ЛСАР лаб3. Отчет по лабораторной работе 3 Вариант 8 По дисциплине
 Скачать 2.14 Mb. Скачать 2.14 Mb.
|

|
Некоммерческое акционерное общество «Алматинский университет энергетики и связи имени Гумарбека Даукеева» Кафедра «Автоматизация и управление» ОТЧЕТ по лабораторной работе №3 Вариант №8 По дисциплине: Линейные системы автоматического регулирования На тему: Виды звеньев ОП: 6В07108 – Автоматизация и управление Выполнила: Турегалиев Е. .Группа: АИСУ 19-10 (Ф.И.О.) Приняла: старший препод. Калабаева А..___________________________ (ученая степень, звание, Ф.И.О.) __________ ________________ «_____»________________2021 г. (оценка) (подпись) Алматы, 2022 Цель работы: исследование динамических и статических характеристик систем, описываемых линейными дифференциальными уравнениями с помощью моделирующего программного пакета. 1 Рабочие задания: 1) По варианту (см. таблицу 1.1), указанному преподавателем, собрать схему рисунка 1.1 2) Вывести на осциллограмму показания точек №1, №2, №3, №4 и зафиксировать при различных комбинациях (записать) 3) Исследовать динамику переходных процессов при изменении одного из параметров: А1, А2, А3 4) Собрать схему для моделирования системы линейныхдифференци-альных уравнений. При этом для аijвыбрать два произвольных значения в пределах