КР Анисимов В.Р.. Оптимизация компоновки рулевой штанги
 Скачать 283.65 Kb. Скачать 283.65 Kb.
|

|
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ федеральное государственное автономное образовательное учреждение высшего образования «Северный (Арктический) федеральный университет имени М.В. Ломоносова» ________________Высшая инженерная школа___________________ (наименование высшей школы / филиала / института / колледжа) КУРСОВАЯ РАБОТА
А  рхангельск 2021 рхангельск 2021МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ федеральное государственное автономное образовательное учреждение высшего образования «Северный (Арктический) федеральный университет имени М.В. Ломоносова» Высшая инженерная школа  15.04.02 Технологические машины и оборудование 15.04.02 Технологические машины и оборудованиеМагистерская программа: Эксплуатационный инжиниринг транспортных и технологических машин Задание на курсовую работу по дисциплине «Моделирование параметров и процессов технологических машин» По теме: «Оптимизация компоновки рулевой штанги пешеходного минитрактора 2К2 (мотоблока)» Введение. Анализ состояния вопроса по проблемам эргономического соответствия машины и человека. Представить математическую модель системы «минитрактор 2К2+технологическая машина+ человек-оператор» с компоновочной схемой для оптимизации базовых компоновочных параметров, определяющих минимум энергоемкости движения человека-оператора при выполнении работы. Рассчитать предложенную математическую модель с использованием компьютерной программы NIR1. По результатам компьютерного моделирования для своего варианта построить по оптимальному решению суставных углов соматографическая схему (в масштабе) оператора без мотоблока при движении за мотоагрегатом (представить в пояснительной записке). При этом использовать рисунок из задания и рис.1 из Методических материалов «Оптимизация компоновки рулевой штанги мотоблока и обоснование диапазонов ее эргономических регулировок». На формате A3 выполнить компоновочную схему системы «мотоагрегат+оператор» по полученным оптимальным результатам исследования, соблюдая масштаб (размерность). За прототип агрегата взять экспериментальные образцы мотоблока 2К2 «Сиверко» и прицепного плуга ка нему (образцы в лаборатории ЛТМ). Исходные данные: Тяговый модуль агрегата - экспериментальный мотоблок «Сиверко». Экспериментальный прицепной плуг.  Вектор базовой точки суставных углов (рис.1 - «Оптимизация компоновки рулевой штанги мотоблока и обоснование диапазонов ее эргономических регулировок») (в радианах): C7 (ρ =); C8 (ɣ=); C9 (β=). Коэффициент редукции оптимального поиска V4=2. Исходный масштабный множитель оптимального поиска V5=1. Точность оптимального поиска V7=0,0001. Масса человека - оператора (кг) M=90. Рост человека - оператора (м) R=1,87. Коэффициент сопротивления движению (шаганию) человека - оператора F=0,09. Ускорение свободного падения g=9.81 м/c2. Скорость движения (шагания) человека – оператора (м/с) V1=1,4. Руководитель работы, д.т.н., профессор ____________ Д.Г.Мясищев «______» _________2021 г. Проект выполнил студент Котцова Ольга Александровна « ___»___________2021 г. ______________ ________________ЛИСТ ДЛЯ ЗАМЕЧАНИЙ ОГЛАВЛЕНИЕВведение 6 1Оптимизация компоновки рулевой штанги мотоблока и обоснование диапазонов ее эргономических регулировок 7 2Расчетная часть 12 Заключение 14 ПРИЛОЖЕНИЕ А (обязательное) Соматографическая схема человека-оператора мотоблока 15 ВведениеНеобходимость решения огромного количества задач, которые поставлены перед мировым сообществом на данный момент, поспособствовало развитию больших сложных систем. Сложно понять, было ли управление проектами разработано из-за необходимости менеджеров в технике управления такими проблемами. Однако нет сомнения в том, что в наше время комплексные проблемы обязывают нас объединять усилия многих отраслей. Именно управление проектами обеспечивает нужный подход к решению комплексных проблем. При определении необходимости в управлении проектами можно увидеть некоторые основные предпосылки. Каждая организация производит продукт или предоставляет услуги или же делает и то, и другое. Все организации хотят работать так, чтобы их товары или услуги были предоставлены в нужное время с минимальными затратами и