Дипломная работа Изюмов А. М. (Автосохраненный). Общие сведения
 Скачать 0.69 Mb. Скачать 0.69 Mb.
|

|
Введение Цель дипломной работы – произвести расчет электропривода грузовой лебедки и выбор соответствующих компонентов. Номинальная мощность привода составляет 36 кВт. Данные лебедки широко используются на судах-сухогрузах класса handymax. Актуальность данного проекта связана с необходимостью полного переоборудования грузоподъемных механизмов данного судна вследствие переориентации его назначения. Переоснащение судна может быть связано с изменением его торгового маршрута, рода и характера груза, ускорения погрузочных операций и т.д. Так как исходные данные для комплектации привода четко сформулированы в техническом задании проекта, то задача сводится к анализу существующего оборудования и выбору наиболее оптимального и экономичного варианта комплектации. Считаю целесообразным рассмотреть различные системы электроприводов и схем управления и выявить ту, которая в большей степени удовлетворяет требованиям экономичности, надежности, ремонтопригодности, безотказности и др. На основании предложенной схемы привода будет рассчитана смета, отражающая реальную стоимость реализации проекта. В проекте будет разработан регламент технического обслуживания электропривода. Считаю необходимым рассмотреть также аспекты связанные с охраной труда, а именно безопасная техническая эксплуатация грузоподъемных механизмов и техника безопасности при работе с ними.
 Рисунок 1 – Пример сухогруза класса Handymax. Сухогрузs класса Handymax являются балкерами, то есть, предназначены для транспортировки насыпных и навалочных грузов, таких как зерно, уголь, руда, цемент и др. Общеизвестно что, перевозки навалочных грузов составляют 40 % мирового торгового грузооборота, при этом Handymax является самым распространённым среди балкеров и составляет 37 % от всего балкерного флота. Особенностью данного класса балкеров является наличие своего грузового оборудования, что делает возможным осуществлять грузовые работы в портах, в которых не предусмотрены грузовые средства для погрузки/разгрузки балкеров. Также, среди балкеров своё грузовое оборудование имеет балкер класса Handysize, но имеет меньшую грузоподъёмность, поэтому многие владельцы судоходных компаний отдают предпочтение классу Handymax. В этом заключается преимущество использования балкера Handymax. В период с 2010 по 2015, по данным [1] наблюдалась устойчивая тенденция к росту оборота навалочных грузов среди стран юго-восточной Азии. Учитывая тот факт, что перевозки навалочных грузов демонстрирую т устойчивую тенденцию к росту, а грузовые операции являются их неотъемлемой частью, считаю актуальность данного проекта обоснованной. 1.1 Описание электропривода, основных режимов работы. Требования, предъявляемые к данным электроприводам. Электрическим приводом называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройства, предназначенная для приведения в движение вспомогательных органов рабочей машины и управления этим движением. Основные электромеханические параметры электродвигателя: мощность, напряжение, сила тока, угловая скорость, вращающий момент, коэффициент полезного действия и коэффициент мощности. Подавляющее большинство современных электролебёдок блочного типа. Электропривод, аппаратура управления им и механизм лебёдки выполнены в виде одного компактного блока. Водозащищённый электродвигатель либо установлен на общем фундаменте, либо прикреплён фланцем к корпусу редуктора лебёдки. 