Шаговые двигатели- Оформление. Общее описание
 Скачать 102.66 Kb. Скачать 102.66 Kb.
|

Введение Шаговые двигатели («stepper motors» или «stepping motors» - англ.) являются одной из разновидностей бесколлекторных двигателей. Некоторые путают их с многофазными бесколлекторными двигателями. Основным отличием шагового двигателя является то, что при подаче на обмотки импульса напряжения его ротор поворачивается на некоторый фиксированный угол или шаг. Именно поэтому двигатель называется «шаговый». Общее описание Величина шага не зависит от тока обмотки и величины управляющего импульса и может составлять десятые доли градуса, что даёт возможность позиционировать ротор с недостижимой для других типов двигателей точностью. Скорость вращения шагового двигателя определяется частотой поступающих импульсов. Если шаг двигателя не зависит от тока обмотки, то его вращающий момент зависит и от тока, и от длительности поданного импульса. Момент вращения тем выше, чем меньше его скорость. Эта особенность отличает шаговый двигатель от других типов, и часто позволяет конструкторам не использовать сложные и дорогие редукторы. Разновидностью шагового двигателя является линейный шаговый двигатель. В нём ротор не вращается, а перемещается линейно на определённый шаг. Такие двигатели применяются в системах линейного позиционирования и позволяют не использовать механизмы преобразования кругового перемещения в линейное. Благодаря точному позиционированию, системы на основе шаговых двигателей не нуждаются в концевых выключателях. Кроме того, и устройства торможения ротора тоже не нужны. Он может быть достаточно жестко зафиксирован в нужном положении. Для этого достаточно сохранять ток в обмотках двигателя. Момент, с которым ротор фиксируется, называется моментом удержания. Благодаря своей конструкции, шаговые двигатели практически не подвержены износу. Они широко применяются в системах точного позиционирования: обрабатывающих станках, управлении манипуляторами - сборщиками, в промышленных автоматических линиях и т.п. Основных типов шаговых двигателей три: - двигатели с переменным магнитным сопротивлением; - двигатели с постоянными магнитами; - гибридные двигатели. Двигатели с переменным магнитным сопротивлениемВ двигателях с переменным магнитным сопротивлением момент создается магнитными потоками статора и ротора, которые ориентированы друг относительно друга. Статор и ротор имеют несколько полюсов. Момент вращения такого двигателя пропорционален величине магнитного поля, а магнитное поле пропорционально величине тока и количеству витков в обмотке. Двигатели с постоянными магнитамиВ двигателе с постоянными магнитами обмотки статора