практика. Отчет по практике. Ориентирование в программнотехническом обеспечении микропроцессорных систем
 Скачать 359.36 Kb. Скачать 359.36 Kb.
|

|
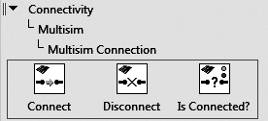
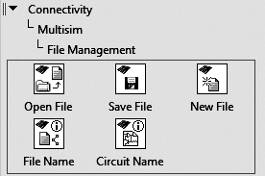
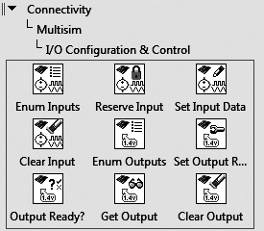
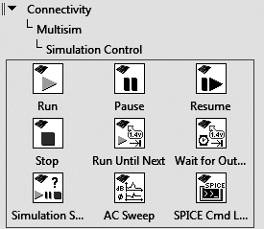
учебная практика проходила с _________________ в должности специалиста группы по эксплуатационному обслуживанию технических средств охраны.. Целью учебной практики являлось закрепление имеющихся теоретических знаний, возможность их применения в области контроля и метрологического обеспечения средств и систем атоматизации. Для достижения поставленной цели необходимо было решить следующие задачи: пользование измерительной техникой, различными приборами и типовыми средствами автоматизации; проведение поверок и настройки приборов, снятие характеристик и произведение подключения приборов; ориентирование в программно-техническом обеспечении микропроцессорных систем; обеспечение выбора элекментов автоматики для конкретной системы управлдения, исполнительных элекментов и устройст мехатронных систем. Под термином «автоматизация» понимается совокупность методических, технических и программных средств, обеспечивающих проведение процесса измерения без непосредственного участия человека. Автоматизация является одним из основных направлений научно-технического прогресса. Цели автоматизации: 1) Научные: - Повышение эффективности и качества научных результатов за счет более полного исследования моделей. - Повышение точности и достоверности результатов исследований за счет оптимизации эксперимента. - Получение качественно новых научных результатов, невозможных без ЭВМ. 2) Технические: - Повышение качества продукции за счет повторяемости операций, увеличения числа измерений и получения более полных данных о свойствах изделий. - Повышение надежности изделий за счет получения боле полных данных о процессах старения и их предшественниках. 3) Экономические: - Экономия трудовых ресурсов за счет замены труда человека трудом машины. - Сокращение за трат в промышленности за счет уменьшения трудоемкости работ. - Повышение производительности труда на основе оптимального распределения работ между человеком и машиной и ликвидации неполной загрузки при эпизодическом обслуживании объекта. 4) Социальные: - Повышение интеллектуального потенциала за счет поручения рутинных операций машине. - Ликвидация случаев занятости персонала операций в нежелательных условиях. - Освобождение человека от тяжелого физического труда и использование сэкономленного времени для удовлетворения духовных потребностей. Самым мощным средством в интенсификации труда практически во всех сферах человеческой деятельности является широкое применение средств вычислительной техники. Обобщенная структурная схема СИ, присущая любому измерительному прибору, устройству, системе, приведена на рис. 1.1. Анализ этой схемы приводит к определению основных задач автоматизации. 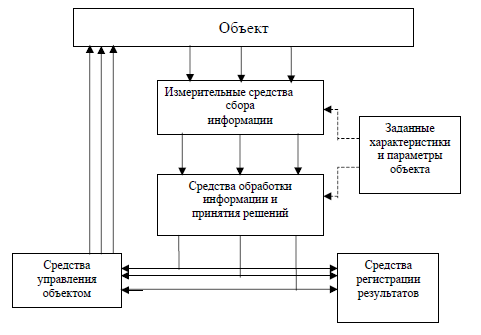 Рис.1.1 Обобщенная структурная схема средств измерений При автоматизации сбора измерительной информации необходимо обеспечить: - унификацию выходных сигналов измерительных преобразователей; - программно-управляемую коммутацию сигналов на общий канал связи; - автоматический выбор диапазонов измерений. При автоматизации операций измерительной цепи (канала) необходимо обеспечить: - прием информации; - фильтрацию; - усиление; - аналого-цифровое преобразование. При автоматизации передачи информации в ЭВМ необходимо обеспечить: - согласование измерительной цепи с информационной магистралью вычислительной устройства (интерфейс). Интерфейс определяет формат передаваемой и принимаемой информации, уровни сигналов, организацию управляющих сигналов и т.д. Автоматизация обработки измерительной информации предполагает: - включение в измерительную цепь вычислительных средств (серийно выпускаемых ЭВМ); - разработку специализированных средств на базе микропроцессорных средств. 2. Автоматизация измерительного процесса Необходимость измерения огромного количества разнообразных физических величин потребовала разработки средств измерений, позволяющих получать необходимую информацию без непосредственного участия человека, т.е. выполняющих измерения автоматически. Автоматизация позволяет обеспечить: - сбор измерительной информации в местах, недоступных для человека; - длительные, многократные измерения; - одновременное измерение большого числа величин; - измерение параметров быстропротекающих процессов; - измерения, характеризующиеся большими массивами информации и сложными алгоритмами ее обработки. Следует различать полную и частичную автоматизацию. Процесс измерения, при котором обратная связь управления осуществляется без участия человека называется автоматическим. Если оператор является одним из звеньев в цепи получения измерительной информации – речь идет об автоматизированных измерениях. Автоматизация измерений не принижает роль исследователя, инженера или техника, планирующих и