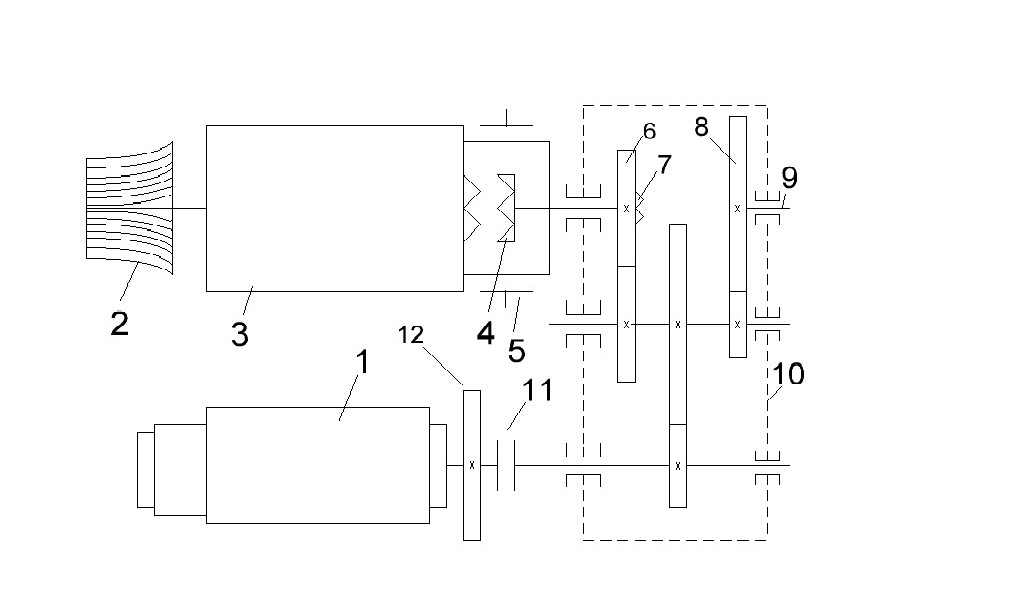 Рисунок 2 – Кинематическая схема быстроходной двухскоростной лебёдки. Пускорегулировочная аппаратура обычно встроены в основание лебёдки, где для них предусмотрен специальный ящик. Станция управления электроприводом в виде водозащищённого шкафа крепится к основанию лебёдки. На рисунке 2 изображена кинематическая схема быстроходной двухскоростной лебёдки, на которой изображено: 1 – поворотная платформа; 2 –неподвижный вал; 3 – вертикальный электродвигатель; 4 – редуктор; 5 – малая цилиндрическая шестерня; 6 – большая шестерня. Электродвигатели (ЭД) должны соответствовать режим работы приводимого механизма. Режимы работы судовых механизмов чрезвычайно разнообразны, поэтому характер тепловых процессов, протекающих в обмотках электродвигателя, неодинаков для различных приводов. В соответствии с условиями нагрева электродвигателя различают три основных режима работы электропривода: продолжительный, кратковременный и повторно-кратковременный. Электропривод грузовой лебёдки работает в повторно-кратковременном режиме, который характеризуется тем, что за время работы ЭД не успеет нагреться до установившейся температуры, а за время паузы не успеет охладиться до температуры окружающей среды. Суммарная продолжительность рабочего периода и паузы, то есть время цикла, не должна превышать 10 минут. Напряжённость этого режима оценивается коэффициентом, называемым продолжительностью включения. В повторно-кратковременном режиме ЭД недоиспользуется по нагреву, а значит можно выбрать двигатель меньшей мощности. По тем же соображениям, что и в кратковременном режиме, для повторного-кратковременного режима промышленность выпускает специальные ЭД, обладающие большей перегрузочной способностью, чем ЭД для продолжительного режима. Эти ЭД имеют стандартную продолжительность включения 15, 25, 40 и 60%. Для грузовых лебедок ГОСТ 12617-78 устанавливает следующее:1) Для лебедок могут применяться контроллерная и контакторная системы управления электроприводом; 2) Система управления электроприводом лебедок при контакторном управлении должна обеспечивать автоматическую задержку на промежуточных положениях при разгоне и торможении; 3) Лебедки должны выпускаться с электрооборудованием морского исполнения переменного тока 380В, 50Гц или постоянного тока 220В. В обоснованных случаях допускается выпуск лебедок с электрооборудованием переменного тока 220В, 50Гц; 4) Наименьшая мощность двигателя переменного тока в режиме ПВ=40% на обмотке наибольшей частоты вращения должна быть не менее 90% мощности, соответствующей выбиранию с номинальным тяговым усилием при наивысшей частоте вращения. Двигатель переменного тока должен допускать работу в режиме ПВ=100% при мощности 50% номинальной с наибольшей скоростью, а также в режиме ПВ=25% с наименьшей скоростью. Время непрерывной работы на обмотках низшей и средней частот вращения должно составлять не менее 5 мин на каждой обмотке при включении с холостого состояния. Номинальная мощность двигателя постоянного тока в режиме ПВ=40% должна быть не менее 70% мощности, соответствующей выбиранию шкентеля с номинальным тяговым усилием при номинальной частоте вращения. Электропривод постоянного тока должен обеспечивать работу на промежуточных реостатных характеристиках при всех нагрузках от холостого хода до номинальной и не менее ПВ=17,5% время непрерывной работы при указанных условиях должно быть не менее 2 мин. Основные требования определяются назначением и условиями работы судовых грузоподъёмников. Главное требование – это сокращение времени стоянки судна в порту под погрузочно-разгрузочными операциями в целях повышения рентабельности эксплуатации судна в целом. Сокращение продолжительности стоянок судов в портах повышает общую провозоспособность флота и ведёт к