тахогенератор. Оглавление Предисловие стр. 2 Принцип работы стр. 2 Тахогенераторы постоянного тока в схемах автоматики стр. 6 Достоинства и недостатки стр. 7 Список литературы стр. 8 Тахогенераторы постоянного тока Предисловие
 Скачать 0.51 Mb. Скачать 0.51 Mb.
|

|
Оглавление Предисловие ………………………………………………………стр.2 Принцип работы………………………………………………стр.2 Тахогенераторы постоянного тока в схемах автоматики………………………………………….стр.6 Достоинства и недостатки…………………………………………..стр.7 Список литературы…………………………………………..стр.8 Тахогенераторы постоянного тока Предисловие Уровень развития материальной культуры человеческого общества в первую очередь определяется созданием и использованием источников энергии. Применение пара, а в последние 100 лет электричества, совершило техническую революцию в промышленности и оказало решающее влияние на развитие социальных отношений. В настоящее время в наиболее развитых странах на одного человека приходится до 1О кВт всех видов энергии. Это примерно в 100 раз больше, чем мускульная мощность человека, которая еще 200 лет назад была основной в промышленности и сельском хозяйстве. С полным основанием можно считать, что сегодня технический и культурный уровень развития Государства определяется количеством электроэнергии, вырабатываемой на душу населения. Основой для создания электрических машин и трансформаторов явился открытый М. Фарадеем закон электромагнитной индукции. Начало практического применения электрических машин было положено русским академиком Б. С. Якоби, который в 1834 г. создал конструкцию электрической машины, явившуюся прототипом современного электродвигателя. Практическое применение трансформаторов началось в 1876 г., когда русский ученый П. Н. Яблочков впервые применил трансформаторы для питания изобретенных им электрических свечей. Широкому применению электрических машин в промышленности способствовало изобретение русского инженера М. О. Доливо-Добровольского (1889) трехфазного асинхронного двигателя, отличающегося простотой конструкции и высокой надежностью. К началу ХХ в. были созданы почти все виды современных электрических машин и разработаны основы их теории. Начиная с этого времени быстрыми темпами происходит электрификация промышленности и транспорта. Электрические машины малой мощности (микромашины), применяются в системах и устройствах автоматики и вычислительной техники в качестве функциональных элементов. Все электромашинные элементы автоматики разделяются на три группы: исполнительные двигатели, электромашинные усилители и информационные машины. Исполнительные двигатели осуществляют преобразование электрического сигнала в механическое перемещение, они могут быть асинхронными, постоянного тока и шаговыми. Электромашинные усилители служат для усиления мощности электрических сигналов. Информационные машины включают в себя тахогенераторы, сельсины, магнесины и вращающиеся трансформаторы. Эти машины служат для преобразования механических величин (угла поворота, частоты вращения или ускорения) в электрический сигнал или для передачи механического перемещения на расстояние. Принцип работы Тахогенератор постоянного тока - это машина постоянного тока с независимым возбуждением или возбуждением постоянными магнитами, работающая в генераторном режиме. По конструкции он почти не отличается от машин постоянного тока. Тахогенераторы постоянного тока служат для измерения частоты