использующих результаты измерений. Наоборот, она повышает производительность их труда, требует от них более высокого уровня знаний не только средств измерений но и тех задач, которые решаются при приеме и обработке измерительной информации, умения заложить оптимальную программу измерений и дать правильное толкование результатов измерения. Автоматические средства измерений в процессе своего развития прошли ряд этапов становления. На первом этапе развития автоматизации подвергались лишь средства сбора измерительной информации и ее регистрации на аналоговых индицирующих и регистрирующих устройствах. Обработку результатов измерений и выработку соответствующих решений и исполнительных команд осуществлял оператор. В подобных системах управления объектом средства измерений представляли собой набор отдельных измерительных приборов. В результате при измерении большого числа параметров объекта оператор был не в состоянии охватить всю полученную информацию и принять оптимальное решение по управлению объектом. Это приводило к расширению штата обслуживающего персонала, к снижению надежности и качества управления и возрастанию эксплуатационных расходов. На втором этапе все возрастающие требования к средствам измерений, обусловленные интенсификацией потоков измерительной информации, привели к созданию информационно – измерительных систем. В отличие от измерительного прибора информационно – измерительная система обеспечивает измерение большого количества параметров объекта и осуществляет автоматическую обработку получаемой информации с помощью встроенных в систему вычислительных средств. В задачу оператора системы управления теперь стали входить только принятие решений по результатам измерений и выработка команд управления. Централизованный сбор информации и ее обработка с помощью средств вычислительной техники резко повысило производительность труда, но не освободило его от ответственности за управление объектом, обслуживаемого системой. На третьем этапе развития появились информационно-управляющие системы и информационно – вычислительные комплексы, в которых осуществляется полный замкнутый цикл обращения информации от ее получения до обработки, принятия соответствующих решений и выдачи команд управления на объект без участия оператора. Главное достоинство таких систем заключается в том, что алгоритм работы систем стал программно – управляемым, легко перестраиваемым при изменении режимов работы или условий эксплуатации объекта. Труд оператора сводится к диагностике состояния системы управления, разработке методик измерения и программ функционирования. Выделение этапов развития СИ является приближенным и зависит от тех направлений науки и техники, в которых исследуются вопросы применения измерительной техники. 3. Обобщенные структурные схемы процессов измерения и контроля 3.1 Схема процесса измерения и ее анализ с точки зрения автоматизации Типовая схема автоматизированных измерений изображена на рис. 3.1. Объектом измерения может быть некоторый процесс, явление или устройство. Измеряемые величины воспринимаются датчиками, с выходов которых электрические сигналы поступают на коммутатор. Коммутатор повышает коэффициент использования измерительной установки при многоканальных измерениях. Опрос датчиков может быть циклическим (параметры однородны и стационарны), программным (параметры стационарны, но неоднородны) или адаптивным (параметры нестационарны). Электрический сигнал с выбранного коммутатором датчика преобразуется в цифровой код в АЦП. Интерфейс обеспечивает сопряжение измерительного канала с ЭВМ. Далее измерительная информация подвергается обработке по заданной программе в ЭВМ и представляется в удобной форме на экране дисплея или отпечатанной на бумаге. База данных (БД) предназначена для хранения необходимой измерительной и справочной информации. 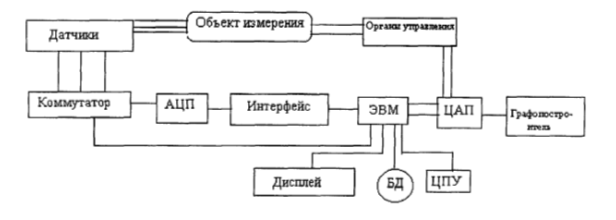 Рис. 3.1. Обобщенная структурная схема процесса автоматизированного измерения ЦАП используется для двух целей: представление результатов измерений в аналоговой форме с дальнейшим их преобразованием в графическую форму и преобразования команд ЭВМ в аналоговые сигналы с целью управления объектом измерений. Канал управления позволяет активно воздействовать на объект (нагревать, охлаждать, облучать, деформировать, перестраивать), следя одновременно за реакцией его на эти воздействия. Наличие ЭВМ позволяет производить вычислительный эксперимент. 3.2 Процесс контроля и возможности его автоматизации Процесс контроля сводится к проверке соответствия объекта установленным техническим требованиям. Сущность контроля (ГОСТ 1650 – 81) заключается в проведении двух основных операций: - получение информации о фактическом состоянии объекта, о признаках и показателях его свойств (первичная информация); - сопоставление первичной информации с заранее установленными требованиями, нормами, критериями ( вторичная информация). Заранее установленные требования к объекту контроля могут быть представлены в виде образцового изделия или в виде перечня определенных параметров и их значений с указанием полей допуска. Граничные значения областей состояния контролируемого параметра называют нормами. 