решение. Отчет задание Создание таймера в пакете CoDeSy
 Скачать 248.45 Kb. Скачать 248.45 Kb.
|

|
ОТЧЕТ задание 1. Создание таймера в пакете CoDeSy Решение: В пакете CoDeSys c использованием выбранного стандартного языка программирования ПЛК или их комбинации создать программу, реализующую таймер с цифровой или аналоговой индикацией и многофункциональной кнопкой. Функции кнопки реализуются в следующей циклически замкнутой последовательности: 1. Запуск таймера; 2. Остановка таймера; 3 Обнуление показания индикатора. TON — функциональный блок «таймер с задержкой включения»TON(IN, PT, Q, ET) Входы IN и PT типов BOOL и TIME соответственно. Выходы Q и ET аналогично типов BOOL и TIME. Пока IN равен FALSE, выход Q = FALSE, выход ET = 0. Как только IN становится TRUE, начинается отсчет времени (в миллисекундах) на выходе ET до значения, равного PT. Далее счетчик не увеличивается. Q равен TRUE, когда IN равен TRUE, а ET равен PT, иначе FALSE. Таким образом, выход Q устанавливается с задержкой PT от фронта входа IN. Варианты объявлений: TON TON1(); TON TON1(unsigned long PT); // с заданием интервала времени PT Варианты использования: Q = TON1.Run(boolean IN); // вызов "все в одном" TON1.IN = IN; TON1.Run(); Q = TON1.Q; Временная диаграмма работы TON: TOF — функциональный блок «таймер с задержкой выключения»TOF(IN, PT, Q, ET) Входы IN и PT типов BOOL и TIME соответственно. Выходы Q и ET аналогично типов BOOL и TIME. Если IN равен TRUE, то выход Q = TRUE и выход ET = 0. Как только IN переходит в FALSE, начинается отсчет времени (в миллисекундах) на выходе ET. При достижении заданной длительности отсчет останавливается. Выход Q равен FALSE, если IN равен FALSE и ET равен PT, иначе — TRUE. Таким образом, выход Q сбрасывается с задержкой PT от спада входа IN. Очень похоже на TON, для краткости: TOF TOF1(unsigned long PT); // с заданием интервала времени PT Q = TOF1.Run(boolean IN); // вызов "все в одном" Временная диаграмма работы TOF: TP — функциональный блок «импульс-таймер»TP(IN, PT, Q, ET) Входы IN и PT типов BOOL и TIME соответственно. Выходы Q и ET аналогично типов BOOL и TIME. Пока IN равен FALSE, выход Q = FALSE, выход ET = 0. При переходе IN в TRUE выход Q устанавливается в TRUE и таймер начинает отсчет времени (в миллисекундах) на выходе ET до достижения длительности, заданной PT. Далее счетчик не увеличивается. Таким образом, выход Q генерирует импульс длительностью PT по фронту входа IN. В Arduino IDE:Очень похоже на TON, для краткости: TP TP1(unsigned long PT); // с заданием интервала времени PT Q = TP1.Run(boolean IN); // вызов "все в одном" Функциональный блок R_TRIG генерирует импульс по переднему фронту входного сигнала. Выход Q равен FALSE до тех пор, пока вход CLK равен FALSE. Как только CLK получает значение TRUE, Q устанавливается в TRUE. При следующем вызове функционального блока выход сбрасывается в FALSE. Таким образом, блок выдает единичный импульс при каждом переходе CLK из FALSE в TRUE. RTRIGInst : R_TRIG ; RTRIGInst(CLK:= VarBOOL1); VarBOOL2 := RTRIGInst.Q; Объявление: R_TRIG R_TRIG1; Варианты использования: Q = R_TRIG1.Run(boolean CLK); // вызов "все в одном" R_TRIG1.CLK = CLK; R_TRIG1.Run(); Q = R_TRIG1.Q; Функциональный блок F_TRIG генерирует импульс по заднему фронту входного сигнала. Выход Q равен FALSE до тех пор, пока вход CLK равен TRUE. Как только CLK получает значение FALSE, Q устанавливается в TRUE. При следующем вызове функционального блока выход сбрасывается в