снижению себестоимости перевозок. Это является одним и важных направлений интенсификации работы флота и приобретает тем большую значимость, чем более высокими становятся скорости хода судов и чем больше сокращаются продолжительности их переходов между портами. Таким образом, к электроприводам судовых грузоподъёмников предъявляется в первую очередь требование обеспечить высокую производительность и наилучшую организацию грузовых работ. Также предъявляются требования общего характера, связанные с обеспечением надёжности этих установок и их экономичности. 1.2 Элементы и особенности судовых грузовых лебёдок Основной частью грузового устройства является грузовая стрела с такелажем. 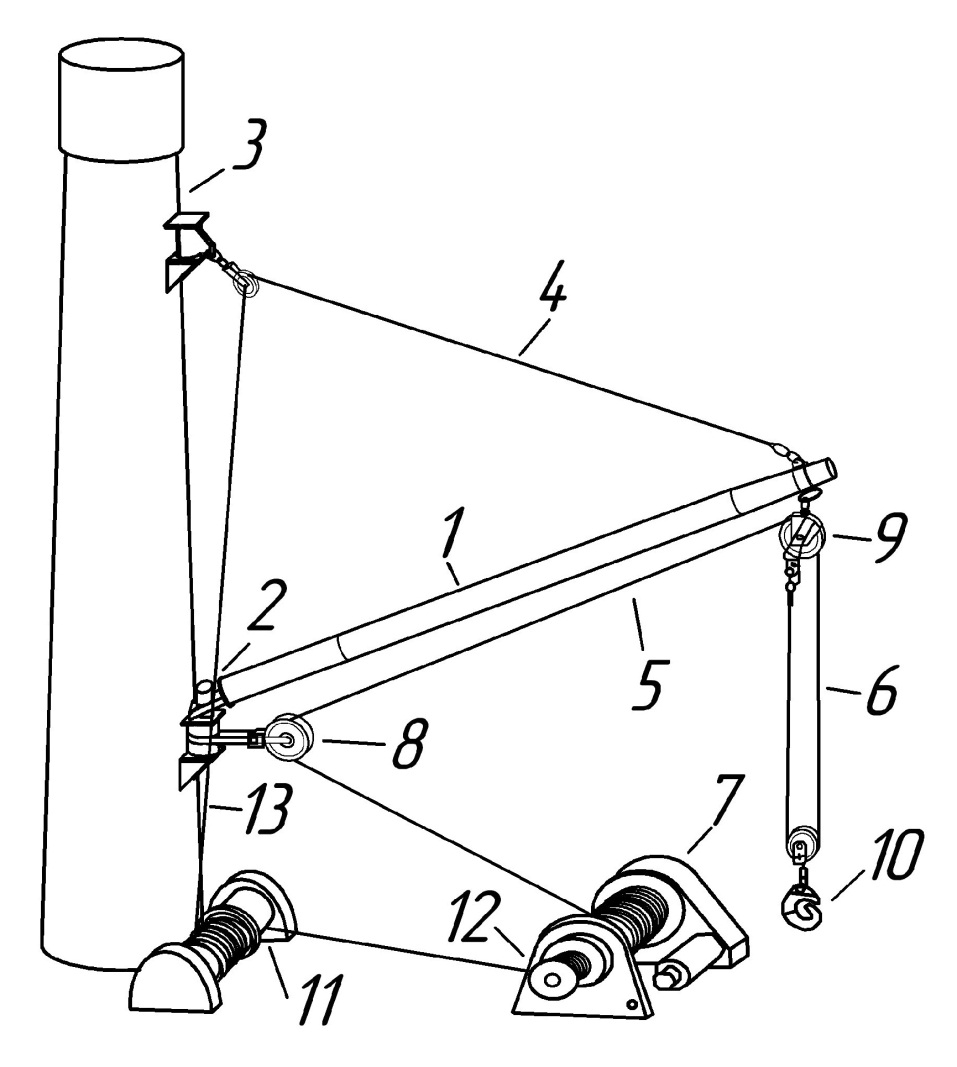 Рисунок 3 – грузовая стрела с такелажем. На рисунке 3 изображена схема грузовой стрелы с такелажем, которая состоит из следующих элементов: нижний конец стрелы (1) шарнирно закреплён при помощи подпятника (2) у основания мачты или грузовой колонны (3), а верхний конец – нок – поддерживается переброшенным через блок топенантом (4) и раскреплён двумя боковыми оттяжками (5). Нижние концы оттяжек прикреплены через полипасты к палубе судна по обеим сторонам от стрелы. Шкентель (6) одним концом закреплён на барабане грузовой лебёдки (7) и переброшен через верхний и нижний блоки (8) и (9). На втором конце шкентеля прикреплено грузозахватное приспособление гак (10). Вылет стрелы уменьшают, наматывая лопарь топенанта (11) на турачек (12) лебёдки. После установки стрелы в нужное положение и раскрепления её оттяжками топенант прикрепляют к палубному глаголь-гаку при помощи отрезка цепи (13) и снимают лопарь с турачка, освобождая лебёдки для работы с грузом. На современных судах для облегчения операций со стрелой применяют специальные топенантные лебёдки, устанавливая их на палубе вблизи грузовой лебёдки или на площадке мачты на уровне выше человеческого роста. Грузовая лебёдка – это механизм, обслуживающий грузовое устройство судна, которое предназначено для погрузки и разгрузки на рейдовой стоянке или у немеханизированного причала. 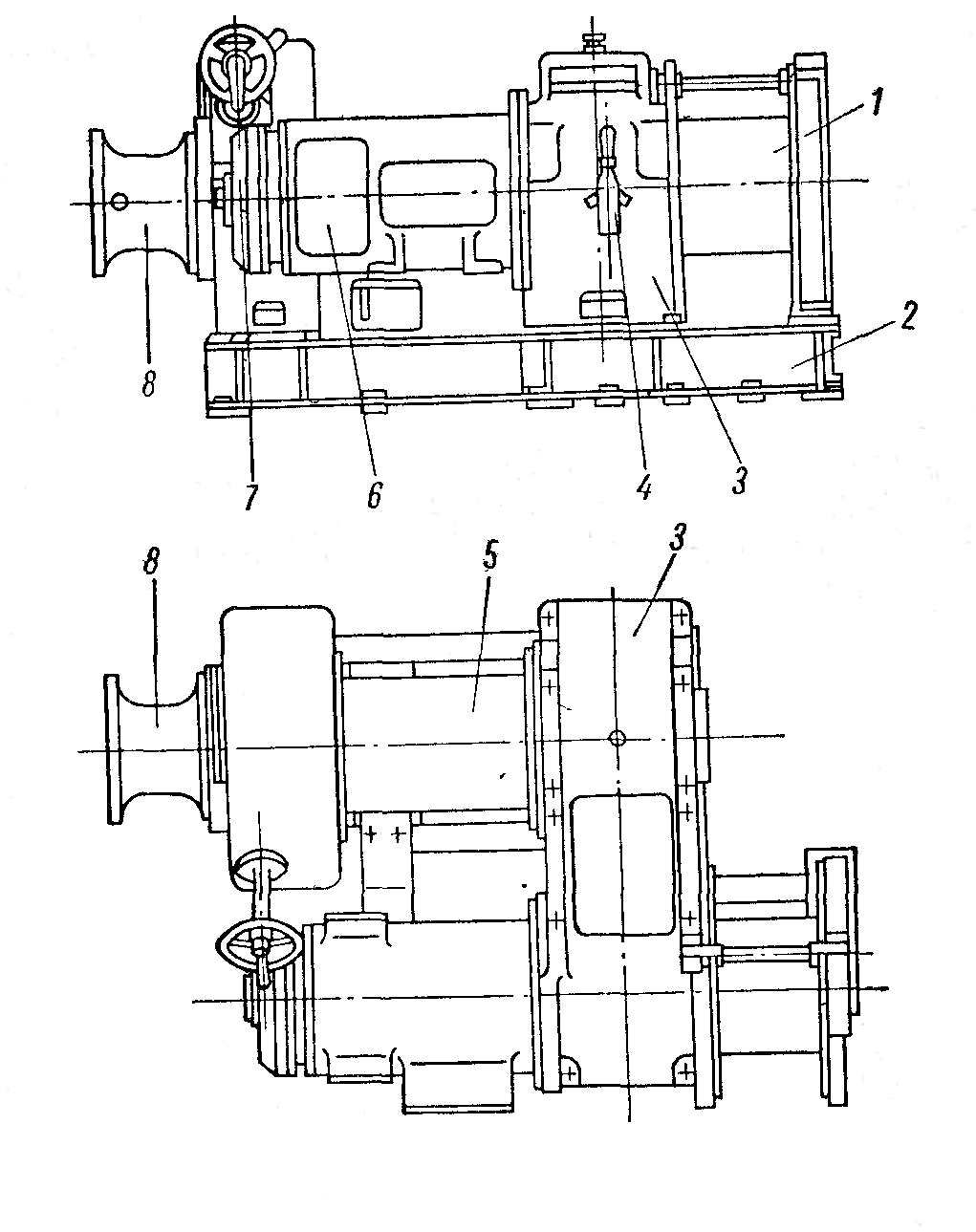 Рисунок 4 – Грузовая лебёдка типа ЛЭ-45-4. На рисунке 4 изображена лебёдка типа ЛЭ-45-4, в неё входят: 1-топенантный барабан; 2-общая рама; 3-цилиндрический редуктор; 4-рычаг; 5-грузовой барабан; 6-двигатель; 7-ленточный тормоз; 8-швартовный барабан; Механизм лебёдки и двигатель (6) расположены на общей раме (2). Лебёдке может быть придан приставной барабан грузоподъёмностью 10 тонн, устанавливаемый на стойках и присоединяемый к ней открытой зубчатой передачей. Двигатель через цилиндрический редуктор (3) вращает вал, на котором расположен грузовой (5) и швартовный (8) барабаны. Грузовой барабан соединен с главным валом кулачковой муфтой. Лебедка имеет топенантный барабан (1), приводимый в движение цепной передачей, расположенной в редукторе. Для включения и выключения топенантного барабана служит кулачковая муфта, управляемая рычагом (4) на корпусе редуктора. Электродвигатель снабжен электромагнитным дисковым тормозом. Для стопорения грузового барабана при его отключении от главного вала, а также для регулирования скорости спуска служит ленточный тормоз с ручным управлением (7).
