Лабораторная работа СУХТП. уровень жидкости. Отчет по лабораторной работе 4 Изучение показателей качества работы системы
 Скачать 468.47 Kb. Скачать 468.47 Kb.
|

|
Министерство науки и высшего образования Российской Федерации Федеральное государственное автономное образовательное учреждение высшего образования «Пермский национальный исследовательский политехнический университет» Кафедра Оборудование и автоматизация химических производств Отчет по лабораторной работе №4 Изучение показателей качества работы системы двухпозиционного регулирования уровня в емкостях
Пермь 2022 ` Цели работы: 1. Ознакомиться с устройством и принципом действия гидростатического уровнемера и методикой определения уровня этим уровнемером. 2. Изучить принцип действия лабораторной установки. 3. Исследовать параметры автоколебаний в системе с двухпозиционным регулированием уровня в емкостях. Описание лабораторной установки. Функциональная схема лабораторного стенда автоматизированной системы управления уровнем представлена на рис. 1. 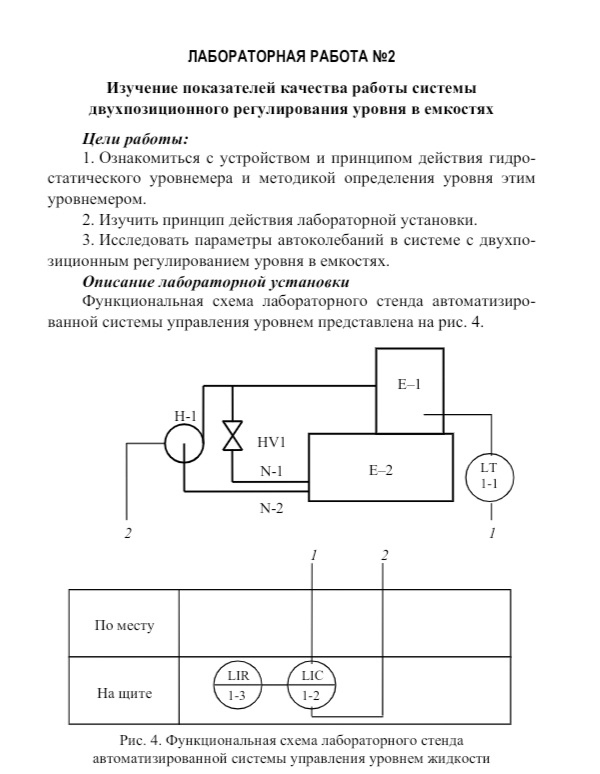 Рис. 1. Функциональная схема лабораторного стенда автоматизированной системы управления уровнем жидкости Лабораторный стенд представляет собой систему из двух резервуаров Е-1 и Е-2. В резервуаре Е-2 находится жидкость, которая перекачивается насосом Н-1 по линии №-2 в резервуар Е-1. Из резервуара Е-1 жидкость самотеком может стекать в резервуар Е-2 по линии №-1, в которой установлен шаровой кран НУ1. Резервуар Е-1 является объектом управления. В роли регулируемой величины у выступает уровень в резервуаре Е-1. На лицевой панели стенда (на щите) расположен измеритель-регулятор ИРТ5920 (поз. 1-2), выполняющий функцию регулирования и индикации текущего значения уровня. В автоматическом режиме работы на основном дисплее регулятора ИРТ5920 отображается текущее значение регулируемого параметра у (текущее значение уровня в Е-1), на дополнительном — величина задания и. Также значение регулируемой величины регистрируется и отображается на первом канале регистратора РМТФУТ, (поз. 1-3). Регулирование уровня реализуется посредством включения и выключения насоса Н-1, являющегося в данной системе исполнительным устройством. Обратная связь в системе реализована при помощи гидростатического уровнемера-преобразователя РЕВег Возетоши 3051 (рис. 5,4), который установлен по месту и выполняет функцию измерения текущего значения уровня и передачу данного сигнала в регулятор ИРТ5920. В датчиках используется сенсорный модуль на базе емкостной ячейки (см. рис. 5, б, в). Мембраны 4, воспринимающие лавление измеряемой среды, расположены в одной горизонтальной плоскости, поэтому ячейка получила название копланарной. Давление из положительной и отрицательной камер датчика передается через разделительные мембраны 4 и заполняющую жидкость 5 на измерительную мембрану 3, расположенную между пластинами конденсатора 2. Рабочие камеры датчика, образованные пластинами конденсатора, размещены в специальной капсульной защите. Под воздействием измеряемого давления измерительная мембрана 3 прогибается, в результате чего изменяется электрическая емкость ячеек, вследствие чего генерируется электрический сигнал, который затем преобразуется в цифровой и передается на микроконтроллер 6. Выходной блок электронной платы микроконтроллера преобразует сигналы измерительной информации в стандартный аналоговый то- ковый выходной сигнал 4—20 мА.  