взаимодействуют с постоянными магнитами ротора. Это позволяет получить больше крутящего момента. При появлении тока в одной из катушек ротор поворачивается до тех пор, пока один из его магнитов не окажется напротив разноименной обмотки статора. Возникающая при этом обратная ЭДС не позволяет добиваться высоких скоростей. Это является недостатком данного двигателя. Гибридные шаговые двигателиГибридные шаговые двигатели из всех типов самые дорогие, зато превосходят остальные по характеристикам. Они позволяют получить меньший шаг, больший момент и высокую скорость вращения. В гибридных двигателях сочетаются лучшие стороны обоих предыдущих типов. Внешний вид и внутреннее устройство стандартного гибридного шагового двигателя показаны на рис.1  Рис.1, а. Внешний вид шагового двигателя 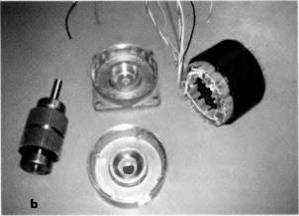 Рис.1, b. Шаговый двигатель в разборе Обычно на роторе от 100 до 400 зубцов. На статоре тоже есть зубцы с обмотками. Большинство гибридных двигателей имеют 100 полюсов (50 пар) на каждой фазе, или 200 на двух фазах. Это позволяет обеспечить угловой шаг в 1,8 градуса. 2. Варианты исполнения обмоток. Кроме конструктивных отличий, существуют разные исполнением обмоток статора. На рис.2 показаны униполярный (a), биполярный (b) и черырехобмоточный (c) варианты обмоток. Двигатели с данным исполнением называются соответственно - униполярные и биполярные.  Рис.2. Варианты обмоток статора 2.1. Униполярный двигатель Униполярный двигатель (рис.2,а) имеет в каждой фазе по обмотке с отводом посередине. Отвод позволяет управлять направлением магнитного поля обмотки. Для управления нужен очень простой драйвер, состоящий из четырёх ключей. Средние обмотки можно объединять, и иногда это делается сразу внутри двигателя. В этом случае в работе используют только пять выводов. 2.2. Биполярный двигатель В биполярном двигателе (рис 2.b) две обмотки в каждой фазе. Они включаются по очереди. Устройство для управления таким двигателем получается более сложным, чем для униполярного. В биполярный можно превратить униполярный двигатель с двумя обмотками, если не подключать средние отводы. 2.3. Четырехобмоточный двигатель Вариант с четырьмя обмотками (рис.2,с) можно превратить в униполярный и в биполярный, если соединить обмотки определенным образом. Для получения биполярного варианта обмотки можно соединять параллельно и последовательно. 