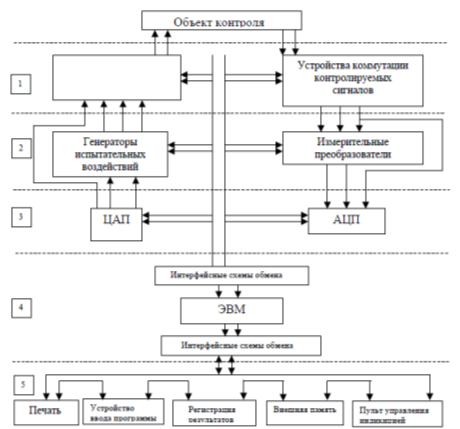 Рис.3.2. Обобщенная структурная схема системы автоматического контроля Отличие измерения и контроля состоит в том, что при измерении измеряемую величину сравнивают с единицей определенной физической величины с целью получения количественной информации, а при контроле физический параметр сравнивают с его нормой с целью определения отклонений данного параметра (качественная характеристика объекта – “годен”-“не годен”). Совокупность технических средств, с помощью которых выполняются операции автоматического контроля, называются системами автоматического контроля (САУ). Данные системы являются одним из основных звеньев САУ и автоматизированных систем управления технологическими процессами (АСУТП). На рис. 3.2 приведена обобщенная структурная схема системы автоматического контроля. Кратко рассмотрим основное назначение составных частей, входящих в эту систему. Подсистема коммутации и связи – служит для непосредственного подключения системы к объекту контроля. Она может осуществляться с помощью проводных или кабельных линий, либо использования высокочастотного радиоканала. В состав подсистемы входят устройства коммутации контролируемых и стимулирующих сигналов. Подсистема ИП и генераторов испытательных воздействий – содержит преобразователи различных физических величин, нормализаторы их выходных сигналов в унифицированные электрические сигналы, а также генераторы испытательных сигналов, формирующие воздействия на объект контроля. Подсистема согласующих преобразователей - состоит из преобразователей унифицированных аналоговых сигналов в код (АЦП – для сигналов напряжения, тока и частотно-цифровые – для частотных сигналов) и обратных преобразователей «код – аналог» для формирования испытательных воздействий. Операционная подсистема – представляет собой специализированную ЭВМ, которая может быть выполнена на микропроцессорных комплексах БИС. Подсистема ввода – вывода – включает устройства, обеспечивающие связь оператора с системой (пульт управления, дисплей, электрические пишущие машины и др.), устройства регистрации информации, внешние долговременные запоминающие устройства, а также средства подготовки и ввода программ, например, программ управления ЭВМ ( загрузчики, ассемблеры, редакторы, монитор и т.д.). Принципы сопряжения ЭВМ с другими подсистемами основаны на применении стандартных каналов передачи данных. 4. Базовые элементы технического обеспечения автоматических систем измерений и контроля 4.1 Измерительные преобразователи Измерительный преобразователь (ИП) – техническое средство с нормированными метрологическими характеристиками, служащее для преобразования измеряемой величины в другую величину или измерительный сигнал, удобный для обработки, хранения, дальнейших преобразований или передачи (РМГ 29-99). В зависимости от назначения ИП делятся на масштабные, служащие для изменения значения величины в заданное число раз, и преобразователи рода величины: преобразователи электрических величин в электрические величины (электрическая величина – в цифровой код; напряжение – в частоту); неэлектрических величин в электрические (терморезисторы, термопары, тензодатчики); магнитных величин в электрические (индукционные, гальванометрические преобразователи); электрических величин в неэлектрические (измерительные механизмы электромеханических приборов). По месту, занимаемому в измерительной цепи, ИП делятся на первичные, промежуточные и т. д. На первичный ИП непосредственно воздействует измеряемая физическая величина (ФВ).  Рис. 4.1. Измерительная цепь Конструктивно ИП выполняются либо в виде отдельных блоков, либо являются составной частью СИ. 4.1.1 Классификация измерительных преобразователей Измерительные преобразователи классифицируют по роду измеряемой ФВ (температуры, давления, влажности и др.) и по выходной величине (генераторные, параметрические). Выходным сигналом генераторных датчиков является ЭДС, напряжение, ток или электрический заряд, функционально связанные с измеряемой величиной. В параметрических преобразователях выходной величиной является изменение параметра электрической цепи (R, L, C). Генераторные измерительные преобразователи: 1) Термоэлектрические преобразователи (термопары); 2) Пьезоэлектрические преобразователи. Параметрические измерительные преобразователи 1) Термометры сопротивления; 2) Тензочувствительные преобразователи (тензорезисторы); 3) Индуктивные преобразователи. 4.2 Операционные усилители Операционный усилитель (ОУ) - это дифференциальный усилитель постоянного тока с очень большим коэффициентом усиления. Для усилителя напряжения передаточная функция (коэффициент усиления) определяется выражением  Для упрощения конструкторских расчетов предполагается, что идеальный ОУ имеет следующие характеристики. 1. Коэффициент усиления при разомкнутой петле обратной связи равен бесконечности. 2. Входное сопротивление Rd равно бесконечности. 