Рис. 2. Датчик уровня Fisher Rosemount 3051: а - внешний вид датчика; б,в - конструкчия емкостной ячейки В данном лабораторном стенде положительная камера датчика подсоединена к резервуару Е-1 через гидрозатвор, представляющий собой изогнутую трубку, колено которой находится ниже, чем резервуар Е-1, как показано на рис. 6. Таким образом, в колене гидрозатвора постоянно находится жидкость, исключающая проникновение воздуха в камеру лагчика. Нахождение воздуха в камере датчика может вызвать погрешность измерения, так как газ — более сжимаемая среда, чем жидкость. При монтаже латчика воздух стравливают при помощи специальных игольчатых (дренажных) клапанов 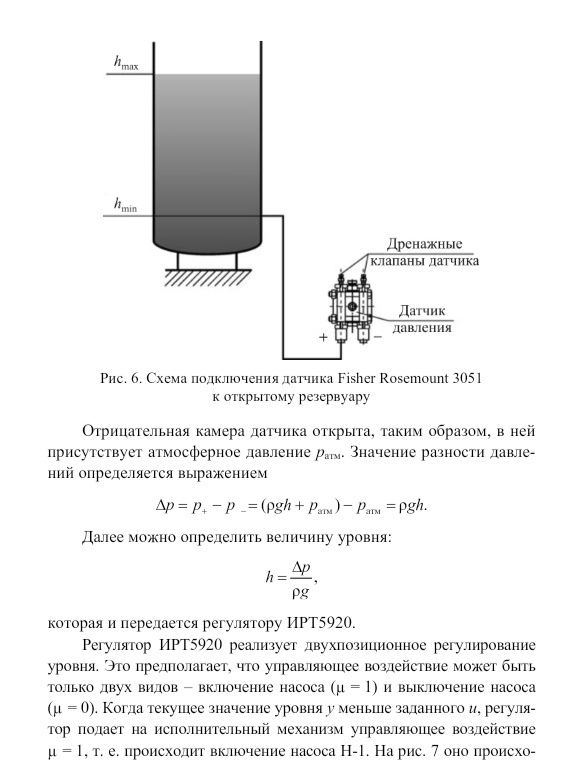 Рис. 3. Схема подключения датчика Fisher Rosemount 3051 к открытому резервуару Отрицательная камера датчика открыта, таким образом, в ней присутствует атмосферное давление. Регулятор ИРТ5920 реализует двухпозиционное регулирование уровня. Это предполагает, что управляющее воздействие может быть только двух видов — включение насоса (и = 1) и выключение насоса (0). Когда текущее значение уровня у меньше заданного и, регулятор подает на исполнительный механизм управляющее воздействие, т.е. происходит включение насоса Н-1. На рис. 4 оно происходит в точке а (момент подачи задания). Когда текущее значение уровня достигает заланного (у = и), регулятор выключает насос. Однако по инерционности (связанной с немоментальным остановом лопаток насоса) и с учетом запаздывания (сказывается относительно. Большая длина трубопроводов) уровень в резервуаре Е-1 продолжает некоторое время увеличиваться (налив превышает слив), затем достиет максимального значения (налив равен сливу) и начинает убывать (жидкость стекает самотеком в резервуар Е-2 по линии №-1). 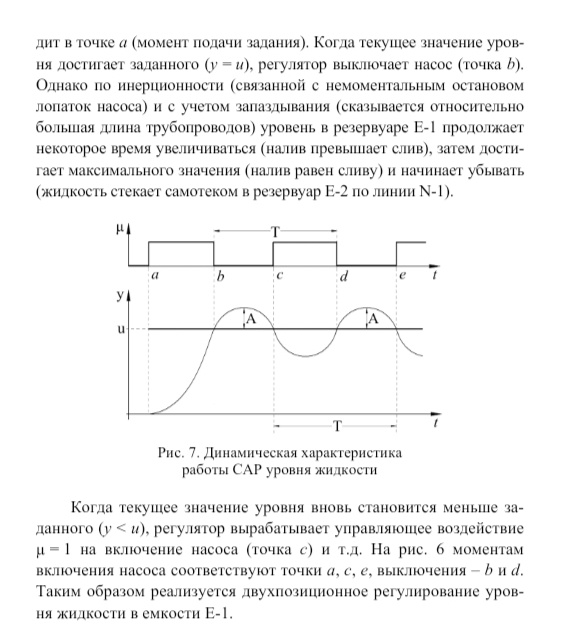 Рис. 4. Динамическая характеристика работы САР уровня жидкости Когда текущее значение уровня вновь становится меньше заданного (у < и), регулятор вырабатывает управляющее воздействие и-1 на включение насоса (точка с) и тд. На рис. 3 моментам включения насоса соответствуют точки а.. Таким образом реализуется двухпозиционное регулирование уров- ня жидкости в емкости Е-1. Расчетно-графическая часть Вычисляем абсолютную погрешность, используя полученные данные, по формуле 1.
где  – показания гидростатического уровнемера, %; – показания гидростатического уровнемера, %; – показания по уромнемерному стеклу, %. – показания по уромнемерному стеклу, %.Пример расчёта:  % %Вычисляем относительную погрешность по формуле 2:
Пример расчёта:  Вычислим относительную приведённую погрешность по формуле 3:
где  – нормированное значение шкалы прибора. – нормированное значение шкалы прибора.Пример расчёта:  По полученным в ходе расчёта данным строим графики зависимостей ∆ = ƒ ( ) , δ = ƒ ( ) , γ = ƒ ( ). Рисунок 5 – Зависимость абсолютной погрешности измерений от действительных показаний по уровнемерному стеклу  Рисунок 6 – Зависимость относительной погрешности измерений от действительных показаний по уровнемерному стеклу  Рисунок 7 – Зависимость относительной приведенной погрешности измерений от действительных показаний по уровнемерному стеклу Выводы: В ходе работы мы изучили конструкцию и принцип действиягидростатического уровнемера; Изучили конструкцию и принцип действия датчика уровня Fisher Rosemount 3051 ; Выполнили работу на лабораторной установке и рассчитали необходимые величины погрешностей. | ||||||||||||||||||||||||||||||||||||
 ,
, ,
,