FALSE. Таким образом, блок выдает единичный импульс при каждом переходе CLK из TRUE в FALSE. F_TRIG F_TRIG1; Q = F_TRIG1.Run(boolean CLK); // вызов "все в одном" RS_TRIG — функциональный блок RS-триггер / SR_TRIG — функциональный блок SR-триггерПереключатель с доминантой выключения, RS-триггер: Q1 = RS (SET, RESET1) Переключатель с доминантой включения: Q1 = SR (SET1, RESET) Входные переменные SET и RESET1 — как и выходная переменная Q1 типа BOOL. RS_TRIG RS_TRIG1; Q = RS_TRIG1.Run(boolean SET, boolean RESET); // вызов "все в одном" SR_TRIG SR_TRIG1; Q = SR_TRIG1.Run(boolean SET, boolean RESET); // вызов "все в одном" digitalWrite(LED, TP2.Run(TON2.Run(!TON2.Q))); plcStandardLib_1.h /* * plcStandardLib_1.h * * Created on: 01.01.2017 * Author: Admin */ #ifndef PLCSTANDARDLIB_1_H_ #define PLCSTANDARDLIB_1_H_ #if ARDUINO >= 100 #include #else #include #endif /* ------------------- TON ------------------- */ class TON { public: TON(); TON(unsigned long PT); boolean Run(boolean IN); boolean Q; // выходная переменная boolean IN; // входная переменная unsigned long PT; // входная переменная unsigned long ET; // выходная переменная - текущее значение таймера private: boolean _M; // внутренний флаг unsigned long _StartTime; }; /* ------------------- TOF ------------------- */ class TOF { public: TOF(); TOF(unsigned long PT); boolean Run(boolean IN); boolean Q; // выходная переменная boolean IN; // входная переменная unsigned long PT; // входная переменная unsigned long ET; // выходная переменная - текущее значение таймера private: boolean _M; // внутренний флаг unsigned long _StartTime; }; /* ------------------- TP ------------------- */ class TP { public: TP(); TP(unsigned long PT); boolean Run(boolean IN); boolean Q; // выходная переменная boolean IN; // входная переменная unsigned long PT; // входная переменная unsigned long ET; // выходная переменная - текущее значение таймера private: boolean _M; // внутренний флаг unsigned long _StartTime; }; /* ------------------- R_TRIG ------------------- */ class R_TRIG // детектор фронта сигнала { public: R_TRIG(); boolean Run(boolean CLK); boolean CLK; // входная переменная boolean Q; // выходная переменная private: boolean _M; // внутренний флаг }; /* ------------------- F_TRIG ------------------- */ class F_TRIG // детектор спада сигнала { public: F_TRIG(); boolean Run(boolean CLK); boolean CLK; // входная переменная boolean Q; // выходная переменная private: boolean _M; // внутренний флаг }; /* ------------------- RS_TRIG ------------------- */ class RS_TRIG // детектор спада сигнала { public: RS_TRIG(); boolean Run(); boolean Run(boolean SET, boolean RESET); boolean SET; // установка триггера boolean RESET; // сброс триггера boolean Q; // выходная переменная //private: }; /* ------------------- SR_TRIG ------------------- */ class SR_TRIG // детектор спада сигнала { public: SR_TRIG(); boolean Run(); boolean Run(boolean SET, boolean RESET); boolean SET; // установка триггера boolean RESET; // сброс триггера boolean Q; // выходная переменная //private: }; #endif /* PLCSTANDARDLIB_H_ */ plcStandardLib_1.cpp /* * plcStandardLib_1.h * * Created on: 01.01.2017 * Author: Admin */ #include "plcStandardLib_1.h" /* ------------------- TON ------------------- */ TON::TON() { IN = false; PT = 0; _M = false; _StartTime = 0; Q = false; ET = 0; } TON::TON(unsigned long PT) { IN = false; TON::PT = PT; _M = false; _StartTime = 0; Q = false; ET = 0; } boolean TON::Run(boolean IN) { TON::IN = IN; if (!TON::IN) { Q = false; ET = 0; _M = false; } else { if (!