3. Выходное сопротивление R0 = 0. 4. Ширина полосы пропускания равна бесконечности. 5. V0= 0 при V1= V2 (отсутствует напряжение смещения нуля). Последняя характеристика очень важна. Так как V1-V2 = V0 / А, то если V0 имеет конечное значение, а коэффициент А бесконечно велик (типичное значение 100000) будем иметь V1- V2 = 0 и V1= V2. Поскольку входное сопротивление для дифференциального сигнала(V1 - V2) также очень велико, то можно пренебречь током через Rd .Эти два допущения существенно упрощают разработку схем на ОУ. Правило1. При работе ОУ в линейной области на двух его входах действуют одинаковые напряжения. Правило2. Входные токи для обоих входов ОУ равны нулю. Рассмотрим базовые схемные блоки на ОУ. В большинстве этих схем ОУ используется в конфигурации с замкнутой петлей обратной связи. 4.2.1 Усилитель с единичным коэффициентом усиления (повторитель напряжения) Если в неинвертирующем усилителе положить Ri равным бесконечности, а Rf равным нулю, то мы придем к схеме, изображенной на рис. 4.2. 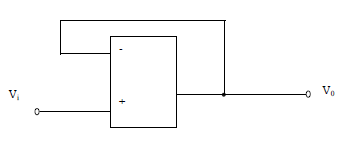 Рис.4.2. Повторитель напряжения Согласно правилу 1, на инвертирующем входе ОУ тоже действует входное напряжение Vi, которое непосредственно передается на выход схемы. Следовательно, V0 = Vi, и выходное напряжение отслеживает (повторяет) входное напряжение. У многих аналого-цифровых преобразователей входное сопротивление зависит от значения аналогичного входного сигнала. С помощью повторителя напряжения обеспечивается постоянство входного сопротивления. 4.2.2 Сумматоры Инвертирующий усилитель может суммировать несколько входных напряжений. Каждый вход сумматора соединяется с инвертирующим входом ОУ через взвешивающий резистор. Инвертирующий вход называется суммирующим узлом, поскольку здесь суммируются все входные токи и ток обратной связи. Базовая принципиальная схема суммирующего усилителя представлена на рис. 4.3. 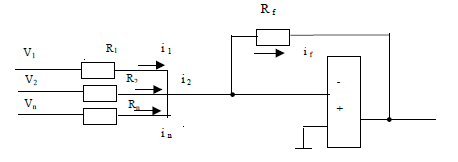 Рис. 4.3. Базовая принципиальная схема суммирующего усилителя Как и в обычном инвертирующем усилителе, напряжение на инвертирующем входе должно быть равно нулю, следовательно, равен нулю и ток, втекающий в ОУ. Таким образом, if = i1 + i2 + . . . + in 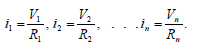 Так как на инвертирующем входе действует нулевое напряжение, то после соответствующих подстановок, получаем Резистор Rf определяет общее усиление схемы. Сопротивления R1, R2, . . . Rn задают значения весовых коэффициентов и входных сопротивлений соответствующих каналов. 4.2.3 Интеграторы Интегратор – это электронная схема, которая вырабатывает выходной сигнал, пропорциональный интегралу (по времени) от входного сигнала. 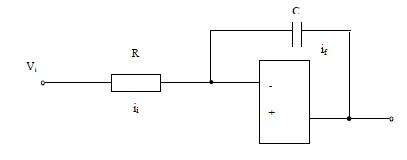 Рис. 4.4. Принципиальная схема аналогового интегратора На рис. 4.4 показана принципиальная схема простого аналогового интегратора. Один вывод интегратора присоединен к суммирующему узлу, а другой – к выходу интегратора. Следовательно, напряжение на конденсаторе одновременно является выходным напряжением. Выходной сигнал интегратора не удается описать простой алгебраической зависимостью, поскольку при фиксированном входном напряжении выходное напряжение изменяется со скоростью, определяемом параметрами Vi ,R и C. Таким образом, для того, чтобы найти выходное напряжение, нужно знать длительность действия входного сигнала. Напряжение на первоначально разряженном конденсаторе где if – через конденсатор и ti - время интегрирования. Для положительного Vi имеем ii = Vi/R. Поскольку if = ii , то с учетом инверсии сигнала получаем 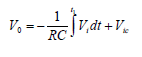 Из этого соотношения следует, что V0 определяется интегралом (с обратным знаком) от входного напряжения в интервале от 0 до t1 , умноженным на масштабный коэффициент 1/RC. Напряжение Vic - это напряжение на конденсаторе в начальный момент времени (t = 0). 4.2.4 Дифференциаторы Дифференциатор вырабатывает выходной сигнал, пропорциональный скорости изменения во времени входного сигнала. На рис. 4.5 показана принципиальная схема простого дифференциатора. 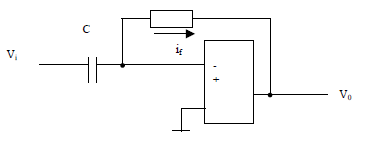 Рис. 4.5 Принципиальная схема дифференциатора Ток через конденсатор  . .Если производная  . положительна, ток ii течет в таком направлении, что формируется отрицательное выходное напряжение V0. . положительна, ток ii течет в таком направлении, что формируется отрицательное выходное напряжение V0.Таким образом  . .Этот метод дифференцирования сигнала кажется простым, но при его практической реализации возникают проблемы с обеспечением устойчивости схемы на высоких частотах. Не всякий ОУ пригоден для использования в дифференциаторе. Критерием выбора является быстродействие ОУ: нужно выбирать ОУ с высокой максимальной скоростью нарастания выходного напряжения и высоким значением произведения коэффициента усиления на ширину полосы. Хорошо работают в дифференциаторах быстродействующие ОУ на полевых транзисторах. 4.2.5 Компараторы Компаратор – это электронная схема, которая сравнивает два входных напряжения и вырабатывает выходной сигнал, зависящий от состояния входов. Базовая принципиальная схема компаратора показана на рис. 4.6. 