3. Режимы управления шаговым двигателем Очевидно, что когда задействованы все обмотки статора, то и момент будет выше. Поэтому из биполярного двигателя можно «выжать» примерно на 40% больше мощности, чем из униполярного. На рис.3 показана форма тока в обмотках двигателя в четырех основных режимах управления. Важно, что показана форма именно тока, а не напряжения, которое имеет прямоугольную форму. На каждой картинке показаны токи в двух фазах относительно нулевой точки «ОА» 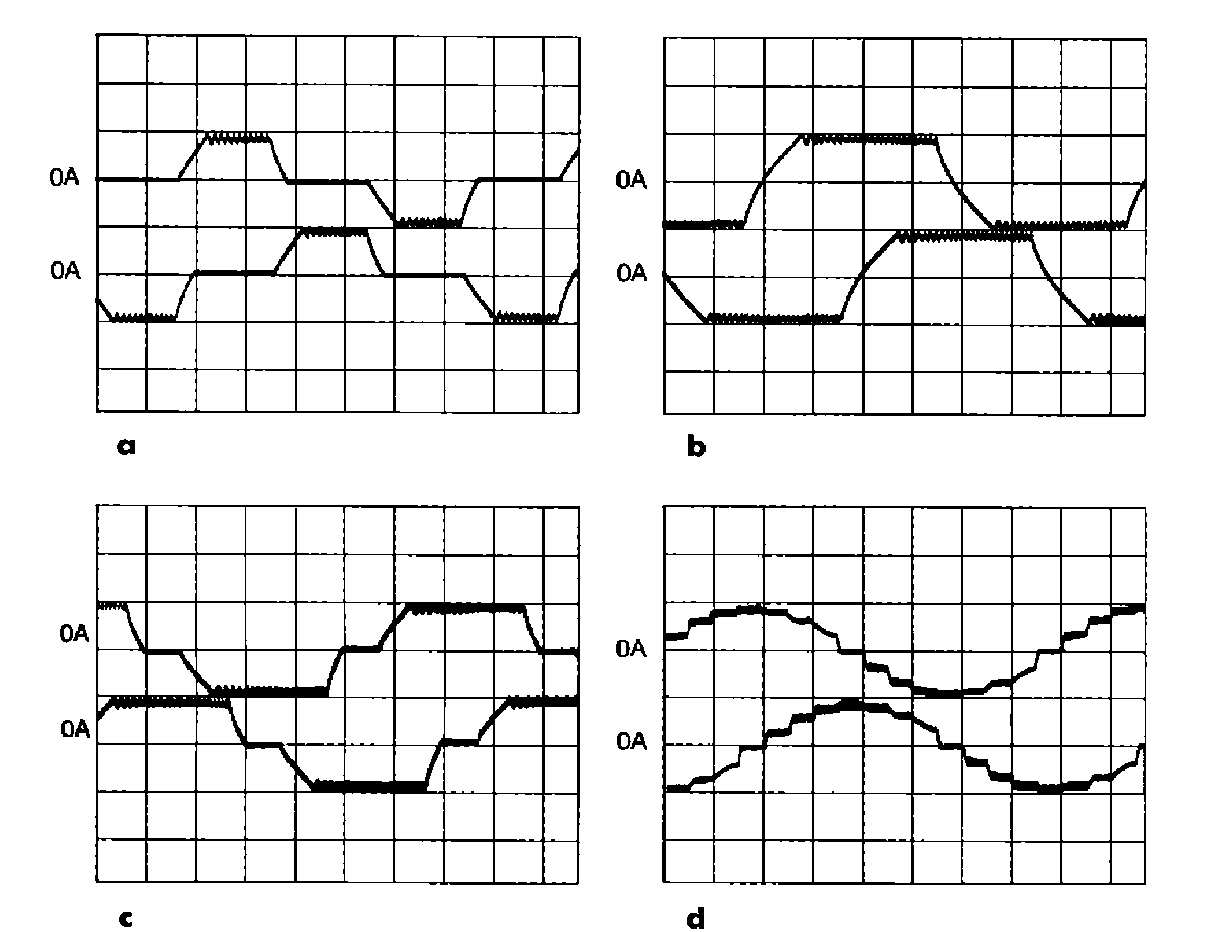 Рис.3 Ток обмоток в разных режимах работы. а) волновой режим, b) полношаговый режим, с) полушаговый, d) микрошаговый 3.1. Волновой режим Первый вариант (рис.3,а) – самый простой. В нём фазы коммутируются попеременно, не перекрывая друг друга. Это волновой режим или полношаговый режим с одной фазой. Шаг ротора при работе завершается в тех же точках, в которых ротор фиксируется при выключении. Метод недостаточно хорош из-за невозможности достичь максимального момента. Ведь в каждый момент времени работают только половина обмоток биполярного двигателя и лишь четверть униполярного. 3.2. Полношаговый режим Чаще в управлении шаговым двигателем применяют метод с перекрытием фаз, когда нагружены обе обмотки (рис.3,b). В общем виде его называют полношаговым режимом управления («full step mode», «two-phase-on»). Ротор при таком методе фиксируется в полупозиции между полюсами статора. Получаем шаг такой же по величине, но со смещением точки равновесия ротора на полшага. Чтобы при отключении ротор не смещался, при остановке на двигатель подают ток удержания. Это позволяет не использовать дополнительные тормоза. 3.3. Полушаговый режим Третий режим управления называется полушаговым («half step mode» или «оnе and two-phase-on») (рис.3, c). В нем можно добиться вдвое меньшей величины шага, чем предусмотрено конструкцией двигателя. Например, на двигателе с угловым шагом 1,8 градуса можно получить шаг в 0,9 градуса. Это достигается комбинацией двух предыдущих режимов, и позволяет уменьшить влияние механического резонанса ротора. Для управления в таком режиме нужна более сложная схема. 3.4. Микрошаговый режим Разбить шаг на еще более мелкие подшаги можно с помощью микрошаговых систем («micro stepping mode») (рис.3, d). В таком режиме ток через обмотки изменяется постепенно. Достичь этого достаточно сложно, поэтому для управления в микрошаговом режиме используют микропроцессорные системы. При любом способе управления ток обмоток не должен превышать величину, указанную в документации на двигатель. Изменить направление вращения шагового двигателя просто. Это не требует дополнительных электромеханических устройств, как в коллекторных двигателях. Надо лишь поменять очередность включения обмоток. Это легко реализуется программно или в настройках драйвера. Но нужно учитывать особенности поведения ротора. Про них поговорим ниже. 4. Особенности использования шаговых двигателей При использовании шаговых двигателей можно столкнуться с некоторыми проблемами, которые надо учитывать при работе. 