от 0 до 10 5) Вывести на осциллограмму координаты f,x1,x2,x3 6) В качестве воздействия использовать ступенчатую функцию с коэффициентом усиления k = 5 (f1) и синусоиду с частотой 5 Гц и амплитудой А=5(f2) 7) Зафиксировать переходные процессы при различных значениях аij и воздействиях f1 и f2. Если переходный процесс будет расходящимся, необходимо изменять знак перед сумматором (рисунок 1). Р 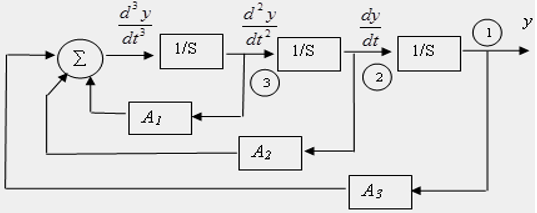 исунок 1 - Схема На рисунке 2 представлена схема линейной системы 3-го порядка. 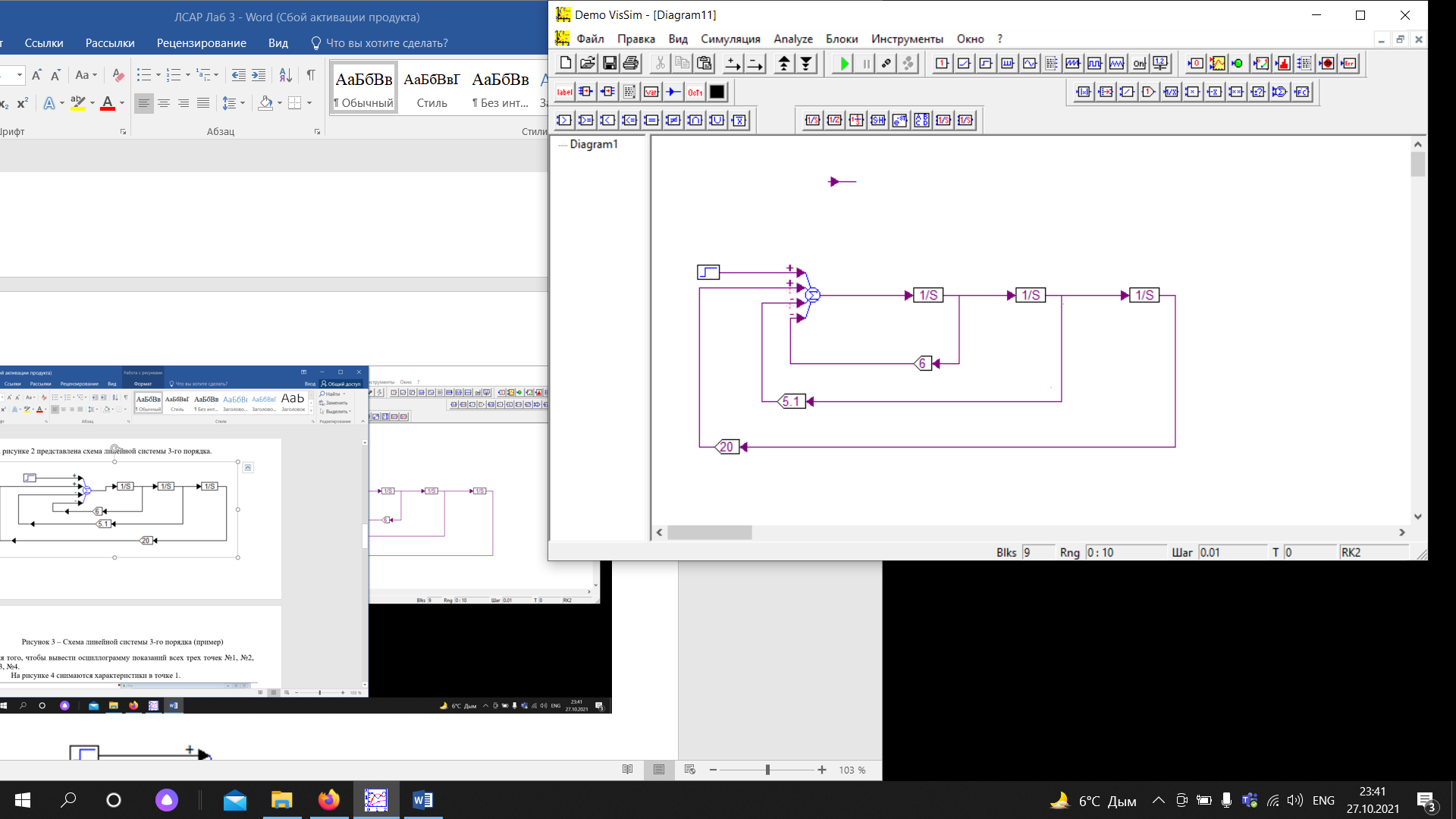 Рисунок 2 – Схема линейной системы 3-го порядка (пример) Для того, чтобы вывести осциллограмму показаний всех трех точек 1, 2, 3, 4. 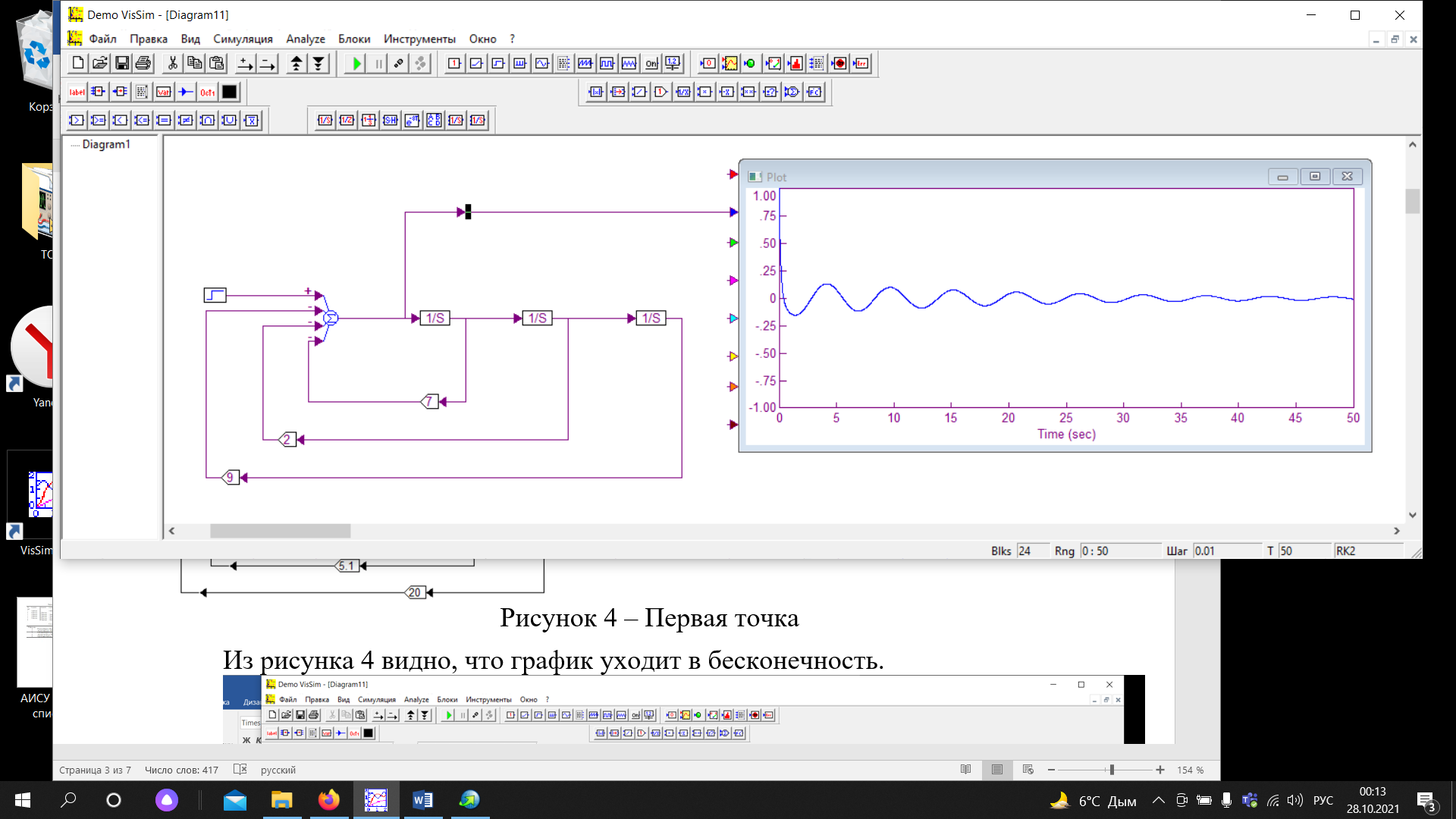 Рисунок 3 – Первая точка 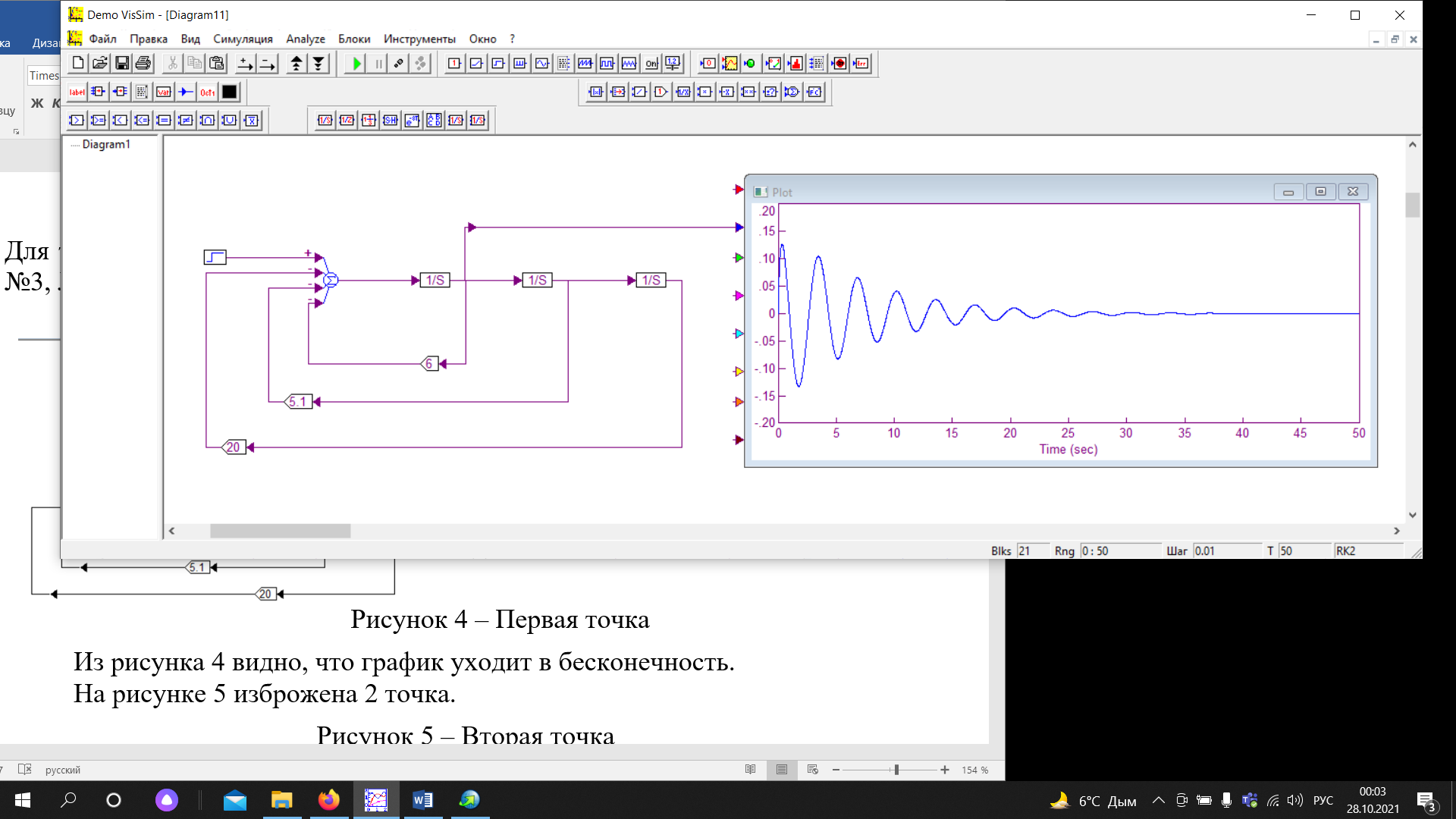 Рисунок 4 – Вторая точка 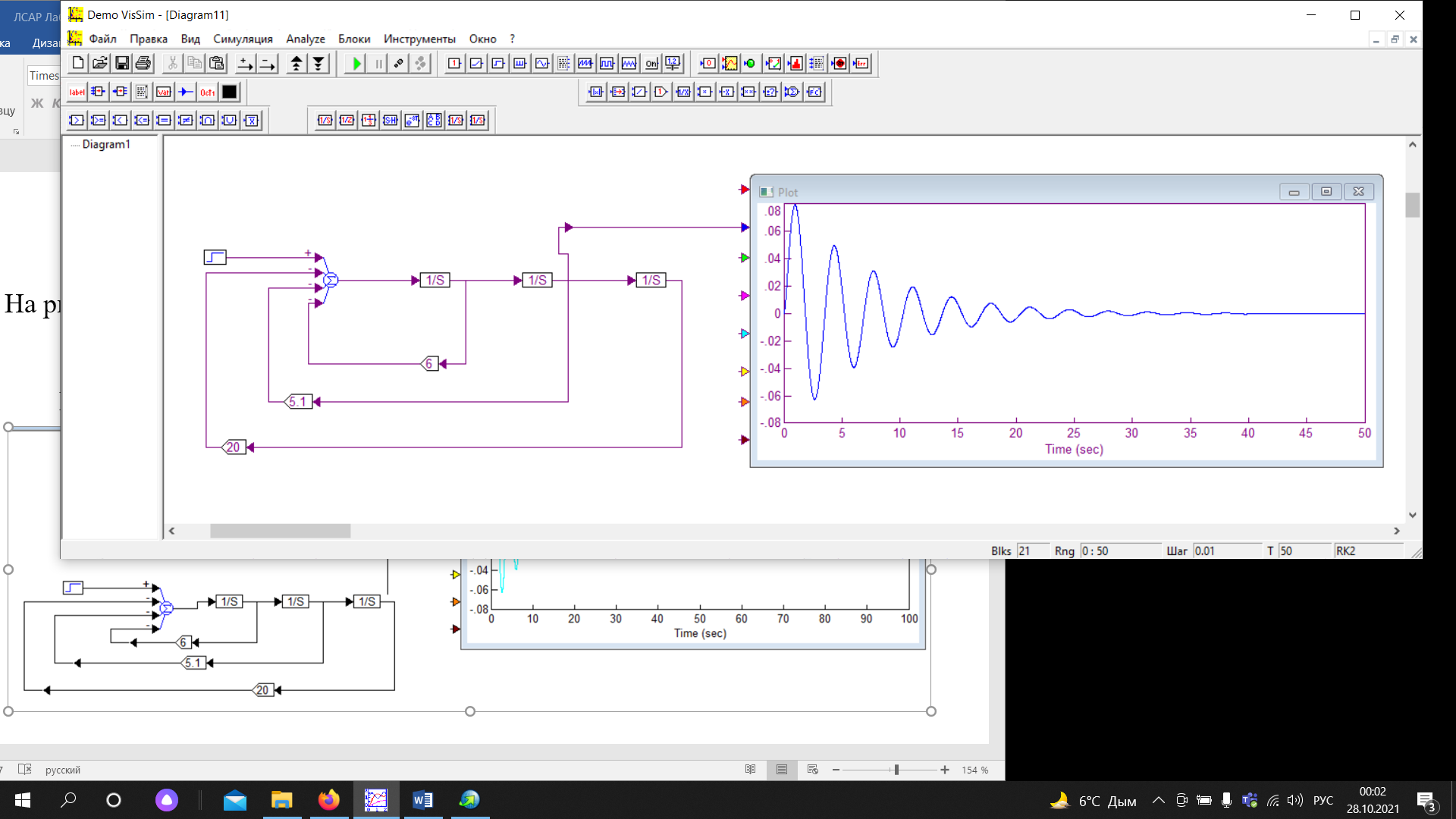 