пнд-4. курсовая. Описание пнд4
 Скачать 2.46 Mb. Скачать 2.46 Mb.
|

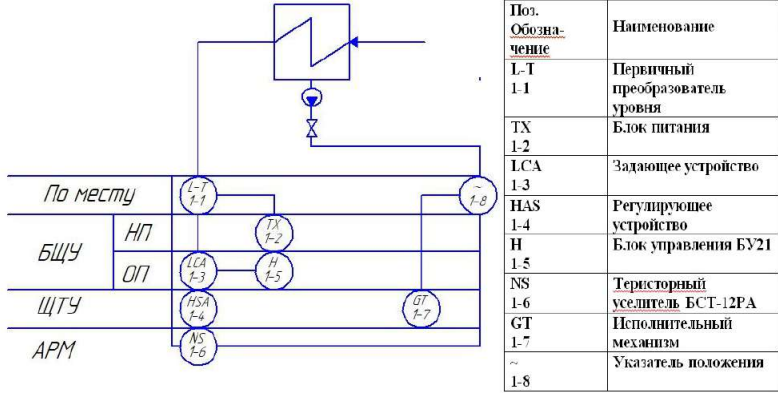
1.2 Конструкция. Принцип работыНа рисунке 1 приведена конструкция ПНД-4. Основные узлы подогревателя – водяная камера с патрубками для подвода и отвода питательной воды, перегородками внутри неё и фланцем, трубная система из U-образной трубой, диаметром 16 мм и толщиной стенки 1 мм, концы которых за вальцованы в трубной доске ( для организации потока пара имеются направляющие промежуточные перегородки), корпус подогревателя с приваренными к нему патрубками опорными лапками и фланцами. Трубная доска с помощью шпилек закрепляется между фланцем корпуса и водяной камеры. В подогревателе нагреваемая вода движется по теплообменным трубкам, а греющий пар поступает через пароподводящий патрубок в межтрубное пространство. Конденсат пара стекает в нижнюю часть корпуса и отводится из подогревателя через регулирующий клапан. 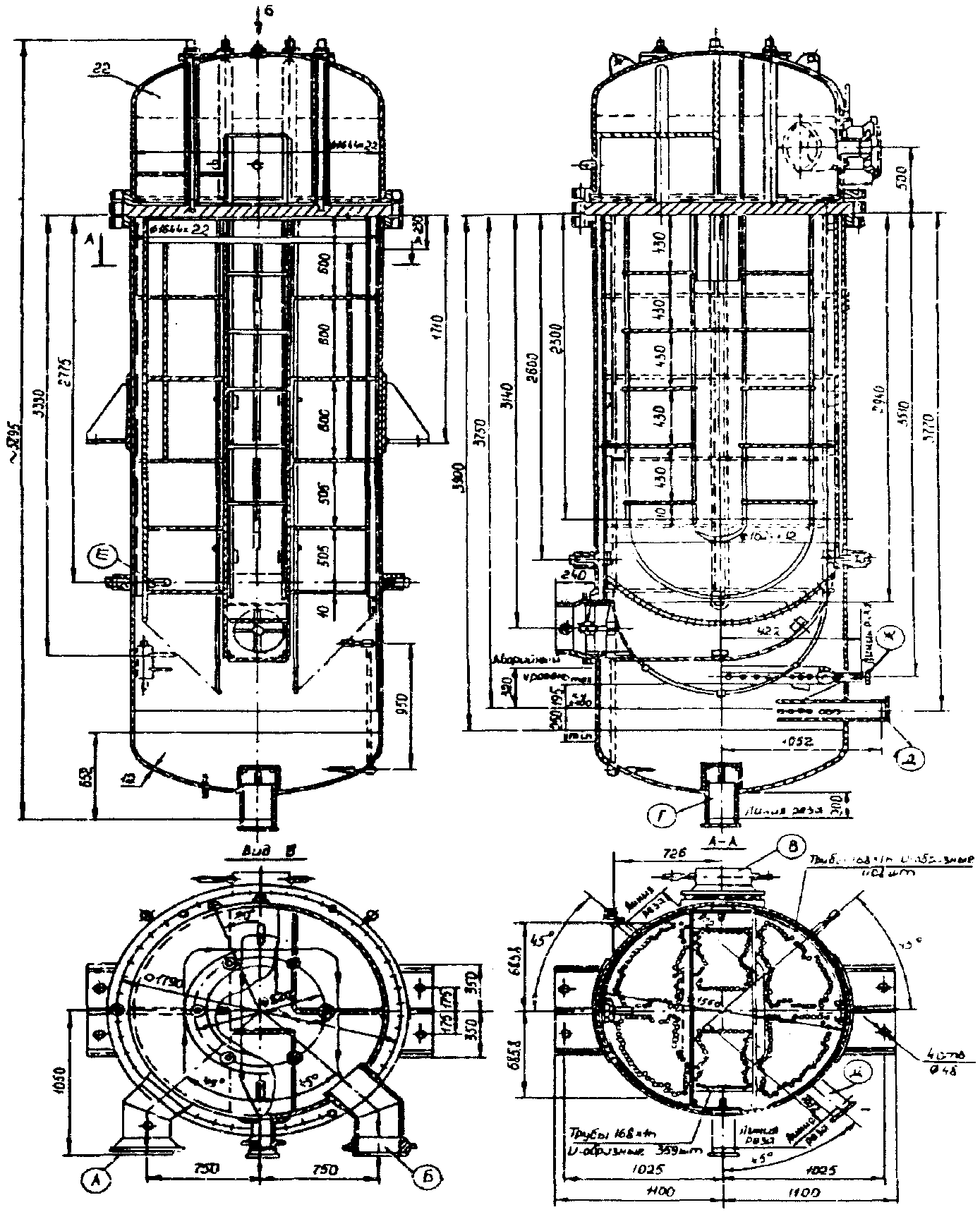 Рисунок 1 –ПНД: А- вход основного конденсата; Б- выход основного конденсата; В- подвод греющего пара; Г- отвод конденсата греющего пара; Д- подвод конденсата; Е- подвод парогазовой смеси; Ж- отвод парогазовой смеси Определение динамических характеристик объекта: С точки зрения регулирования уровня РОУ обладает свойствами самовыравнивания поэтому его динамические свойства описываются передаточной функцией. На рисунке 2 приведена кривая разгона.  Рисунок 2 – Кривая разгона Передаточная функция объекта регулирования имеет вид. W₀(p)=  e ˉᵖ ͭ e ˉᵖ ͭгде: К - Коэффициент усиления объекта; Т – Постоянная времени; t – Время запаздывания. T= 74,23 с t = 38,31 c x = 4,17 c y= 21,67 c  где: y – Установившиеся значение выходной величины; x – Регулирующее воздействие.  , (1) , (1)W₀(p)=  e ˉᵖ*³⁸⸴³ˡ , (2) e ˉᵖ*³⁸⸴³ˡ , (2)Щиты, штативы, пульты управления на функциональных схемах изображаются условно в виде прямоугольников произвольных размеров, достаточных для нанесения графических условных обозначений устанавливаемых на них приборов, средств автоматизации, аппаратуры управления и сигнализации. Комплектные устройства (машины централизованного контроля, управляющие машины, полукомплекты телемеханики и др.) обозначаются на функциональных схемах также в виде прямоугольника с указанием внутри него типа устройства. На рисунке 3 приведена функциональная схема контроля уровня в ПНД-4. Обоснование выбранной схемы автоматического регулирования: Пар вводится в корпус через патрубок, конденсируется на трубах поверхности теплообмена, а некоторая часть его совместно с неконденсирующимися газами (воздухом) выводится через полукольцевую перфорированную трубу. Повышение уровня конденсата греющего пара в подогревателях уменьшает поверхность теплообмена, что приводит к недогреву питательной воды и снижению коэффициента полезного действия энергоблока. Чрезмерно высокий уровень может привести к попаданию воды в систему отсоса паровоздушной смеси или даже к её вскипанию и забросу пароводяной смеси в проточную часть турбины и, как следствие, вызвать аварию. Поддержание уровня конденсата в корпусе ПНД в заданных пределах осуществляется автоматическим регулятором уровня, исполнительным органом которого является регулирующий клапан, устанавливаемый на трубопроводе выхода конденсата из подогревателя. |