вращения по значению выходного напряжения, а также для получения электрических сигналов, пропорциональных частоте вращения вала в схемах автоматического регулирования. Основными требованиями, предъявляемыми к тахогенераторам, являются: а) линейность выходной характеристики; б) большая крутизна выходной характеристики; в) малое влияние на выходную характеристику изменения температуры окружающей среды и нагрузки; г) минимум пульсаций напряжения на коллекторе. На. рис. 9.5 показаны принципиальные схемы тахогенераторов постоянного тока с электромагнитным возбуждением (а) и возбуждением постоянными магнитами (б). В случае электромагнитного возбуждения обмотку возбуждения ОВ подключают к источнику постоянного тока (рис. 9.5, а). Тахогенератор возбуждается и если его якорь привести во вращение с частотой n, то на выходе генератора появится постоянное напряжение Uвых. Уравнение выходной характеристики тахогенератора имеет вид где rа - сопротивление обмотки якоря, Ом; Rн - внутреннее сопротивление прибора, подключенного к тахогенератору, Ом. 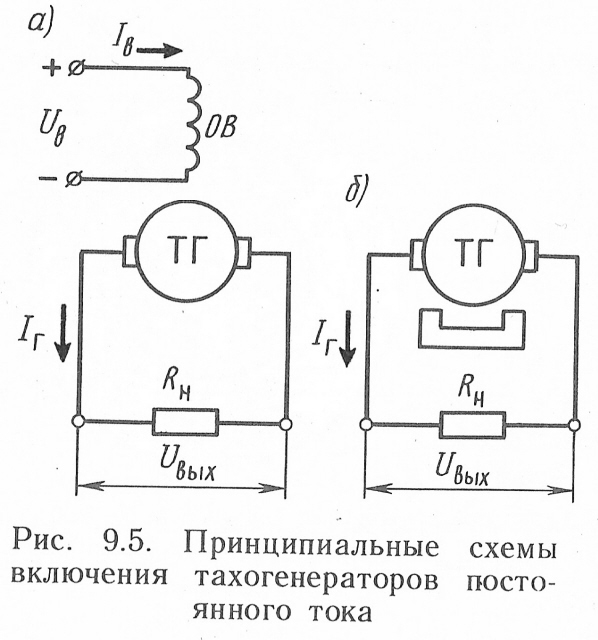 Если пренебречь падением напряжения в щеточном контакте ∆Uщ, то Из (2) следует, что чем больше сопротивление прибора Rн тем больше крутизна выходной характеристики Сu. Наибольшая крутизна у выходной характеристики, соответствующей режиму холостого хода тахогенератора, когда обмотка якоря разомкнута" (RH = ∞). С ростом тока нагрузки (уменьшением RH) крутизна выходной характеристики уменьшается (рис. 9.6, а). У современных тахогенераторов постоянного тока Сu = (6÷ 260).10¯³В/(об/мин), что превышает крутизну асинхронных тахогенераторов. Выходная характеристика тахогенератора постоянного тока - прямая линия. Однако опыт показывает, что выходная характеристика прямолинейна только в начальной части (при малых относительных частотах вращения), а с ростом частоты вращения она становится криволинейной (рис. 9.6, а). Криволинейность характеристики усиливается при уменьшении сопротивления нагрузки RH и увеличении частоты вращения n. Это объясняется размагничивающим действием реакции якоря в тахогенераторе. Для уменьшения криволинейности выходной характеристики не следует использовать тахогенератор на его предельных частотах вращения и применять в качестве нагрузки приборы с малым внутренним сопротивлением. В реальных условиях существует падение напряжения в щеточном контакте ∆Uщ, поэтому выходная характеристика тахогенератора выходит не из начала осей координат, а из точки на оси ординат, отстоящей от начала координат на Uщ = -[∆Uщ/(1 + rа/ RH)] (3) Это приводит к появлению у тахогенераторов постоянного тока зоны нечувствительности ε=±nmin, В пределах которой он не создает на выходе напряжения (рис. 9.6, 6). Для уменьшения зоны нечувствительности в тахогенераторах применяют щетки с небольшим значением ∆Uщ, т. е. с малым сопротивлением (медно-графитные или серебряно-графитные). В тахогенераторах высокой точности (прецизионных) используют щетки с серебряными или золотыми напайками. 