Рисунок 5 – Третья точка 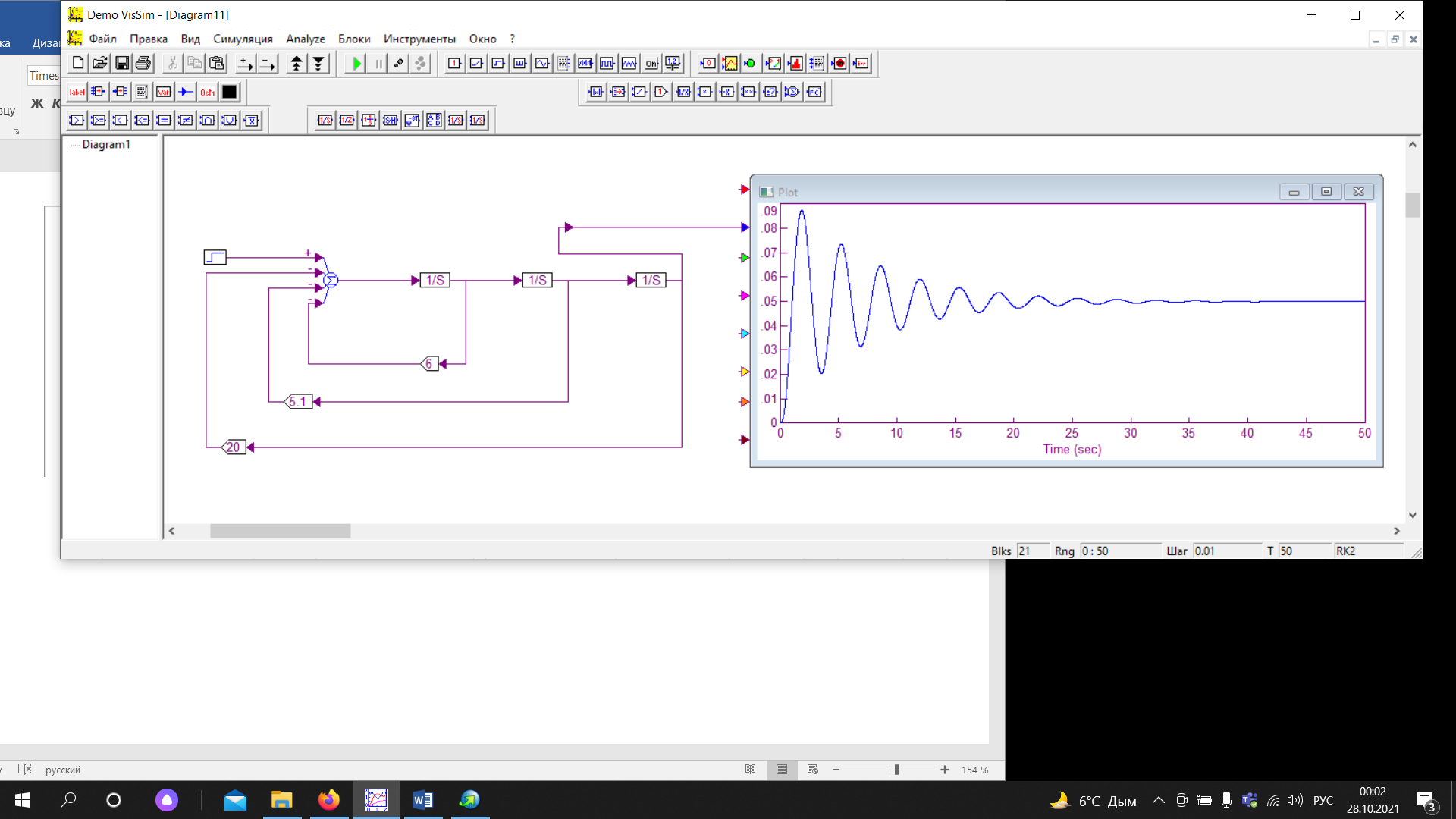 Рисунок 6 – Четвертая точка Исследуем динамику переходных процессов при изменении одного из параметров. Например, изменим параметр A2 на 8. 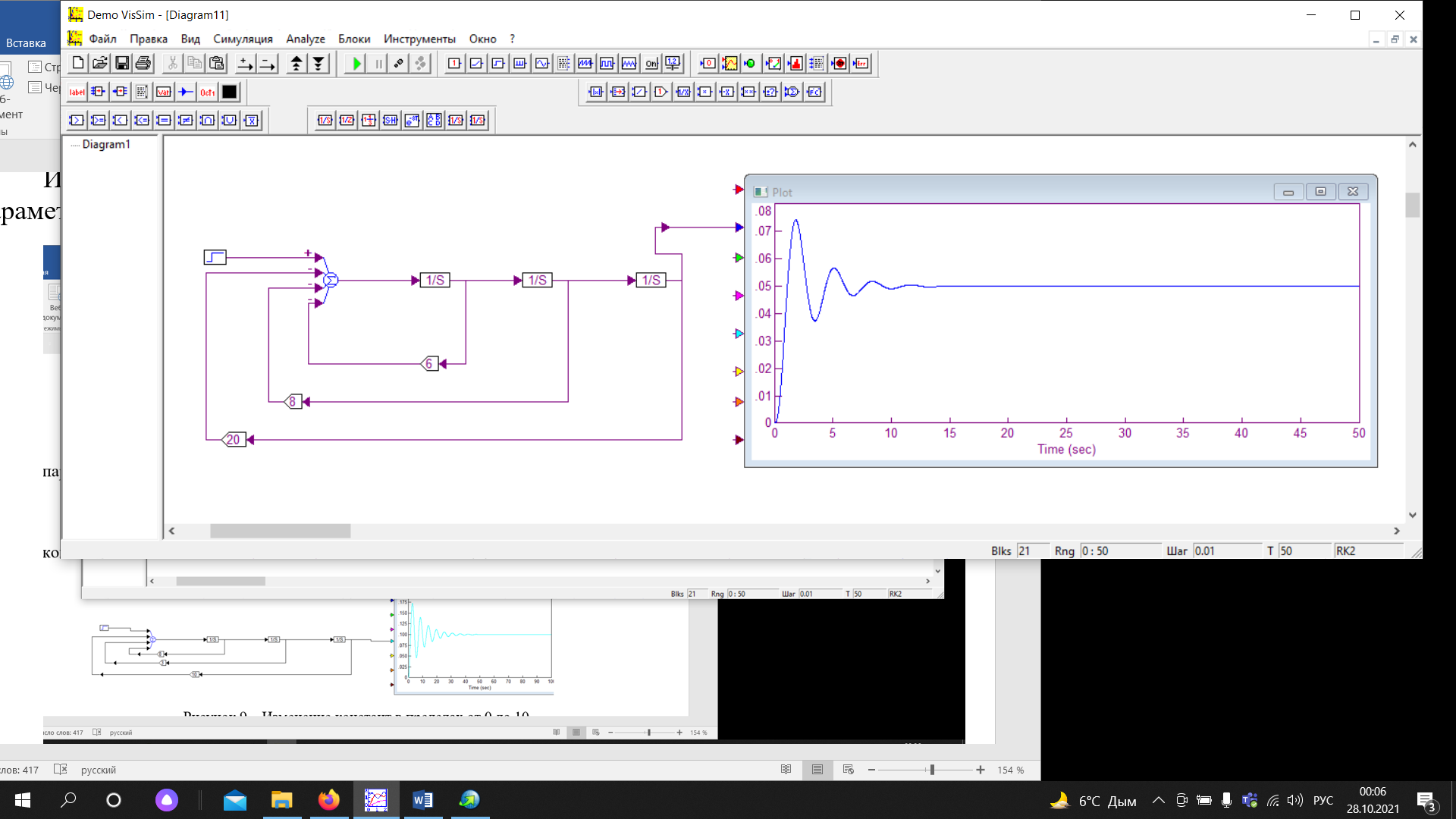 Рисунок 7 – Изменение одного из параметров Собираем новую схему с использованием трех сумматоров и новых трех констант. 