4.1 Явление механического резонанса. Ротор является свободно подвешенной системой, и от толчка при переходе на следующий шаг начинает колебаться. Чтобы устранить эти колебания либо используют механические демпферы и муфты, либо закорачивают свободную обмотку (при наличии). В некоторых типах управляющих устройств применяется функция торможения. Но самым эффективным способом будет использование микрошагового режима. Чем мельче система управления дробит шаг, тем меньшие колебания испытывает ротор. Колебания ротора в полношаговом и микрошаговом режимах показаны на рис.4 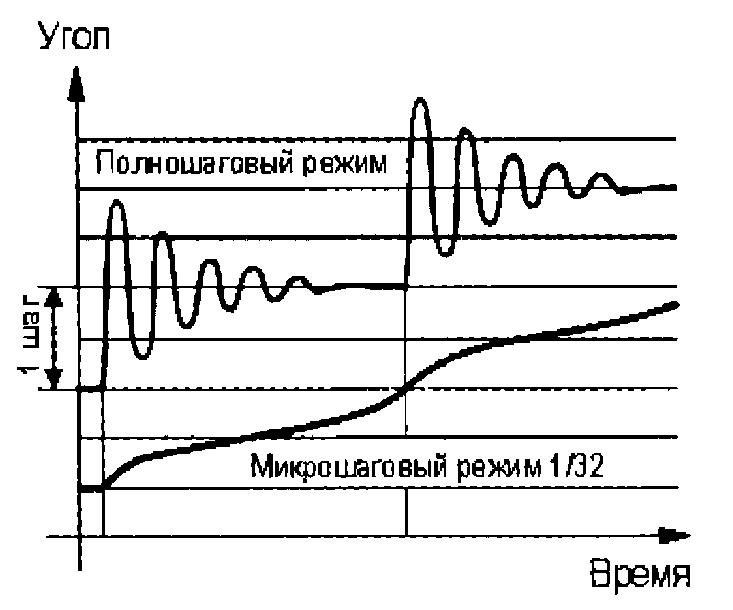 Рис.4 Пошаговые колебания ротора 4.2 Индуктивность обмоток.Ток в обмотке не меняется скачкообразно. Поэтому слишком высокая частота на обмотках не позволит развить наибольший крутящий момент по причине того, что ток за время импульса не успеет достичь максимального значения. Вариантом решения проблемы является повышение напряжения питания с ограничением тока обмоток. Оно достигается либо последовательным подключением к обмоткам резистора, либо переходом источника питания обмотки в импульсный режим при достижении максимально допустимого тока. Как раз такой вариант изображен на рис.3 Оптимальным метод будет ключевая стабилизация тока. Она применяется во многих интегральных микросхемах драйверов, например, LMD18245 [5] 4.3 Ограничение стартовой скорости шагового двигателя. Иногда в документации на шаговый двигатель приводятся график момент - скорость из двух кривых (рис.5). 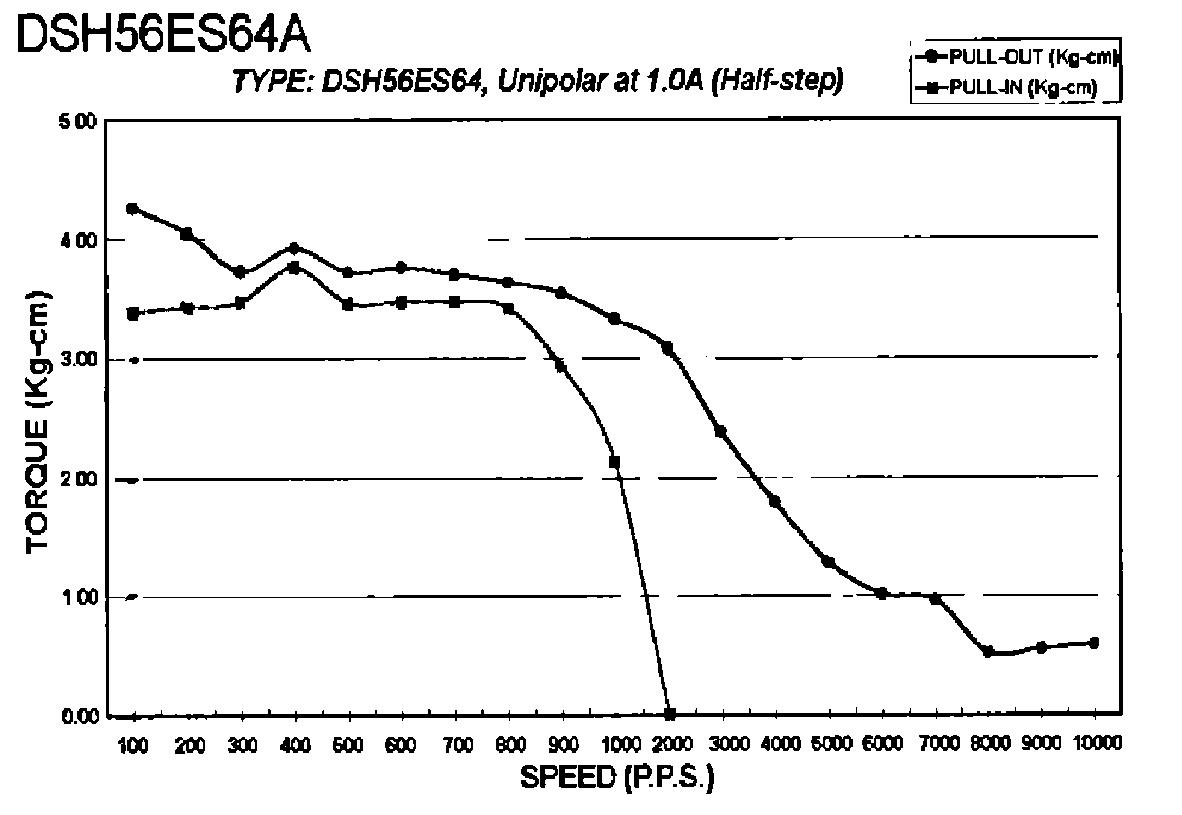 Рис.5. Графики максимальной скорости Кривая, расположенная ниже (кривая старта или «pull-in torque»), показывает максимальный момент трения на данной скорости, при котором двигатель начнет движение без разгона. Точка пересечения кривой с осью скорости называется максимальной частотой старта. Производитель часто умалчивает, что этот параметр актуален для определенного режима работы, а нагрузка на двигателе не инерционная, а фрикционная, когда трение во фрикционной муфте снижает паразитные колебания ротора, и скорость вращения двигателя повышается. Режим работы тоже важен. Ведь в полушаговом режиме явления резонанса меньше. Имеется также вариант полушагового режима с компенсацией момента [5]. На рис. 5 график задан для полушагового режима униполярного двигателя. Кривая, расположенная выше (кривая разгона или «pull-out torque»), показывает, при каком моменте трения ненагруженный двигатель вращается без пропуска шагов. Но с учетом проведенного плавного запуска. Кривая разгона показывает максимальную скорость