привели бы к максимально возможному удовлетворению потребителя (заказчика). Неудачи в достижении этих целей ведут к негативным последствиям для организации. В последние годы коренные изменения в технологии и глобальной конкуренции стали особенно очевидными и ощутимыми. Бизнес стал более эффективным и динамичным. Поэтому умение успешно осуществлять проекты с минимальными затратами позволяет компании существенно увеличить свою конкурентоспособность на рынке. Оптимизация компоновки рулевой штанги мотоблока и обоснование диапазонов ее эргономических регулировокПри управлении мотоблоком, агрегатированным с почвообрабатывающими орудиями, оператору приходится длительное время двигаться за машиной, не меняя своей позы, осуществляя при этом технологический процесс. В таком положении значительную долю энергозатрат человека составляет статическая физическая работа, которая по напряжению в 5 раз больше динамической работы и требует в 3-4 раза больше времени на восстановление энергии организма. Отсюда следует, что определяющую роль в уменьшении энергозатрат оператора при следовании за почвообрабатывающим агрегатом играет положение его тела относительно рукояток рулевой штанги мотоблока. Очевидно, что в этом случае необходимо стремиться к минимизации физической работы машиниста. Из эргономики известно, что при обосновании рациональной позы человека– субъекта технической системы (водитель самоходной машины, пилот летательного аппарата и др.) используется принцип соматографии. Он состоит в том, что тело человека представляется в виде шарнирно-сочлененной плоской фигуры. При этом определяющими параметрами идеализированной схемы являются три суставных угла: плечо – предплечье, голень – бедро, позвоночник – тазовая область. Такой подход позволяет выбрать в конечном итоге необходимые диапазоны эргономических регулировок места расположения человека, в зависимости от его антропометрических данных. Изложенные предпосылки позволяют сформулировать следующую оптимизационную задачу. Заданы: выполняемая технологическая операция и условия осуществления; конструктивные параметры мотоблока и его рабочего оборудования; антропометрические и физиологические данные оператора. Требуется: среди множества возможных конфигураций соматографической схемы фигуры человека– машиниста при выполнении технологического процесса выбрать такую конфигурацию, при которой затрачивается минимум физической работы человека; на основе антропометрии человеческого тела определить параметры компоновки штанги управления мотоблока, при которых обеспечивается минимум выбранного показателя качества; обосновать оптимальные диапазоны эргономических регулировок положения устройств управления. Таким образом, схематизация задачи следующая  (1) (1)где А – целевая функция (показатель качества) – физическая работа оператора;  значения управляемых переменных (суставные углы), соответствующие минимуму целевой функции; значения управляемых переменных (суставные углы), соответствующие минимуму целевой функции;Х – область решения; р = 1, 2, 3. В основу математического описания задачи положен ряд расчетных схем в которых плоская многомассовая модель человека – оператора представлена по принципам соматографии. Ввиду громоздкости промежуточных геометрических, тригонометрических и алгебраических преобразований, а также многочисленности фрагментарных расчетных схем, ниже приводятся обобщения и итоги математического моделирования. На рис. 1 представлена результирующая расчетная соматографическая схема машиниста.  Рисунок 1.1 – Соматографическая схема человека-оператора мотоблока В математической модели аналитически оценивались следующие физические энергозатраты оператора. Все энергетические показатели приведены к одному шагу человека. Физическая работа А1 на возвратно-поступательное перемещение массы М тела в вертикальной плоскости при движении нормальным шагом за мотоорудием А1 = а1GчНчФ1Sin (Ф2), (2) где Gч – сила тяжести экипированного оператора при работе, Н; Нч – полный рост человека, м; Ф1 = [а2 а3 Sin a4(1 + a5Cos)(1 a6Sin)0,5 + a7Сos ]0,5;  ; ; ; ; . .Затраты А2, А3 и А4 энергии на удержание масс М, Мп и Мпп в отклоненном от статического положении, за последнее принято состояние покоя стоящего человека: А2 = а10GчНч(1sin ); (3) А3 = а12GчНчSin(1cos ); (4)  , (5) , (5)где , и суставные углы соматографической плоской модели человеческого тела;  . .