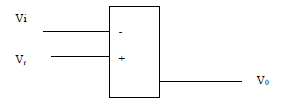 Рис. 4.6. Принципиальная схема компаратора Как видим, здесь ОУ работает с разомкнутой петлей обратной связи. На один из его входов подается опорное напряжение, на другой – неизвестное (сравниваемое) напряжение. Выходной сигнал компаратора указывает: выше или ниже уровня опорного напряжения находится уровень неизвестного входного сигнала. В схеме на рис.4.6 опорное напряжение Vr подается на неинвертирующий вход, а на инвертирующий вход поступает неизвестный сигнал Vi . При Vi > Vr на выходе компаратора устанавливается напряжение V0 = -Vr (отрицательное напряжение насыщения). В противоположном случае получаем V0 = +Vr .Можно поменять местами входы – это приведет к инверсии выходного сигнала. 4.3 Коммутация измерительных сигналов В информационно-измерительной технике при реализации аналоговых измерительных преобразований часто приходится осуществлять электрические соединения между двумя и более точками измерительной схемы с целью вызвать необходимый переходный процесс, рассеять запасенную реактивным элементом энергию (например, разрядить конденсатор), подключить источник питания измерительной цепи, включить ячейку аналоговой памяти, взять выборку непрерывного процесса при дискретизации и т. д. Кроме того, многие измерительные средства осуществляют измерительные преобразования последовательно над большим числом электрических величин, распределенных в пространстве. Для реализации сказанного используются измерительные коммутаторы и измерительные ключи. Измерительным коммутатором называется устройство, которое преобразует пространственно разнесенные аналоговые сигналы в сигналы, разделенные во времени, и наоборот. Измерительные коммутаторы аналоговых сигналов характеризуются следующими параметрами: - динамическим диапазоном коммутируемых величин; - погрешностью коэффициента передачи; - быстродействием (частотой переключении или временем, необходимым для выполнения одной коммутационной операции); - числом коммутируемых сигналов; - предельным числом переключений (для коммутаторов с контактными измерительными ключами). В зависимости от типа используемых в коммутаторе измерительных ключей различаются контактные и бесконтактные коммутаторы. Измерительный ключ представляет собой двухполюсник с явно выраженной нелинейностью вольт-амперной характеристики. Переход ключа из одного состояния (закрытого) в другое (открытое) выполняется с помощью управляющего элемента. 4.4 Аналого-цифровое преобразование Аналого-цифровое преобразование составляет неотъемлемую часть измерительной процедуры. В показывающих приборах эта операция соответствует считыванию числового результата экспериментатором. В цифровых и процессорных измерительных средствах аналого-цифровое преобразование выполняется автоматически, а результат либо поступает непосредственно на индикацию, либо вводится в процессор для выполнения последующих измерительных преобразований в числовой форме. Методы аналого-цифрового преобразования в измерениях разработаны глубоко и основательно и сводятся к представлению мгновенных значений входного воздействия в фиксированные моменты времени соответствующей кодовой комбинацией (числом). Физическую основу аналого-цифрового преобразования составляет стробирование и сравнение с фиксированными опорными уровнями. Наибольшее распространение получили АЦП поразрядного кодирования, последовательного счета, следящего уравновешивания и некоторые другие. К вопросам методологии аналого- цифрового преобразования, которые связаны с тенденциями развития АЦП и цифровых измерений на ближайшие годы относятся, в частности: - устранение неоднозначности считывания в наиболее быстродействующих АЦП сопоставления, получающих все большее распространение с развитием интегральной технологии; - достижение устойчивости к сбоям и улучшение метрологических характеристик АЦП на основе избыточной системы счисления Фибоначчи; - применение для аналого-цифрового преобразования метода статистических испытаний. В современном мире, мире компьютеризации, человек уже не может обходиться без компьютеров и специального программного обеспечения для достижения каких-либо целей. Все производство требует участие компьютерных технологий. Другими словами, компьютер – облегчает жизнь человека, а именно ускоряет требуемое время, экономит денежные средства и увеличивает качество и количество производимых товаров в производстве. Но по сей день появляются некоторые трудности, связанные со спецификой программного обеспечения. В предприятиях, которые занимаются разработкой различных РЭС, используют множество программных пакетов, позволяющие ускорить проектируемый процесс, устранить множество ошибок, возникшие при проектировании, и т.