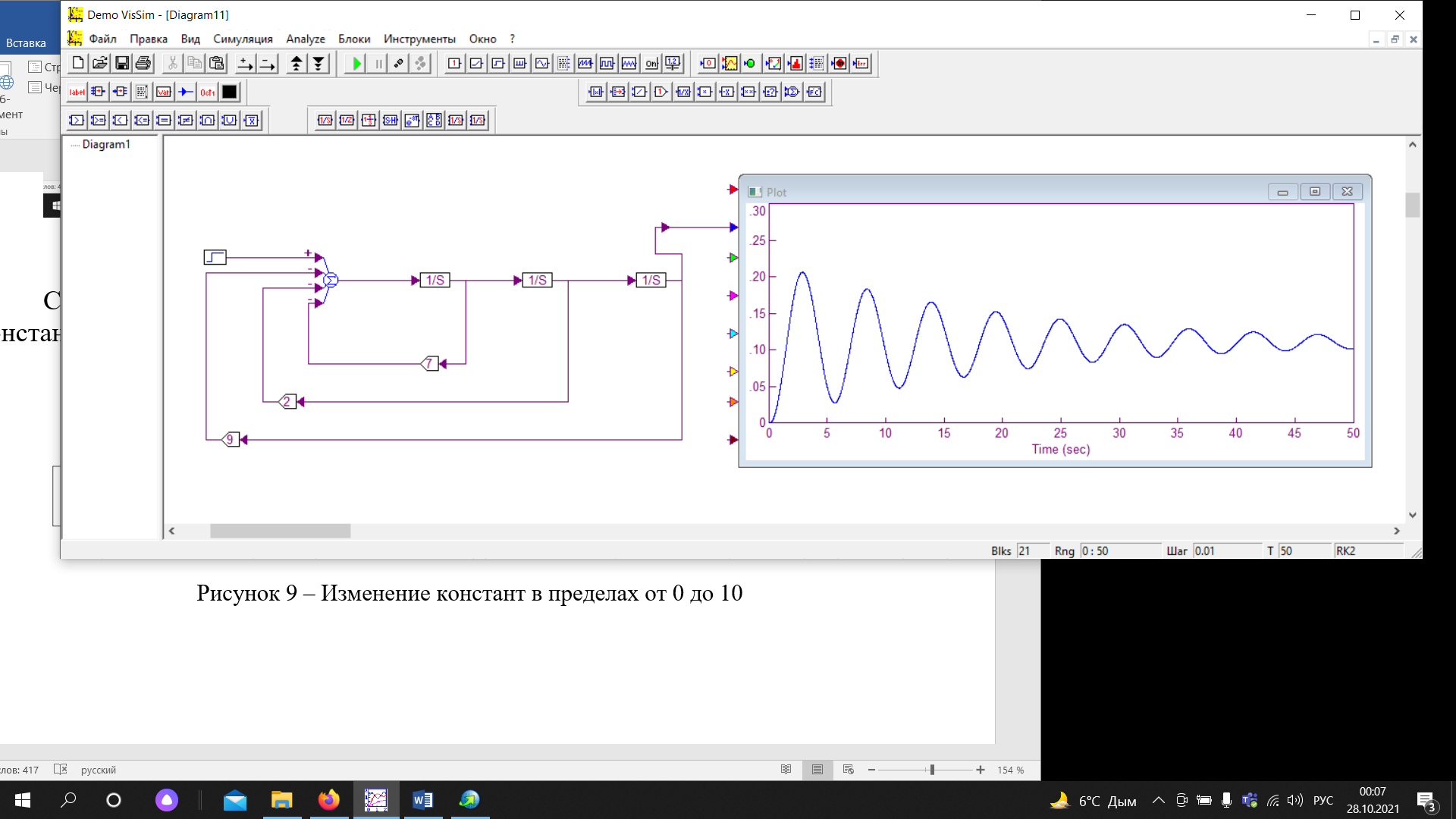 Рисунок 8 – Изменение констант в пределах от 0 до 10 На рисунке 9 мы получили осциллограмму координат f, x1, x2, x3. 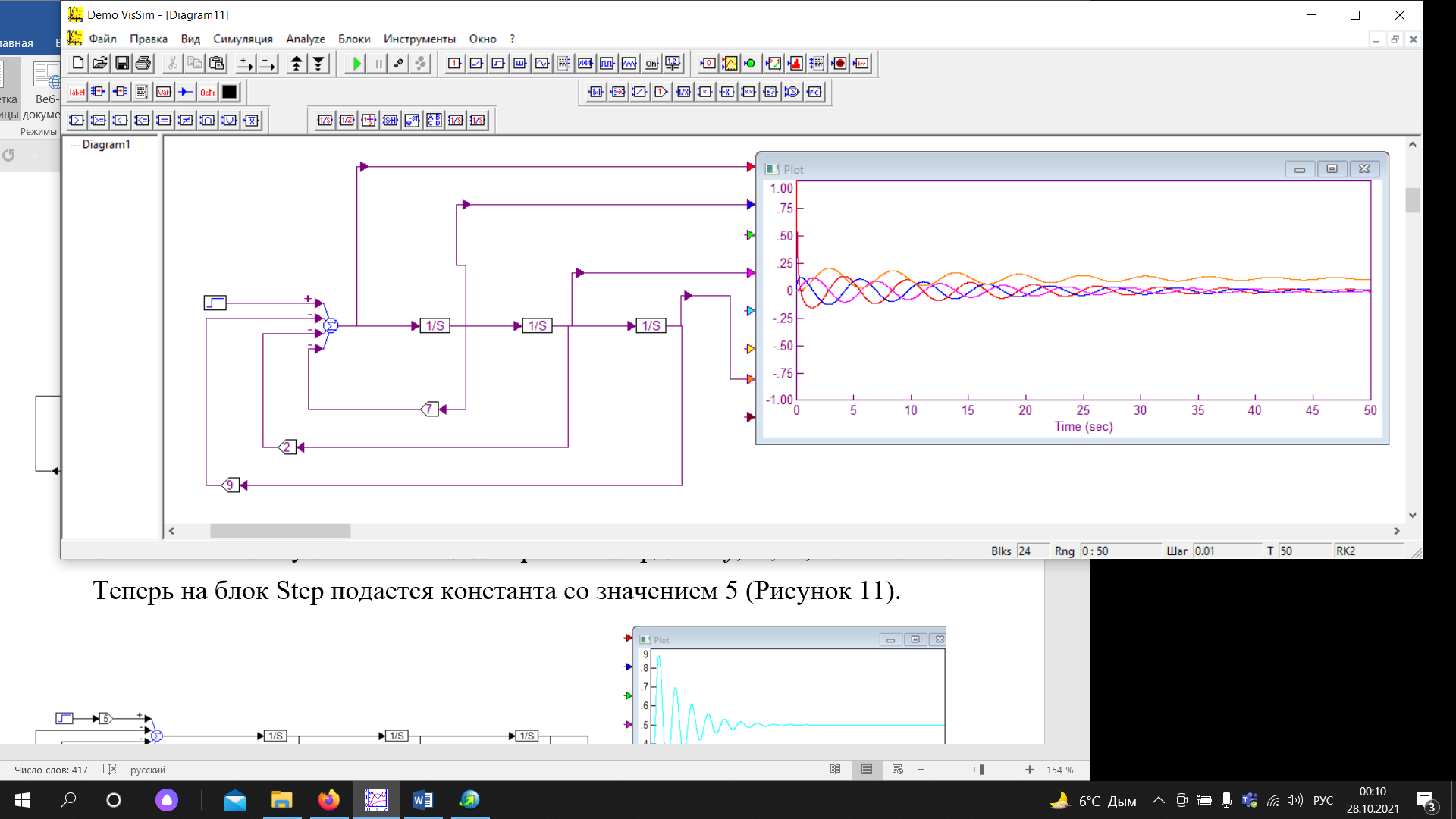 Рисунок 9 – Осциллограмма координат f,x1, x2, x3 Теперь на блок Step подается константа со значением 7. 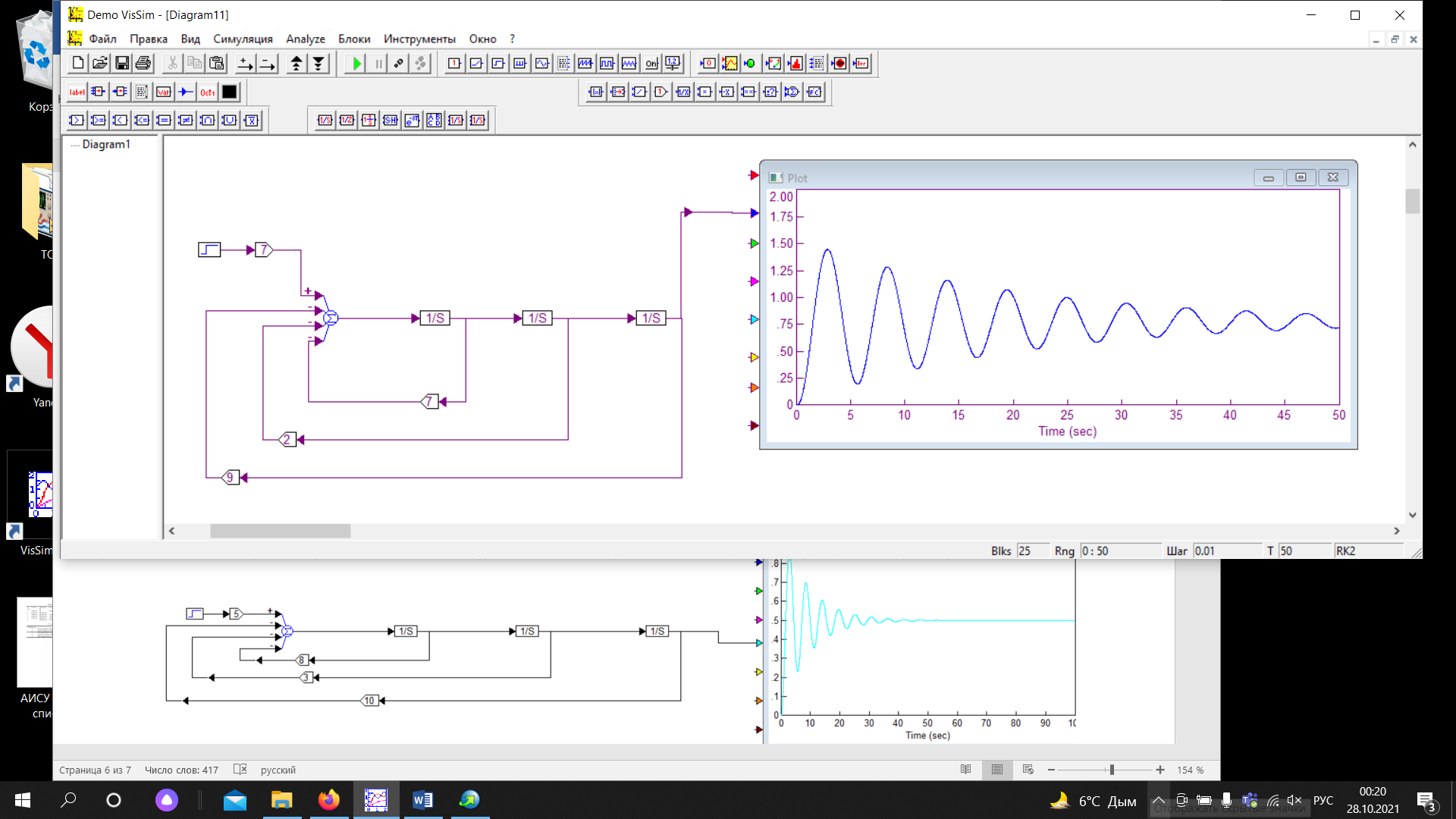 Рисунок 10 – Ступенчатая функция со значением 7 Рисунок 10 – Ступенчатая функция со значением 7На рисунке 12 показана синусоида с частотой 3 и амплитудой 3. 