Грузовые устройства служат для выполнения на судах погрузочных и разгрузочных операций судовыми средствами. Эти устройства приспособлены для грузовых операций с генеральными, сыпучими или жидкими грузами. Экономически выгодно грузовые операции на судах производить развитыми и мощными портовыми средствами, однако иногда судам приходится грузовые операции совершать на рейде или на промысле, в открытом море, или даже и в порту, где портовые средства использовать нецелесообразно. Для этих случаев каждое судно должно иметь собственное грузовое устройство. Суда, перевозящие генеральные грузы, имеют грузовые устройства, в которые входят подъемные краны или грузовые стрелы с такелажем, с грузовыми лебедками и средства внутритрюмной механизации. На судах, предназначенных для перевозки сыпучих грузов, грузовые устройства состоят из пневматических погрузчиков, ленточных или ковшовых транспортеров или других специальных устройств. На большинстве таких судов не ставят собственные грузовые устройства, так как они плавают на определенных линиях, на которых грузовые операции производятся береговыми, специально приспособленными устройствами. К грузовым устройствам наливных судов относятся насосы , запорная и переключающая арматура и грузовые трубопроводы. В морских перевозках преобладают генеральные грузы, поэтому рассмотрим грузовые устройства, устанавливаемые на большинстве морских судов. Грузовые подъемные краны — прогрессивные приспособления, они намного увеличивают производительность грузовых работ, упрощают и облегчают трудоемкие процессы в грузовых операциях. Известно много разнообразных конструкций и систем судовых грузоподъемных кранов. Кран-стрела сочетает простоту конструкции и обслуживания с высокой маневренностью и производительностью в работе. К недостаткам таких кранов следует отнести трудности в работе с ними при крене и качке судна в открытом море. Грузовое стреловое устройство, несмотря на кажущуюся громоздкость, при квалифицированном использовании в работе двух стрел, позволяет по производительности превзойти работу грузовых кранов и широко применяется на судах. Грузовые стрелы крепятся на мачтах или на специальных грузовых колоннах. Стрелы грузоподъемностью до 10 т называются легкими, свыше 10 т — тяжеловесными. Их изготовляют стальными в виде трубчатого стержня веретенообразной формы (по концам меньшего диаметра, чем в середине). Нижний конец — шпор — шарнирно связан через вертлюг и башмак шпора с мачтой, что позволяет стреле выполнять поворот в горизонтальной плоскости, производимый с помощью оттяжек. Верхний конец стрелы — нок — через обух поддерживается тросом, называемым топенантом, длина которого создает наклон стрелы. Грузовой гак закреплен на подвижном тросе, называемом шкентелем или горденем, который закреплен на барабане грузовой лебедки. Грузовые лебедки могут иметь электрический или электрогидравлический привод. Применение на судах люковых закрытий с механическими приводами, увеличение площади раскрытия палуб и механизация погрузочно-разгрузочных операций намного сокращает время простоя судов в порту. Развитие океанического рыбного промысла, широкое распространение научных экспедиций и дальних походов, привело к необходимости снабжения судов в море горючим, пресной водой, продовольствием, специальными грузами, средствами материально-технического снабжения и ремонта и приема с судов продукции промысла и других грузов. Для этой цели создаются специальные суда или на судах, находящихся в эксплуатации, монтируются устройства, обеспечивающие передачу грузов на суда в море на ходу. По способу передачи грузов эти устройства разделяются на кильватерные и траверзные. Кильватерная передача осуществляется между двумя судами, идущими вслед друг другу или строем уступа. Траверзная передача — между судами, идущими на некотором расстоянии друг от друга параллельным курсом. Расстояние между судами зависит от скорости хода, водоизмещения обоих судов, волнения моря и ряда других факторов и колеблется при кильватерном ходе в пределах 160—240 м, а при траверзном — 45—90 м.