ненагруженного двигателя. Этот параметр зависит от тока обмоток и способа управления. Для стабильной работы рекомендуется брать запас от 50 до 100% от необходимого момента. Заключение В связи с вышеизложенным, для преодоления момента трения на малых скоростях может потребоваться разгон двигателя до рабочей скорости. Торможение происходит снижением скорости до некоторого минимума, и только потом движение полностью прекращается и включается режим удержания. Иначе нельзя гарантировать точность позиционирования ротора. Более того, при применении редуктора он может быть разрушен за счет инерционности системы. Оценить скорости двигателя косвенно можно по индуктивности обмоток. Большая индуктивность «замедляет» двигатель. К недостаткам шаговых двигателей можно отнести и акустические шумы, вызванные низкими частотами управления. Если требуется точное позиционирование ротора или всего механизма, применяется постоянное фрикционное торможение. Особенно оно нужно при использовании понижающих редукторов. Фрикционные пары для дисковых тормозов нужно подбирать так, чтобы их свойства сохранялись максимально долго. Например, можно использовать вставки из сукна или фетра, полиуретана, но наилучший эффект дают вставки из фторопласта или твердой кожи. Если деталь изготовлена из мягкого сплава, например алюминия, то фрикционные тормоза нужно подбирать особенно тщательно. Хорошо показывают себя дополнительные диски из твердых сплавов или пластмассы. Тормоз для систем повышенной точности должен регулироваться и иметь пружинный компенсатор, обеспечивающий постоянное усилие торможения. Пример такого тормоза, используемого ООО «Модуль-98», показан на рис.6  Рис.6. Внешний вид тормоза Шаговые двигатели относительно дороги, но они входят в состав старой периферийной техники, которую можно купить буквально за копейки. Например, двигатель SPM-20 входит в состав дисковода 5.25» Mitsumi, а ЕМ-483 - принтера Epson Stylus C86. Примеры таких двигателей можно найти на сайте www.roboforum.ru. Несложные схемы управления шаговыми двигателями представлены в [7] Список литературы Емельянов А.В. Шаговые двигатели: учеб. пособие / А.В. Емельянов, А.Н. Шипин / ВолГТУю. - Волгоград, 2005. Кенио Такаши. Шаговые двигатели и их микропроцессорные системы управления / Пер. с англ. - М.: Энергоатомиздат, 1987. http://www.stepmotor.ru/articles/ http://de.nanotec.com/schrittmotor_animation.htmi «LMD18245 ЗА, 55V DMOS Full-Bridge Motor Driver» National Semiconductor Corporation TECO Electro Devices Co., Ltd DSH56 Series, Specification. - http://www.tedmotors.com/DSH56.htm Vladimir Rentyuk. Control stepper motors in both directions // EDN. - 2010. - March 18. |