_M) { _M = true; // взводим флаг М _StartTime = millis(); // ET = 0; // сразу = 0 } else { if (!Q) ET = millis() - _StartTime; // вычисляем время } if (ET >= PT) Q = true; } return Q; } /* ------------------- TOF ------------------- */ TOF::TOF() { IN = false; PT = 0; _M = false; _StartTime = 0; Q = false; ET = 0; } TOF::TOF(unsigned long PT) { IN = false; TOF::PT = PT; _M = false; _StartTime = 0; Q = false; ET = 0; } boolean TOF::Run(boolean IN) { TOF::IN = IN; if (TOF::IN) { Q = true; ET = 0; _M = true; } else { if (_M) { _M = false; // сбрасываем флаг М _StartTime = millis(); // ET = 0; // сразу = 0 } else { if (Q) ET = millis() - _StartTime; // вычисляем время } if (ET >= PT) Q = false; } return Q; } /* ------------------- TP ------------------- */ TP::TP() { IN = false; PT = 0; _M = false; _StartTime = 0; Q = false; ET = 0; } TP::TP(unsigned long PT) { IN = false; TP::PT = PT; _M = false; _StartTime = 0; Q = false; ET = 0; } boolean TP::Run(boolean IN) { TP::IN = IN; if (!_M) { if (TP::IN) { _M = true; // взводим флаг М _StartTime = millis(); if (ET < PT) Q = true; } } else { if (Q) { ET = millis() - _StartTime; // вычисляем время if (ET >= PT) Q = false; } else { if (!TP::IN) { _M = false; ET = 0; } } } return Q; } /* ------------------- R_TRIG ------------------- */ R_TRIG::R_TRIG() { CLK = false; _M = false; Q = false; } boolean R_TRIG::Run(boolean CLK) { R_TRIG::CLK = CLK; Q = R_TRIG::CLK && !_M; _M = R_TRIG::CLK; return Q; } F_TRIG::F_TRIG() { CLK = false; _M = true; Q = false; } boolean F_TRIG::Run(boolean CLK) { F_TRIG::CLK = CLK; Q = !F_TRIG::CLK && !_M; _M = !F_TRIG::CLK; return Q; } /* ------------------- RS_TRIG ------------------- */ RS_TRIG::RS_TRIG() { SET = false; RESET = false; Q = false; } boolean RS_TRIG::Run(boolean SET, boolean RESET) { RS_TRIG::SET = SET; RS_TRIG::RESET = RESET; Q = !RESET and (SET or Q); return Q; } boolean RS_TRIG::Run() { Q = !RESET and (SET or Q); return Q; } /* ------------------- SR_TRIG ------------------- */ SR_TRIG::SR_TRIG() { SET = false; RESET = false; Q = false; } boolean SR_TRIG::Run(boolean SET, boolean RESET) { SR_TRIG::SET = SET; SR_TRIG::RESET = RESET; Q = SET or (!RESET and Q); return Q; } boolean SR_TRIG::Run() { Q = SET or (!RESET and Q); return Q; } plcStandardLib_1_example.ino #include "plcStandardLib_1.h" #define LED 13 #define ButtonIn 7 TON TON1(500); // Инициализация задержки включения, 500мс. TON TON2(1000); // Инициализация задержки включения, 1000мс. TOF TOF1(500); // Инициализация задержки выключения, 500мс. TP TP1(300); // Инициализация единичного импульса, 300мс. TP TP2(200); // Инициализация единичного импульса, 200мс. R_TRIG R_TRIG1; // Инициализация триггера фронта для кнопки void setup() { pinMode(ButtonIn, INPUT_PULLUP); pinMode(LED, OUTPUT); } void loop() { digitalWrite(LED, TP1.Run(R_TRIG1.Run(TON1.Run(digitalRead(ButtonIn))))); // TON1 - фильтрует дребезг контакта // R_TRIG1 - детектирует фронт сигнала // TP1 - генерирует импульс по фронту digitalWrite(LED, TP2.Run(TON2.Run(!TON2.Q))); // генератор импульса на базе TON и TP // TON2.Run(!TON2.Q)) - генератор единичного импульса // TP2 - генерирует импульс по фронту digitalWrite(LED, TOF1.Run(TON1.Run(digitalRead(ButtonIn)))); // Задержка включения и отключения } 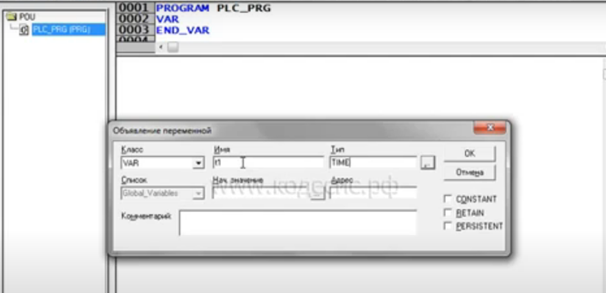 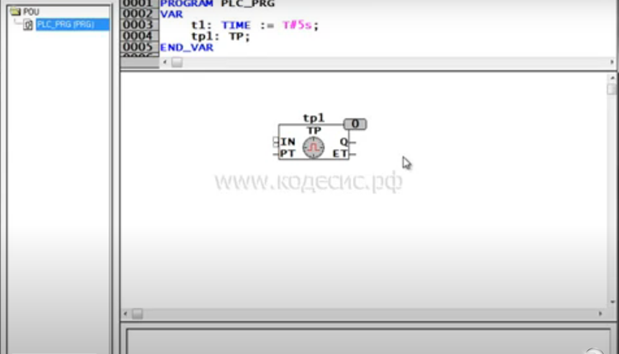  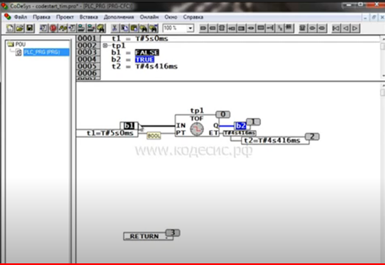 |