Оптимальная скорость подъема номинального груза является важным фактором увеличения, производительности грузовых лебедок. Существуют, однако, целесообразные уровни повышения этой скорости, поскольку вместе с ней подвышается мощность установки, ее масса и стоимость. А главное, начиная с определенного уровня, скорость подъема номинального груза в зависимости от размеров судна н технологии грузовых работ перестает заметно сказываться на сокращении времени цикла и на увеличении производительности грузоподъемника. Более того, сильно повышенные скорости при ограниченной высоте борта судна и, соответственно, высоте подъема груза остаются просто неиспользованными, так как нагруженный электропривод на протяжении ограниченного пути не успевает получить полного разгона, а если и успевает, то достигнутая им скорость не используется достаточно продолжительно в установившемся режиме. Рабочие периоды в общем цикле работы составляют только его часть, определяемую ПВ%. Для современных лебедок ПВ примерно равна 40%, и поэтому после определенного уровня скорости поднятия полного груза, а то даже и при полном исключении основного рабочего времени мы не получили бы ощутимого эффекта в сокращении полного периода работы. Важно, однако, заметить, что общее сокращение продолжительности цикла, благодаря развитию передовых методов труда и внедрению средств малой механизации, ведущим к сокращению продолжительности работ на берегу и в трюме, вызывает значительное увеличение ПВ% и делает повышение скорости поднятия полного груза в некоторой мере целесообразной. Расчет продолжительности циклов Т в зависимости от скорости  подъема номинального груза с учетом дополнительной механизации грузовых работ и использование статистических данных по их хронометрированию позволили получить кривые подъема номинального груза с учетом дополнительной механизации грузовых работ и использование статистических данных по их хронометрированию позволили получить кривые  рис. 2 из которых следует, что повышение номинальной скорости лебедок выше 50 – 60 м/мин перестает ощутимо сказываться на повышении их производительности. В результате обобщения данных ведущих иностранных фирм и отечественного опыта по комплектованию и эксплуатации судовых лебедок и кранов для высокопроизводительных грузовых механизмов подъема рекомендуются при средней высоте до 10 номинальные скорости 45 – 55 м/мин и при больших высотах – до 85 м/мин в зависимости от рода тока. В зарубежной практике встречаются скорости до 120 м/мин, что связано, например, со значительным увеличением пути перемещения грузов при спаренной работе судовых и береговых грузовых средств. рис. 2 из которых следует, что повышение номинальной скорости лебедок выше 50 – 60 м/мин перестает ощутимо сказываться на повышении их производительности. В результате обобщения данных ведущих иностранных фирм и отечественного опыта по комплектованию и эксплуатации судовых лебедок и кранов для высокопроизводительных грузовых механизмов подъема рекомендуются при средней высоте до 10 номинальные скорости 45 – 55 м/мин и при больших высотах – до 85 м/мин в зависимости от рода тока. В зарубежной практике встречаются скорости до 120 м/мин, что связано, например, со значительным увеличением пути перемещения грузов при спаренной работе судовых и береговых грузовых средств.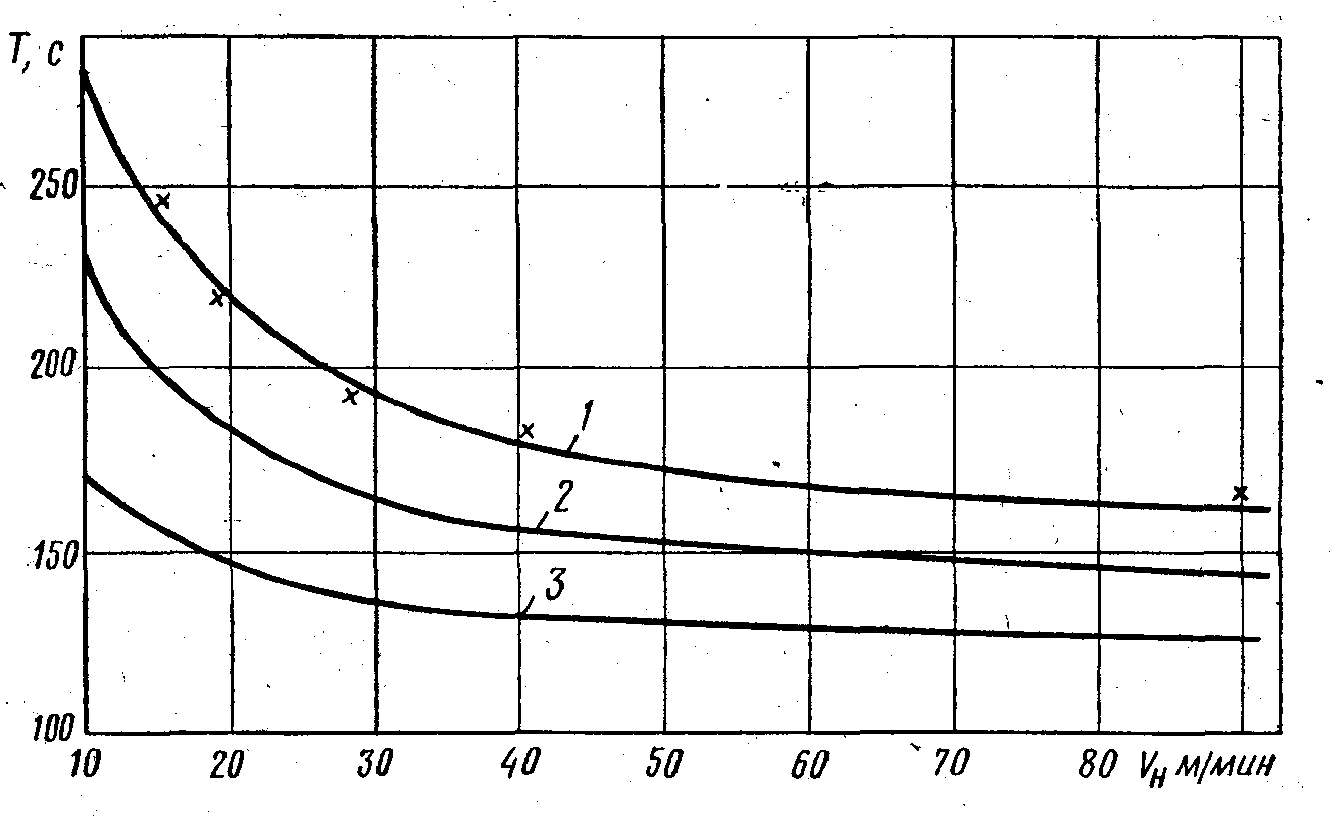 Рисунок 5 – Зависимость продолжительности цикла работы лебедки от номинальной скорости поднятия груза: 1 – суда грузоподъемностью 5 – 10 тыс. т, 2 – суда грузоподъемностью 2 – 3,7 тыс. т, 3 – суда грузоподъемностью 0,2 – 0,8 тыс. т. Широкое регулирование скорости обеспечивает возможность повышения производительности за счет использования полной мощности электропривода при перевалках неполных грузов и благодаря наиболее правильной организации грузовых работ. Подъем и спуск холостого, гака и легких грузов могут производиться с увеличенной скоростью. Целесообразен также спуск полного груза с повышенной скоростью. В практике работы нельзя идти на чрезмерное увеличение скорости спуска холостого гака, учитывая опасность появления слабины на барабане и запутывания шкентеля, так называемой его «дикой» намотки. Наоборот, скорость подъема холостого гака может быть значительно повышенной. Некоторые западные производители допускают увеличение этой скорости до пяти-шестикратного значения от нормальной величины. К таким скоростям, однако, следует относиться критически, учитывая затруднительность разгона двигателя до такой скорости и малое использование ее на ограниченном пути. С точки зрения технологии грузовых работ часто бывают необходимы малые скорости для подтягивания груза к просвету люка в трюме или к борту судна на пристани. Определенными нормами ограничиваются также так называемые посадочные скорости в целях предохранения от толчков и для сохранности грузов. Скорость посадки груза эквивалентна некоторой высоте его свободного падения, учитывая соотношение  . Приведем некоторые значения соответствующих эквивалентов (табл. 2). . Приведем некоторые значения соответствующих эквивалентов (табл. 2).