Работа А5 на преодоление сопротивления движению при ходьбе с учетом переноса массы Мр на рукоятки А5 = |а18GчНч(1F1)fч|, (6) где  ; ;fч – коэффициент сопротивления движению человека при ходьбе; = 900 + + ;  . .Работа А6, эквивалентную кинетической энергии человека при движении  , (7) , (7)где V – поступательная скорость мотоблока, м/с. Затраты А7 энергии на поддержание части массы тела на рукоятках штанги управления при опоре на них рук оператора  . (8) . (8)Таким образом, детерминированная математическая модель позволяет определить скалярную целевую функцию оптимизационной задачи, приведенную к одному шагу мышечную работу оператора при движении за мотоблоком с почвообрабатывающим орудием  , (9) , (9)где j – порядковый номер оцениваемой составляющей энергозатрат человека. Расчетная схема позволяет определить интересующие нас компоновочные параметры Вр и Кр (рис.1), обеспечивающие привязку рукояток рулевой штанги к мотоблоку, в зависимости от антропометрии оператора и конструкции базового шасси:  ; (10) ; (10) , (11) , (11)где вш и ш – заданные постоянные величины, определяющие положение рабочего оборудования относительно базового шасси и безопасную зону для передней ноги оператора при движении, соответственно. Скалярная целевая функция А представляет собой нелинейные зависимости от управляемых переменных , и . Предварительные исследования характера поверхности целевой функции позволили сделать вывод о том, что данный показатель качества имеет по крайней мере один локальный минимум в практически реализуемых диапазонах варьирования управляемых переменных. Этот результат сузил сферу приемлемых для решения данной задачи подходов до методов безусловной оптимизации, например прямого поиска. Поэтому рассматриваемая проблема может быть классифицирована как монокритериальная задача нелинейного программирования при нелинейном характере целевой функции и отсутствии функциональных ограничений. Расчетная частьВ качестве исходных данных человека принят реальный на практике диапазон антропометрических показателей оператора. Параметры тела Н=1,87 м. G = 900 Н. Остальные исходные величины: fч = 0,09, V= 1,4 м/с, вш = 1,05 м, ш = 0,2 м. Ввод данных и результаты вычислений показаны на рисунке 2.1. 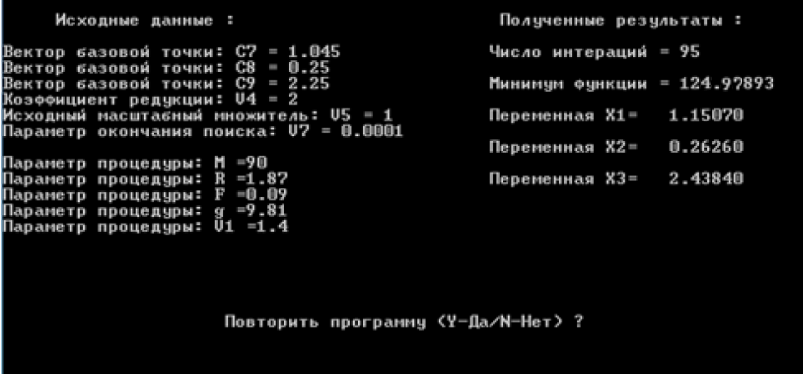 Рисунок 2.1 – Результаты расчета в программе NIR1 Следует отметить, что именно для введенных антропометрических данных значение суставных углов равно: = 139,230, = 65,890 и = 15,010. Минимальные значения целевой функции А=124,98 Дж. Для оценки корректности полученных количественных показателей, целесообразно найденные значения А пересчитать от одного шага, например, к часу движения за мотоорудием, а итоговые величины сравнить с существующими физиологическими данными ходьбы человека. Для выбранной скорости мотоблока V = 1,4 м/с ( 5 км/ч) имеем в течение часа А = 12,4105 Дж (энергетический эквивалент 295 ккал). Известно, что при ходьбе человека со скоростью 5 км/ч нормальным шагом расход энергии составляет 190…300 ккал/ч. Значит можно констатировать, что количественные оценки, полученные по изложенной методике, достаточно хорошо согласуются с существующими в физиологии человека данными. ЗаключениеАнализ многочисленных расчетных результатов показал, что полный рост оператора Нч, при прочих равных условиях, является определяющим фактором для нахождения оптимальной компоновки рулевой штанги мотоблока и ее регулировочных диапазонов. Поэтому в инструкции по эксплуатации мотоблока возможно представить информацию, например в табличной форме или в виде номограммы, где в зависимости от роста машиниста приведены соответствующие рекомендуемые настройки штанги и рукояток управления. Полученные результаты указывают на возможность иметь положительный эргономический эффект от использования предлагаемой методики при проектировании устройств управления мотоблоков. На формате A4 выполнена компоновочная схема системы «мотоагрегат+оператор» по полученным оптимальным результатам исследования, соблюдая масштаб (размерность). За прототип агрегата взять экспериментальный образцы мотоблока 2К2 «Сиверко» (приложение А). ПРИЛОЖЕНИЕ А | ||||||||||||||||||||||||||||||||||||||||||