п. эти программные средства известны как САПР – система автоматического проектирования. В процессе обучения, для исследования различного рода схем, в отсутствии реальных, мы использовали их виртуальные аналоги, с помощью САПР Electronics Workbench. Спустя некоторое время, эта САПР развивалась и переросла уже в САПР NI MultiSim. И на данный момент, исследования схем проводятся с помощью этой программного средства. MultiSim разработана компанией National Instrument. Ею так же разработан ряд других программных средств, таких как Ultiboard, LabVIEW, Signal Express и т.д. Одной из особенностей этих программных средств является способность обмениваться между собой различными данными. Что позволяет сделать проектирование универсальным в своей области. Что такое MultiSim? Multisim – это уникальная возможность разработки схемы и ее тестирования/эмуляции из одной среды разработки. У такого подхода есть множество преимуществ. Новичкам в Multisim не нужно беспокоиться о сложном синтаксисе SPICE (Simulation Program with Integrated Circuit Emphasis – программа эмуляции со встроенным обработчиком схем) и его командах, а у продвинутых пользователей есть возможность настройки всех параметров SPICE. Благодаря Multisim описание схемы стало как никогда простым и интуитивно понятным. Представление в виде электронной таблицы позволяет одновременно изменять характеристики любого количества элементов: от схемы печатной платы до модели SPICE. Безрежимное редактирование – это наиболее эффективный способ размещения и соединения компонентов. Работать с аналоговыми и цифровыми составными элементами интуитивно просто и понятно. Кроме традиционного анализа SPICE, Multisim позволят пользователям подключать к схеме виртуальные приборы. Концепция виртуальных инструментов – это простой и быстрый способ увидеть результат с помощью имитации реальных событий. Также в Multisim есть специальные компоненты под названием «интерактивные элементы" (interactive parts), вы можете изменять их во время эмуляции. К интерактивным элементам относятся переключатели, потенциометры, малейшие изменения элемента сразу отражаются в имитации. При необходимости более сложного анализа Multisim предлагает более 15 различных функций анализа. Некоторые примеры включают использование переменного тока, Монте-Карло, анализ наиболее неблагоприятных условий и Фурье. В Multisim входит Grapher – мощное средство просмотра и анализа данных эмуляции. Функции описания и тестирования схемы, представленные в Multisim помогут любому разработчику схем, сэкономят его время и спасут от ошибок на всем пути разработки схемы. Что такое LabVIEW? До недавних нор специалисты при решении задач в собственной предметной области были вынуждены прибегать к помощи профессиональных программистов, как правило, не являющихся носителями знаний в этой области. Такое посредничество чаще всего увеличивало материальные и временные издержки, а самое главное, снижаю качество исследований и разработок. Даже использование специализированных программных средств лишь частично снимало эту проблему. Появление программных продуктов последнего поколения с весьма дружественными интерфейсами, адаптированных к менталитету и профессиональным навыкам специалистов, сделало возможным их использование специалистами напрямую, не прибегая к помощи посредников. К таким новым программным продуктам относится LabVIEW имеющий весьма удобный пользовательский интерфейс и мощные средства графического программирования. С каждой последующей версией LabVIEW возрастает уровень интеллектуализации интерфейса пользователя и удобство его использования. LabVIEW является идеальным программным средством для создания систем измерения, а также систем автоматизации управления на основе технологии виртуальных приборов. LabVIEW – программа в комплексе с такими аппаратными средствами, как встраиваемые в компьютер многоканальные измерительные аналого-цифровые платы, платы захвата и синхронизации видеоизображения для систем машинного зрения, платы управления движением и исполнительные механизмы, а также измерительные приборы, подключаемые к компьютеру через стандартные интерфейсы RS-232, RS-485, USB, GPIB (КОП), PXI, VXI, позволяет разрабатывать системы измерения, контроля, диагностики и управления практически любой сложности. LabVIEW имеет собственную мощную математическую поддержку. Кроме того, LabVIEW может интегрировать в себя программы, написанные в среде MatLab. Большое количество встроенных алгоритмов цифровой обработки одномерных и двумерных сигналов позволяет осуществлять весьма сложную обработку сигнала, изображения и экспериментальных данных во временной, пространственной и спектральной областях. Программная среда LabVIEW постоянно расширяется новыми средствами обработки сигналов на основе вейвлет-анализа, алгоритмов нечеткой логики, сетевых технологий и т.д. Роль программных сред, подобных LabVIEW, в научных исследованиях и технических экспериментах весьма велика. В настоящее время в науке наблюдается своего рода «ренессанс» эксперимента. Вызвано это развитием и совершенствованием измерительной техники и появлением нового поколения высокоточных и высокочувствительных измерительных приборов и автоматизированных измерительных систем, с помощью которых регистрируются тонкие эффекты 3-4-го порядка малости. Несмотря на свою «малость», эти эффекты часто играют ключевую роль в формировании основного явления, влияния на качество конечной продукции и т.