Таблица 2 – Соотношение скорости посадки и эквивалентной высоты свободного падения груза. Ряд грузов (лес, прокат, кожсырье, мешковые грузы) допускают высокие скорости посадки, не получая повреждений. Хрупкие и бьющиеся грузы (тонкие деревянные изделия, различные приборы и аппараты, стекло и фарфор) требуют особо осторожных посадок. В американской практике распространена посадочная скорость 6 м/мин, в западные производители – 9 – 18 м/мин. В отечественном судостроении практиковалась посадочная скорость 10 м/мин, в настоящее время она доведена до 15 м/мин, и существуют тенденции ее дополнительного повышения. В процессе грузовых работ бывают полезны быстрые переходы на большие скорости, например, при окончательном стравливании груза на назначенное место или для того, чтобы быстро провести груз в просвете люка для предотвращения удара о комингс при раскачивании. Существуют следующие принятые в среднем соотношения скоростей судовых лебедок в различных нагрузочных режимах: Скорость подъема полного груза – То же, половинного груз – (1,5 – 1,7) Скорость подъема холостого гака – (3 – 3,5) Скорость спуска – (2 – 2,5) Сокращение продолжительности переходных процессов является важным фактором повышения производительности лебедок, так как нормальный повторно-кратковременный режим работы сопровождается частыми пусками и остановками (до 500 включений в час, а в отдельных случаях и больше). Для убыстрения переходных процессов необходимо и целесообразно:
Наибольшие пусковые моменты вращения достигаются у асинхронных электродвигателей с повышенным скольжением и ограничиваются их паспортными данными. Применение менее быстроходных двигателей связано с увеличением их габаритов и маховых моментов. Таким образом, две последние рекомендации в отношении моментов инерции частей привода и частоты вращения исполнительного двигателя взаимно связаны и требуют оптимального решения. Полезно также учитывать, что более тихоходный двигатель уменьшает необходимое передаточное число механизма грузоподъемника и позволяет повысить его КПД. Оптимальное соотношение основных параметров электродвигателей для судовых грузовых лебедок нормируется ГОСТ 12617—67. Обеспечение сохранности груза При грузовых работах сохранность груза обеспечивается предотвращением возможностей свободной выдачи шкентеля с чрезмерным нарастанием скорости или, тем более, его обрыва, а также предотвращением ударов и недопустимых ускорений. Гарантированное удержание грузами его плавный спуск достигаются за счет надежного и автоматического действия механического тормоза с точной фиксацией остановки в нужных случаях, а также за счет устойчивых тормозных характеристик электропривода. Исключить обрыв шкентеля возможно при следующих условиях. Ограничение предварительного момента  при взятии груза с места. Иначе возможно, возникновение колебательного процесса и в неблагоприятном случае совпадения частот вынужденных и собственных колебаний системы груз – привод, появление резонанса и вероятный разрыв шкентеля. Природа возникновения колебаний сводится к следующему. Максимальное значение момента при ненатянутом тросе ведет к интенсивному разгону двигателя. Благодаря большой инерций неподвижного груза к тросу в момент исчезновения слабины прикладывается со стороны разогнанного двигателя повышенное динамическое усилие. Происходит упругое растяжение шкентеля и подрыв груза с места с большим ускорением. Одновременно из-за повышенной нагрузки электродвигатель притормаживается. Возникает ослабление троса. При этом с груза снимается усиленная тяга, а двигатель разгружается. Процесс начинает повторяться. Так, двигатель вновь разгоняется, а инерция замедленного груза вновь приводит к динамическому упругому растяжению шкентеля и т. д. В связи с этим должна предусматриваться соответствующая механическая характеристика предвключения с развитием исполнительным двигателем ограниченного предварительного стояночного момента . Только после натяжения шкентеля приложенную к нему силу допустимо увеличить так, чтобы он мог взять груз. при взятии груза с места. Иначе возможно, возникновение колебательного процесса и в неблагоприятном случае совпадения частот вынужденных и собственных колебаний системы груз – привод, появление резонанса и вероятный разрыв шкентеля. Природа возникновения колебаний сводится к следующему. Максимальное значение момента при ненатянутом тросе ведет к интенсивному разгону двигателя. Благодаря большой инерций неподвижного груза к тросу в момент исчезновения слабины прикладывается со стороны разогнанного двигателя повышенное динамическое усилие. Происходит упругое растяжение шкентеля и подрыв груза с места с большим ускорением. Одновременно из-за повышенной нагрузки электродвигатель притормаживается. Возникает ослабление троса. При этом с груза снимается усиленная тяга, а двигатель разгружается. Процесс начинает повторяться. Так, двигатель вновь разгоняется, а инерция замедленного груза вновь приводит к динамическому упругому растяжению шкентеля и т. д. В связи с этим должна предусматриваться соответствующая механическая характеристика предвключения с развитием исполнительным двигателем ограниченного предварительного стояночного момента . Только после натяжения шкентеля приложенную к нему силу допустимо увеличить так, чтобы он мог взять груз.Установка конечных выключателей для обеспечения в граничных положениях отключения электроприводов барабанов, навивающих тросы, как механизма подъема, так и механизма изменения вылета стрелы. Ограничение бросков механического момента исполнительного двигателя – тягового или тормозного при переключениях электропривода с одной позиции скорости на другую за счет обеспечения нужного подбора и использования промежуточных механических характеристик.