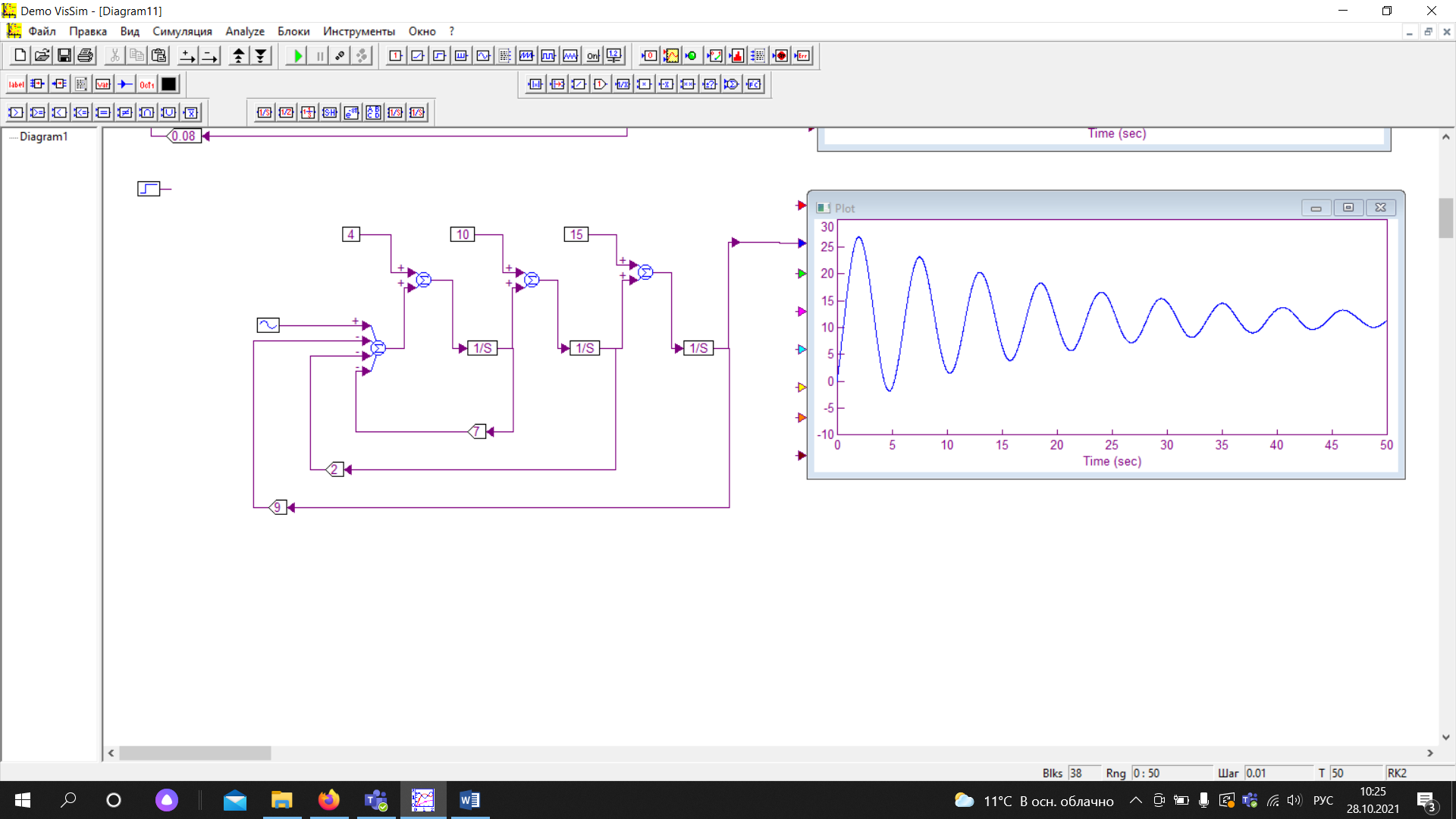 Рисунок 11 – Синусоида Вывод В ходе данной работы изучены различные характеристики передаточных динамических звеньев. Основная часть работы выполнена с использованием сумматора и входящим в него блоков умножающих входную величину на постоянный коэффициент, которые менялись относительно задания. Для создания синусоиды, использовался блок генерирующий синусоиду. |