д. Анализ подобных эффектов, как правило, оказывается вне досягаемости теоретических моделей. Поэтому в большинстве случаев эксперимент является единственным источником качественно новой и надежной информации. При этом результат достигается гораздо быстрее, чем методами «чистой» теории. Зачастую это выгодно и экономически, так как рядовой экспериментатор, вооруженный современным инструментарием, подобным LabVIEW, может достаточно скоро получить нужную информацию. Традиционно для исследователя функции моделирования и экспериментирования разделены. Моделирование осуществляется в среде математических программных пакетов, а эксперименты поддерживаются другими программными средствами, что отнюдь не повышает эффективность исследований. Эффективность использования среды LabVIEW в научных исследованиях состоит в том, что, оставаясь в ее рамках, можно разрабатывать как математическую модель объекта, так и снабжать эту модель экспериментальными данными с помощью аппаратных средств ввода-вывода, сопряженных с реальным объектом. Перспектива использования LabVIEW для продления испытаний и проверки Инженер проектировщик, имея теоретические знания в различных областях, может производить различные анализы, получать, вычислять, преобразовать и сравнивать необходимые данные. Т.е. LabVIEW гибкий в своем использовании, за счет обширного набора функций. Проведение испытаний и проверки проводится большей точностью и скоростью, по сравнению с MultiSim. Позволяет пользователю делать лицевую панель удобную для регулировки и визуализации. Существует онлайн режим, благодаря чему пользователю предоставляется возможность проводить испытания с использованием специального высокопроизводительного оборудования посредством интернет обмена. Имея эти и другие достоинства, LabVIEW идеально подходит для проведения испытаний и проверки РЭС. До октября 2008 года пользователь мог осуществлять связь между MultiSim и LabVIEW только посредством экспорта данных через «Grapher», и интегрировать созданные виртуальные приборы (ВП) LabVIEW в MultiSim вручную. Это и многое другое затрудняло работу пользователя. 7 октября 2008 года вышла статья An Introduction to Multisim Automation with the LabVIEW Multisim Connectivity Toolkit (beta) [1], в которой рассказывается о осуществления связи LabVIEW и MultiSim посредством дополнительных инструментов. Благодаря этому дополнению устранены выше упомянутые недостатки. СВЯЗЬ «MULTISIM + LABVIEW» Используя дополнение An Introduction to Multisim Automation with the LabVIEW Multisim Connectivity Toolkit (beta) инженеру достаточно собрать схему РЭС в MultiSim, согласно определенному правилу (см. ниже) и произвести моделирование в LabVIEW в зависимости от того, что хочет получить сам инженер. Каким образом происходит эта связь? MultiSim Automation API позволяет производить и получать данные моделирования MultiSim через COM-интерфейс. Т.е. API позволяет программно управлять моделированием MultiSim без необходимости просмотра в MultiSim. Таким образом, клиенты, написанные на любом COM-Aware языке программирования, таких как NI LabVIEW, могут получать доступ к MultiSim через этот интерфейс, а так же управлять и получать данные моделирования движка. Через API можно: Открывать и закрывать существующие схемы MultiSim/ Изменить сигнал в месте установленного источника тока или напряжения. Управлять запуском, остановкой, паузой и т.п. моделирования. Получать результаты моделирования от установленного «пробника». Получить перечисления компонентов схемы. Заменить компоненты компонентами из базы данных. Получить и установить значения резисторов, конденсаторов и катушек индуктивности. Перечислять варианты. Получить и установить активный вариант для моделирования. Создать отчет по схеме, включая перечень элементов и список соединений. Получить изображение схемы. Изменять и заменить компоненты схемы на верхнем уровне проектирования, компоненты подсхем и иерархические блоки не могут быть изменены. Подготовка схемы в MultiSim Настройка входов Используя API можно менять значение источника сигнала (питания). Для этого необходимо в схеме установить этот источник. В зависимости от надобности, источников может несколько, и нужно установить их там где понадобится их контролирование. Установка источника: Выберите Place → Component Database установите Master Database Group установите Sources В Family выберите POWER_SOURCES Здесь выбираем AC_POWER или DC_POWER Настройка выходов Для того чтобы API понял с какой ветви схемы нужно брать сигнал необходимо установить «Пробник» (Probe). Каждый «Пробник» в схеме должен иметь свое индивидуальное имя. Установка «Пробника»: Выберите Simulate → Instruments → Measurement Probe Подключите «Пробник» к интересующей ветви Дважды щелкните по «Пробнику» Выберите вкладку «Monitor» В разделе RedDes введите имя «Пробника». Для ветви, которое является выходом, используют имя «output». Multisim Automation with the LabVIEW Multisim Connectivity Toolkit (beta) Как было сказано выше, Multisim Automation with the LabVIEW Multisim Connectivity Toolkit (beta) позволяет связывать схему в MultiSim с LabVIEW через Multisim Automation API. Инструменты Multisim Automation API, такие как открытие, закрытие, просмотр схемы, запуск, пауза и т.