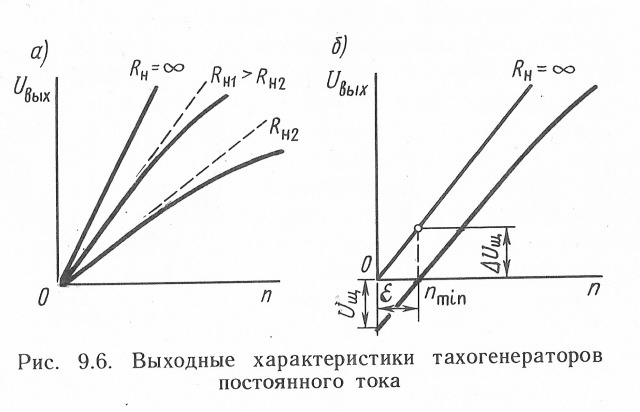 В тахогенераторах постоянного тока технологическая неточность установки щеток на геометрической нейтрали вызывает еще один вид погрешности-ассимметрию выходного напряжения, Она заключается в том, что величина выходного напряжения различна при вращении якоря с одинаковой частотой, но в противоположных направлениях. При сдвиге щеток с геометрической нейтрали возникает продольная составляющая потока якоря, которая при одном направлении вращения совпадает с потоком возбуждения, а при другом-противоположна ему. Следовательно, результирующий поток машины при обоих направлениях вращения будет различным, при этом различными будут э. д. с., индуктируемые в якоре. Асимметрию выходного напряжения вычисляют как отношение разности выходных напряжений при вращении якоря с номинальной частотой в обоих направлениях к полусумме этих напряжений. В зависимости от класса точности тахогенератора скоростная амплитудная погрешность при номинальной частоте вращения составляет ±(0,05-3) %, а ошибка асимметрии равна ±(1-3)%. Источником погрешности является также непостоянство магнитного потока обмотки возбуждения Фв. При электромагнитном возбуждении тахогенератора причиной этого может быть колебание напряжения UВ, подводимого к обмотке возбуждения, нагрев этой обмотки. В обоих случаях изменяется ток возбуждения IB что ведет к изменению потока Фв. Для уменьшения возможных колебаний потока Ф. магнитную систему тaxoгeнepaтора выполняют с сильным магнитным насыщением, т.е рабочую точку 1 на кривой намагничивания принимают за «коленом» насыщения магнитной системы. Из построений рис. 9.7, а видно, что изменение тока возбуждения Iв на ∆Iв1 в зоне точки 1 вызывает изменение потока возбуждения на ∆Фв1, значение изменений здесь намного меньше, чем в зоне точки 2, лежащей на прямолинейном участке кривой намагничивания, расположенном до «колена» насыщения (∆Фв1 <<∆Фв2). 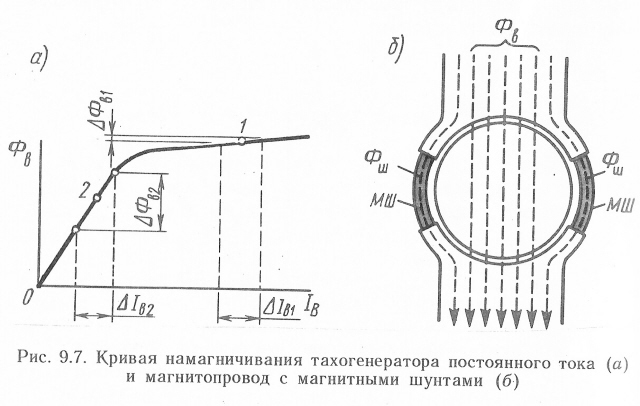 Сильное магнитное насыщение магнитной цепи тахогенератора не всегда целесообразно, потому что увеличивается объем обмотки возбуждения, а следовательно, габаритные размеры тахогенератора. В тахогенераторах с ненасыщенной магнитной системой для ограничения колебаний потока возбуждения Ф. последовательно в цепь обмотки возбуждения включают терморезистор, компенсирующий изменение сопротивления обмотки при колебаниях температуры, или применяют магнитные шунты МШ (рис. 9.7,б), изготовленные из сплава, изменяющего свое магнитное сопротивление при изменении температуры нагрева. Например, при нагреве обмотки возбуждения ее сопротивление увеличивается, ток Iв и поток Фв уменьшаются. Но при этом магнитное сопротивление шунтов увеличивается, что уменьшает поток Фш через шунты и увеличивает поток Фв. через полюс и якорь на величину, компенсирующую его уменьшение от изменения тока возбуждения. При снижении температуры процессы идут в обратном направлении. В итоге происходят лишь незначительные колебания потока возбуждения. Все причины, вызывающие отклонение выходной характеристики тахогенератора от прямолинейной, ведут к амплитудной погрешности. Тахогенераторы постоянного тока имеют амплитудную погрешность от 0,5 до 3%. В тахогенераторах постоянного тока возможна пульсация выходного напряжения, обусловленная рядом причин: зубчатой поверхностью сердечника якоря; неравномерностью воздушного зазора или неодинаковой магнитной проводимостью сердечника якоря по разным радиальным направлениям; вибрацией щеток и замыканием секций обмотки якоря в процессе коммутации; небольшим количеством секций в обмотке якоря из-за малых габаритных размеров машины Пульсации напряжения могут вносить помехи в работу автоматических устройств, элементом которых являются тахогенераторы. Пульсации напряжения можно ослабить за