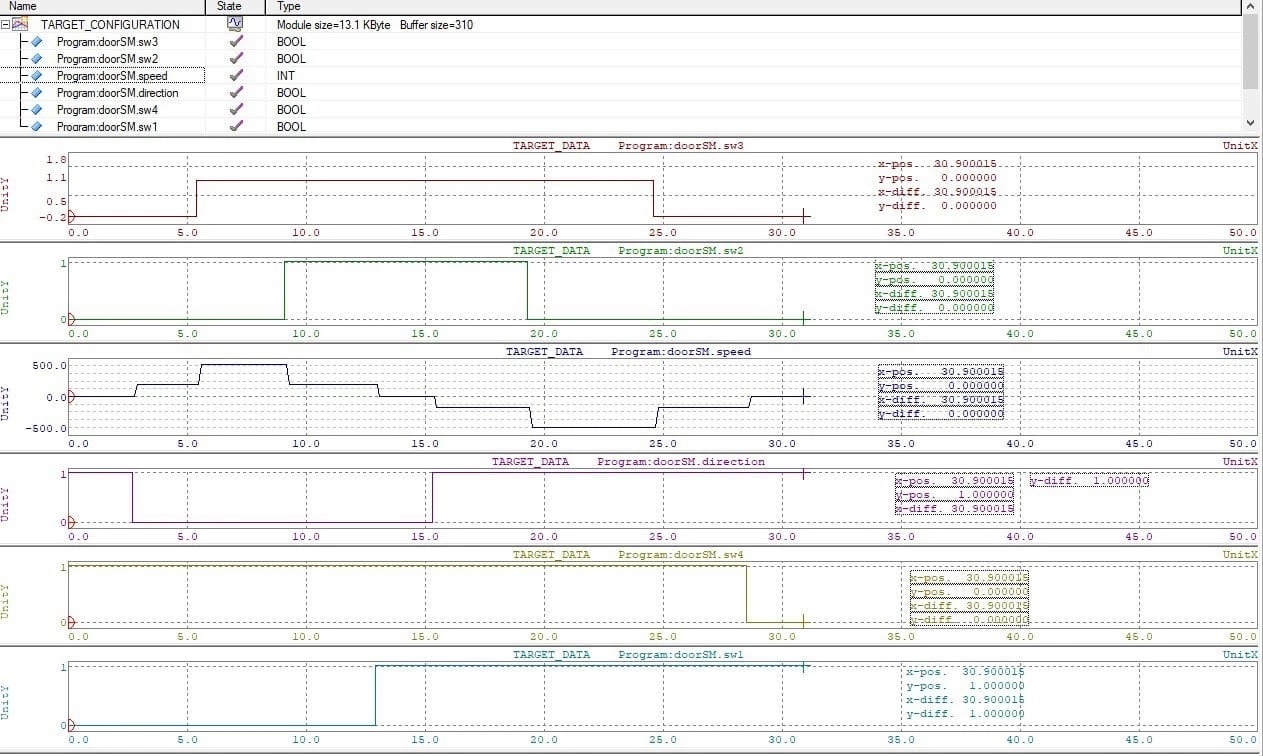 Рисунок 14. Результат запуска программы в AutomationStudio  Рисунок 15. Результат запуска программы на стенде Приложение (листинг кода) //DriveStatemachine #include #ifdef __cplusplus Extern “C” { #endif #include “DriveLib.h” #ifdef __cplusplus }; #endif void DriveStateMachine(struct DriveStateMachine* inst) { UINT mask = inst->state & 0x6f; if(!inst->enable) { inst->command = CMD_SHUTDOWN; } else { switch(mask) { case STATE_DISABLED: inst->command = CMD_SGUTDOWN; break; case STATE_READY: inst->command = CMD_ENABLED; break; case STATE_SWITCHED_ON: inst->command = CMD_ SWITCHED_ON; break; } } } //DoorStateMachine #include #ifdef __cplusplus extern "C" { #endif #include "DriveLib.h" #ifdef __cplusplus }; #endif /* TODO: Add your comment here */ void DoorStateMachine(struct DoorStateMachine* inst) { /*TODO: Add your code here*/ switch(inst->state) { case ST_INIT: { if(inst->sw1==0 && inst->sw2==0 && inst->sw3==0 && inst->sw4==0) inst->state=ST_UNKNOWN; break; } case ST_UNKNOWN: { if(inst->direction==0 && inst->sw4==0) inst->state=ST_OPEN; if(inst->direction==0 && inst->sw3==0 && inst->sw4!=0) inst->state=ST_DEC_POS; if(inst->direction==0 && inst->sw2==0 && inst->sw3!=0) inst->state=ST_POS; if(inst->direction==0 && inst->sw1==0 && inst->sw2!=0) inst->state=ST_ACC_POS; if(inst->direction==1 && inst->sw1==1) inst->state=ST_CLOSE; if(inst->direction==1 && inst->sw2==1 && inst->sw1!=1) inst->state=ST_DEC_NEG; if(inst->direction==1 && inst->sw3==1 && inst->sw2!=1) inst->state=ST_NEG; if(inst->direction==1 && inst->sw4==1 && inst->sw3!=1) inst->state=ST_ACC_NEG; break; } case ST_CLOSE: { inst->speed = 0; if(inst->direction==0) inst->state=ST_ACC_POS; break; } case ST_ACC_NEG: { inst->speed = -200; if(inst->direction==1 && inst->sw3==1) inst->state=ST_NEG; if(inst->direction==0) inst->state=ST_DEC_POS; break; } case ST_NEG: { inst->speed = -600; if(inst->direction==1 && inst->sw2==1) inst->state=ST_DEC_NEG; if(inst->direction==0) inst->state=ST_POS; break; } case ST_DEC_NEG: { inst->speed = -200; if(inst->direction==1 && inst->sw1==1) inst->state=ST_CLOSE; if(inst->direction==0) inst->state=ST_ACC_POS; break; } //LedStateMachine #include #ifdef __cplusplus extern "C" { #endif #include "DriveLib.h" #ifdef __cplusplus }; #endif void LedStateMachine(struct LedStateMachine* inst) { switch(inst->state) { case ST_INIT: { break; } case ST_UNKNOWN; { if(inst->timer%5==4) { inst->led1=!inst->led1; inst->led2=!inst->led2; inst->led3=!inst->led3; inst->led4=!inst->led4; } break; } //Cyclic #include #ifdef _DEFAULT_INCLUDES #include #endif void _CYCLIC ProgramCyclic(void) { DoorStateMachine(&doorSM); driveSM.speed = doorSM.speed; DriveStateMachine(&driveSM); ledSM.state = doorSM.state; LedStateMachine(&ledSM); } //Init #include #ifdef _DEFAULT_INCLUDES #include #endif void _INIT ProgramInit(void) { driveSM.enable=1; } //Exit #include #ifdef _DEFAULT_INCLUDES #include #endif void _EXIT ProgramExit(void) { } | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||