п., представлены в LabVIEW как ВП. Данное дополнение можно найти по адресу ni.com/labs. После установки Multisim Automation with the LabVIEW Multisim Connectivity Toolkit (beta) новую палитру ВП можно найти в Functions → Connectivity → Multisim, а так же в Functions → Addons → Multisim (см. рис.1). 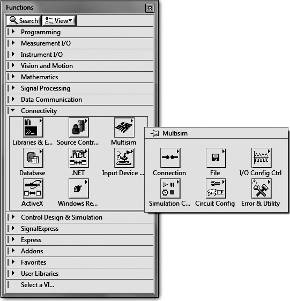 Рис.1. Палитра MultiSim Automation API Подключаемые функции
Полиморфные функции Для облегчения многие из функций LabVIEW являются полиморфными, т.е. один блок имеет несколько функций. Например, если рассмотрим функцию Log File (Файл Журнала), то можем увидеть что он может иметь одно из трех подфункций: Get the Log File Path (Получить путь к Файлу Журналу); Set the Log File Path (Установить путь к Файлу Журналу); Disable the Log File Path (Отключить путь к Файлу Журналу). Имеющиеся полиморфные функции и связанные с ними подфункции:
Модель лабораторного макета «входная цепь бытовых радиоприемников» – «схема с внутриемкостной связью с антенной и внутриемкостной связью с нагрузкой» Используя вышеупомянутые инструкции соберем схему с внутриемкостной связью с антенной и внутриемкостной связью с нагрузкой входной цепи бытовых радиоприемников (см. рис.2). На вход реального лабораторного макета подается синусоидальный сигнал с ВЧ генератора амплитудой 50 мВ и частотой, изменяемой в пределах 600…1400 кГц. Поэтому в схеме собранной в Multisim установим источник переменного напряжения – DC_POWER. Конечно, далее, уже в LabVIEW значение источника будем менять по частоте в заданном диапазоне, но для правильной синхронизации программных средств, нам нужно установить любое значение. Поэтому выбрано значение чатоты 1 МГц. R3 является нагрузкой схемы, поэтому выбор ветви пал на ветвь «output». Куда и устанавливаем «пробник». Изменим имя пробника с «Probe1» на «output». На этом подготовка в среде Multisim закончена. 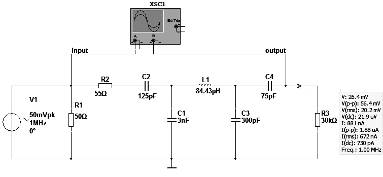 Рис.2. Схема в Multisim Переходим к сборке модели исследования в LabVIEW. Связь будет осуществляться таким образом:  Рис.3. Обмен данными между MultiSim и LabVIEW модели Сборку модели начнем с установкой необходимых ВП в окне Block Diagram LabVIEW. Расположим блоки по их надобности (см. рис.4). Включаем «движок» Multisim; Открываем файл cхемы в MultiSim; Определяем входной источник входного сигнала; Включаем блок, с помощью которого можно подавать сигнал из LabVIEW в исследуемую схему в MultiSim, через источник V1; 4'. Генератор, с помощью которого подается сигнал на блок синхронизации с MultiSim; Устанавливаем значение ферровариометра L1; Определяем местоположение «Пробника»; Определяем какие данные нужно получить из «Пробника»; Запускаем моделирование в MultiSim (кстати, в этот момент начинает работать MultiSim в фоновом режиме); Получаем данные после моделирования; Смотрим, изменилось ли значение ферровариометра L1; Выводим необходимые данные для контроля сигнала, в нашем случае на осциллограф и на вольтметр; Останавливаем моделирование; Отключаем «движок» MultiSim; Осциллограф. Далее переходим в окно Front Panel в LabVIEW. Здесь установим и разместим необходимые инструменты контроля (см. рис.5) Полученная виртуальная модель лабораторного макета полностью соответствует реальному лабораторному макету. 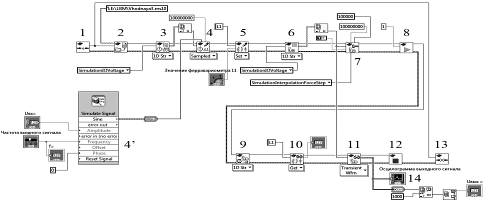 Рис.4. Блок диаграммы лабораторного макета 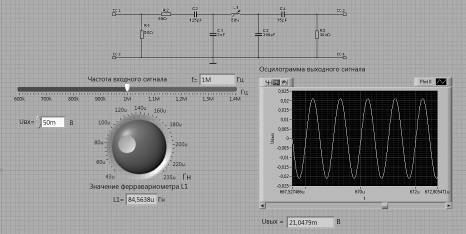 Рис.5. Лицевая панель лабораторного макета Заключение Проделанная работа позволяет с уверенностью сказать Проектирование занимает меньшее время, сил и денежных средств. С помощью данного дополнения инженер с легкостью может продемонстрировать функциональность разрабатываемого устройства. Студенты могут выполнять лабораторные работы используя виртуальные лабораторные макеты, например как представленный в данном докладе. И т.к. этот любой виртуальный макет можно размножить, то за одно занятие все студенты могут выполнять одну и ту же лабораторную работу, используя каждый свой макет. А это позволяет лучше понять лекционный курс, т.к. студент уже имеет все необходимые знания. А так же студент может выполнить лабораторную работу дома, используя при этом свой ПК. Если рассматривать второй и третий пункты достоинств, то при исследовании устройства, можно выявить еще одно достоинство: выход из строя виртуального устройства–макета невозможен. В [2] предложены модели исследования по дисциплине «Электродинамика и распространение радиоволн». Смею предположить, что благодаря дополнению можно исследования передатчика, передачи и прием сигнала объединить в единое целое. И еще можно выявить ряд не перечисленных выше достоинств… |