счет более качественной технологии изготовления тахогенеpaтopa с применением веерной сборки листов сердечника якоря (листы укладывают в пакет со сдвигом на однозубцовое деление), а также подключением сглаживающего фильтра на выход тахогенератора. Однако полностью избавиться от пульсаций не удается. Амплитуды пульсации выходного напряжения тахогенераторов постоянного тока составляют 0.1-3 % от среднего значения выходного напряжения. На работу тахогенератора оказывают влияние также пульсации выходного напряжения, обусловленные: 1) зубчатым строением якоря (зубцовые пульсации); 2) изменением магнитного потока за время одного оборота вследствие эллиптичности, эксцентриситета якоря или магнитной анизотропии его материала (якорные пульсации); 3) периодическим изменением числа секций в параллельных ветвях якоря; особенно при малом числе коллекторных пластин; 4) вибрацией щеток и замыканием накоротко части секций ТАХОГЕНЕРАТОРЫ постоянного тока В СХЕМАХ АВТОМАТИКИ Применение тахогенераторов постоянного тока в различных системах управления объясняется тем, что входным сигналом для большинства регуляторов в схемах автоматики является напряжение постоянного тока; тахометры с равномерными шкалами являются вольтметрами магнитоэлектрической системы и по существу измеряют напряжение постоянного тока, пропорциональное частоте вращения. В замкнутой системе регулирования тахогенераторы являются основным звеном контура обратной связи по частоте вращения. Часто считают, что тахогенератор — это безынерционное звено или (при наличии RС-фильтра для сглаживания пульсаций повышенной частоты) инерционное звено первого порядка с небольшой постоянной времени, определяемой RС-цепочкой фильтра. Более глубокие исследования, однако, показывают, что с учетом ∆UЩ и люфтов в подвижной передаче (муфты, зубчатые пары) узел тахогенератора становится нелинейным звеном, вызывающим автоколебания системы управления. При этом наиболее вредные низкочастотные пульсации напряжения на выходе узла тахогенератора в большей степени зависят от органических недостатков применяемых передач, чем от собственно тахогенератора как электрической машины. В системе автоматического управления под тахогенератором (ТГ) принято понимать комплекс устройств или узел между валом двигателя и входом усилителя. В приводах с тахогенераторами этот узел включает в себя устройство сочленения (муфту, зубчатую передачу), собственно тахогенератор, проводку до панели управления, а иногда также выходной трансформатор, фильтр и потенциометр. На рис.9.8 в качестве примера приведена простейшая структурная схема управляемого электропривода с обратной связью по частоте вращения. Схема управления предназначена для того, чтобы обеспечить частоту вращения механизма М пропорциональной неизменному эталонному напряжению или изменять ее пропорционально напряжению программного устройства ПУ. Для этого напряжение ТГ в устройстве сравнения УС сопоставляется с напряжением источника эталонного напряжения или программного устройства и их разность подается на усилитель, где она усиливается, как правило, двумя последовательными каскадами — предварительным усилителем У и усилителем мощности УМ, к которому подключен двигатель Д. Нетрудно заметить, что чем выше коэффициент усиления по напряжению и по мощности усилителей, тем меньшими должны быть разность напряжений и мощность, отдаваемая ТГ, которые необходимо подавать на вход У, чтобы обеспечить заданную частоту вращения, и тем точнее будет в 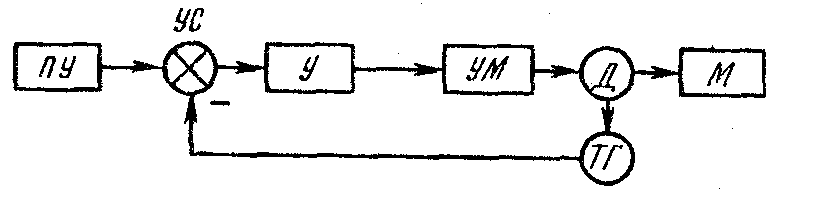 ыдерживаться пропорциональностью между частотой вращения и напряжением ПУ. Рис.9.8 Структурная схема управляемогоэлектропривода Достоинства и недостатки.