Высокая надежность работы достигается за счет повышенной механической, электрической и тепловой прочности всего оборудования. Наиболее тяжелыми являются грузовые работы, производимые в Арктике, в тропиках или при неблагоприятных метеорологических условиях. Надежность обеспечивается также за счет герметизации оборудования, так как оно расположено на открытых палубах и постоянно подвергается морским атмосферным воздействиям и возможности заливания водой. На современных, судах лебедки и посты управления устанавливаются, как правило, на возвышенных площадках. Не допускается размещение постов управления и рабочего места лебедчика против троса, навивающегося на барабан, а также под блоками, тросом и траекторией груза. Учитывая возможность угрожающих безопасности повреждений конструкций, у электропривода должны предусматриваться ручные выключатели, имеющие указатели и окрашенные в красный цвет. Оператор должен иметь хорошую видимость люка и по возможности всего фронта грузовых работ. Органы управления (маховики или рукоятки) должны быть выполнены так, чтобы вращение их по часовой стрелке или на себя соответствовало подъему или повороту вправо, а вращение против часовой стрелки или от себя – спуску или повороту влево. Высокие экономические показатели определяются простотой устройств, их компактностью, малыми массами и стоимостью. Экономичность электроприводов грузоподъемников зависит от КПД и коэффициента мощности. Необходимо, чтобы эти показатели были высокими и мало изменяющимися. Разнохарактерность грузов, имеющих часто большой объем при сравнительно небольшой массе (хлопок, войлок, шерсть, пробка), не позволяет использовать всегда полную грузоподъемность судовых лебедок и кранов. Известно, что средний коэффициент загрузки судовых грузоподъемников достигает  . В связи с этим необходимо, чтобы в широком диапазоне нагрузок значения КПД и . В связи с этим необходимо, чтобы в широком диапазоне нагрузок значения КПД и  исполнительного электродвигателя оставались примерно на одних уровнях, близких к их максимальным значениям. исполнительного электродвигателя оставались примерно на одних уровнях, близких к их максимальным значениям.
В соответствии с требованиями данными в теме дипломного проекта, относительно мощности электропривода, а также учитывая специфику грузового оборудования на судах класса Handymax, в качестве электропривода был выбран асинхронный, трёхскоростной электродвигатель марки АИР М 8/6/4. Ввиду не имения в каталогах электродвигателей имеющих возможность работать в повторно-кратковременном режиме со схожими характеристиками, был выбран выше представленный электродвигатель работающий в кратковременном режиме, что не критично, т. к. эти режимы работы во многом идентичны. Выбор трёхскоростного электродвигателя обусловлен тем, что во время грузовых операций требуется осторожность и манёвренность, чтобы не повредить груз. Ниже представлены паспортные данные электродвигателя для двух режимов работ:
nн1 = 1485 об/мин; Pн1 = 38 кВт;  = 0,9; = 0,9; = 91,5%; = 91,5%; = 2; = 2; = 342; = 342; = 478,8; = 478,8; = 752,4. = 752,4.
nн2 = 990 об/мин; Pн2 = 33 кВт;  = 0,84; = 0,84; = 91%; = 91%; = 3; = 3; = 294,2; = 294,2; = 558,99; = 558,99; = 764,92. = 764,92.