Достоинства тахогенераторов постоянного тока по сравнению с асинхронными тахогенераторами: меньшие габаритные размеры и масса (в 2-3 раза) при большей выходной мощности; отсутствие фазовой погрешности; возможно возбуждение постоянными магнитами, что позволяет обойтись без источника питания для цепи возбуждения. Наряду с этим тахогенераторы постоянного тока имеют недостатки, ограничивающие их применение: сложность конструкции, высокую стоимость, наличие скользящего контакта между щетками и коллектором, что приводит к снижению надежности тахогенератора и к нестабильности выходной характеристики; наличие зоны нечувствительности; пульсация выходного напряжения; помехи радиоприему, для подавления которых в некоторых случаях приходится применять специальные меры. (Для подавления электромагнитных излучений применяют экранирование двигателя. В качестве экрана используют заземленный корпус двигателя. Если в подшипниковом щите со стороны коллектора имеются окна, то их закрывают металлической сеткой, соединенной с заземленным корпусом двигателя. Если корпус двигателя или его передний подшипниковый щит(со стороны коллектора) изготовлены из пластмассы, то неметаллическую часть двигателя закрывают сеткой и заземляют. Для подавления радиопомех, проникающих в электросеть, применяют симметрирование обмоток и включение фильтров. Симметрирование состоит в том, что каждую обмотку, включаемую последовательно в цепь якоря (обмотку возбуждения, обмотку добавочных полюсов и т. п.), разделяют на две равные части и присоединяют симметрично обмотке якоря, подключая к щеткам разной полярности. В качестве фильтров используют конденсаторы, включенные между каждым токонесущим проводом и заземленным корпусом двигателя. Значение емкости конденсаторов подбирают опытным путем. Конденсаторы должны быть рассчитаны на рабочее напряжение двигателя. Предпочтительнее применять проходные конденсаторы типа КБП, у которых один из зажимов металлический корпус, прикрепляемый непосредственно к статору двигателя и заземляемый вместе с ним. Часто конденсаторы фильтра располагают в коробке выводов двигателя.) Таким образом, любой вид тахогенератора имеет свои достоинства и недостатки. Поэтому при выборе тахогенератора необходимо исходить из конкретных условий его работы и требований, предъявляемых к тахогенератору со стороны автоматического устройства, для которого он предназначается. Широкое применение получили тахогенераторы постоянного тока, возбуждаемые постоянными магнитами. Эти тахогенераторы не имеют обмотки возбуждения, и поэтому они проще по конструкции и имеют меньшие габариты. В табл. 9.2 приведены технические данные некоторых тахогенераторов постоянного тока, изготавливаемых серийно отечественной промышленностью. 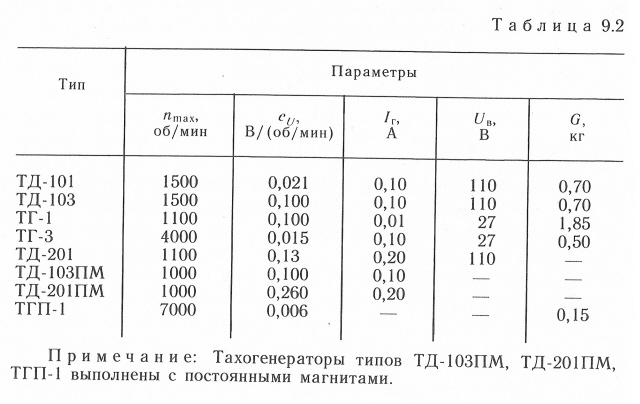 Список использованной литературы: И.П. Копылов “Электрические машины” 2004г. Д.Э. Брускин, А.Е. Зорохович, В.С. Хвостов “Электрические машины” 1979г. М. М. Кацман “Электрические машины”2000г. М. М. Кацман “Электрические машины и электропривод автоматических устройств” 1987г. Д. Э. Брускин “Электрические машины и микромашины” 1981г. |