nн3 = 740 об/мин; Pн3 = 24 кВт;  = 0,73; = 0,73; = 88%; = 88%; = 4; = 4; = 274,6; = 274,6; = 466,82; = 466,82; = 576,66. = 576,66.Для оценки свойств асинхронного двигателя прибегают к построению механической характеристики. Механическая характеристика асинхронного двигателя выражает зависимость между электромагнитным моментом и частотой вращения, либо скольжением. Скольжение – это величина, которая показывает, насколько частота вращения магнитного поля опережает частоту вращения ротора. Благодаря механической характеристике, появляется возможность определить к какому типу установки больше подходит двигатель, на каком участке сохраняется его устойчивая работа, перегрузочную способность и другое. Построю механическую характеристику для двигателя АИР М 8/6/4. Строю рабочий участок механической характеристики асинхронного двигателя  по формуле Клосса: по формуле Клосса: (1) (1)Угловая скорость поля статора для высокоскоростного режима работы  : : (2) (2) Угловая скорость поля статора для среднескоростного режима работы  : : Угловая скорость поля статора для низкоскоростного режима работы  : : Скорость вращения ротора в высокоскоростном режиме  , тогда угловая скорость , тогда угловая скорость  : : (3) (3) Скорость вращения ротора в среднескоростном режиме  , тогда угловая скорость , тогда угловая скорость  : : Скорость вращения ротора в низкоскоростном режиме  , тогда угловая скорость , тогда угловая скорость  : : Скольжение в высокоскоростном режиме определяют из выражения вида:  (4) (4) Скольжение в среднескоростном режиме определяют из выражения вида:  Скольжение в низкоскоростном режиме определяют из выражения вида:  Критическое скольжение  определяю по формуле: определяю по формуле:  (5) (5)Где  – номинальное скольжение для высокоскоростного режима работы; – номинальное скольжение для высокоскоростного режима работы;  – перегрузочная способность, которая равна кратности критического момента – перегрузочная способность, которая равна кратности критического момента   Где  – номинальное скольжение для среднескоростного режима работы; – номинальное скольжение для среднескоростного режима работы;  – перегрузочная способность, которая равна кратности критического момента – перегрузочная способность, которая равна кратности критического момента   Где  – номинальное скольжение для низкоскоростного режим работы; – номинальное скольжение для низкоскоростного режим работы;  – перегрузочная способность, которая равна кратности критического момента – перегрузочная способность, которая равна кратности критического момента   Критическая скорость вращения ротора  : : (6) (6)Для высокоскоростного режима работы  : : Для среднескоростного режима работы  : : Для низкоскоростного режима работы  : : Значения моментов:    Согласно данным полученным выше по формуле 1 произвожу расчет рабочего участка механической характеристики от  до до  Угловую скорость асинхронного двигателя, советующую изменяющемуся скольжению, находим по формуле:  (7) (7) Для высокоскоростного режима : Для среднескоростного режима : Для низкоскоростного режима : По формуле 1, приведенной выше произвожу расчет рабочего участка естественной механической характеристики исполнительного двигателя привода .Таблица 1 – Расчетные данные для естественной механической характеристики  – высокоскоростного режима. – высокоскоростного режима.
Таблица 2 – Расчетные данные для естественной механической характеристики  – среднескоростного режима. – среднескоростного режима.
Таблица 3 – Расчетные данные для естественной механической характеристики  – низкоскоростного режима. – низкоскоростного режима.
По результатам расчётов Глава 2 строю механические характеристики исполнительного двигателя привода для низкоскоростного и высокоскоростного режимов (рисунок 6). При заданном значении момента сопротивления на валу  , также учитывая тот факт что для грузоподъёмных механизмов момент сопротивления на валу не зависит от скорости строю характеристику механизмов (рисунок 6) точки пересечения механических характеристик будут являться рабочими точками электропривода. , также учитывая тот факт что для грузоподъёмных механизмов момент сопротивления на валу не зависит от скорости строю характеристику механизмов (рисунок 6) точки пересечения механических характеристик будут являться рабочими точками электропривода.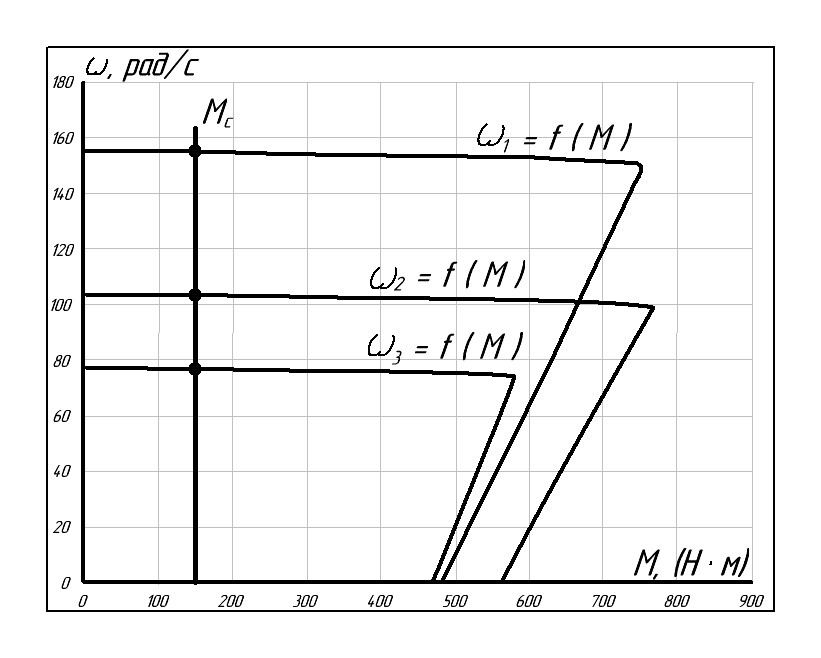 Рисунок 6 – графические пояснения к расчётам характеристик электропривода. 2.1 Выбор схемы электропривода Надежность работы электропривода определяется правильностью выбора аппаратуры защиты и управления. Правильный выбор аппаратуры позволяет надежно защитить электродвигатель в случае возникновения аварийных режимов работы, таких как режим перегрузки, короткого замыкания. При выборе компонентов схемы электропривода учитывались следующие требования: надёжность; ремонтопригодность; простота эксплуатации; износоустойчивость; экономичность; унификация компонентов; возможность замены. Схема управления электроприводом состоит из силовой части и схемы управления. Силовая часть схемы состоит из следующих элементов:
Схема управления состоит из следующих элементов:
Ниже представлено описание каждого компонента силовой части схемы:
Ниже представлено описание каждого компонента схемы управления:
|
 , м/мин
, м/мин , мм
, мм вращающихся частей электропривода (якоря ИД, муфт сцепления, тормозных дисков, барабанов, шестерен);
вращающихся частей электропривода (якоря ИД, муфт сцепления, тормозных дисков, барабанов, шестерен);

