Курсовая сурков. Пояснительная записка к курсовой работе по дисциплине Основы автоматизированного вентильного электропривода Тема Синтез регулятора нелинейной системы управления Автор работы Шибякин О. А. подпись Группа 121241
 Скачать 59.17 Kb. Скачать 59.17 Kb.
|

|
МИНОБРНАУКИ РОССИИ Федеральное государственное бюджетное образовательное учреждение высшего образования «Тульский государственный университет» Институт высокоточных систем имени В.П. Грязева Кафедра «Электротехника и электрооборудование» ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовой работе по дисциплине «Основы автоматизированного вентильного электропривода» Тема «Синтез регулятора нелинейной системы управления» Автор работы: Шибякин О. А. _____________ подпись Группа: 121241 Руководитель работы: Сурков В.В. _____________ подпись Работа защищена: ______________ Оценка_____________ дата Тула 2017 Содержание Введение Задача синтеза нелинейных регуляторов весьма актуальна в настоящее время. В реальности все объекты управления являются существенно нелинейными, а требования к современным системам автоматического управления (САУ) возросли настолько, что без учета нелинейностей обеспечить требуемое качество процессов управления невозможно. Другим фактором, обусловливающим актуальность задачи синтеза нелинейных регуляторов, является широкое развитие и распространение компьютерных технологий, которые позволяют, во-первых, синтезировать, а во-вторых, реализовать весьма сложные законы управления, необходимые для управления нелинейными объектами достаточно общего вида. Практически задача построения САУ сводится к разработке математической модели, а затем и реализации регулятора. Именно регулятор определяет все основные динамические свойства САУ, её точность и эффективность управляемого процесса. Методы анализа и синтеза нелинейных систем разрабатывались и исследовались в работах многих ученых таких как: А.М. Ляпунов, Р. Калман, А.А. Воронов, А.А. Красовский, А.П. Крищенко, С.В. Емельянов, В.И. Уткин, А.Л. Фрадков, Е.А. Барбашин, А.А. Вавилов, В.Н. Буков, В.Н. Рябченко, П.К. Кузнецов, Л.Д. Певзнер, С.В. Тарарыкин, Р.А. Нейдорф, В.И. Лачин, А.Р. Гайдук, В.А. Подчукаев, Н.Б. Филимонов, П.П. Кравченко, В.В. Тютиков и др. Однако, практически все известные методы синтеза нелинейных регуляторов применимы лишь для нелинейных объектов отдельных классов. Поэтому в настоящее время проблема разработки и исследования достаточно общих методов синтеза регуляторов для нелинейных объектов находится в центре внимания ученых различных стран мира. 1 Исследование нелинейной системы на устойчивостьСудить об устойчивости решений нелинейных дифференциальных уравнений на основании теорем Ляпунова, по дифференциальным уравнениям линеаризованных систем, можно только при малых отклонениях от установившегося движения, т е. можно судить только об устойчивости в малом. Между тем, нелинейная система, устойчивая в малом, может быть неустойчивой при больших отклонениях. Различают, кроме устойчивости в малом, следующие виды устойчивости нелинейных систем. Система называется устойчивой в большом, если она устойчива при больших конечных по величине отклонениях. Система называется устойчивой в целом, если она устойчива при любых, не ограниченных по величине, начальных отклонениях. Если система асимптотически устойчива в целом, то ее называют абсолютно устойчивой. Особенностью нелинейных систем является возникновение в них, при некоторых начальных условиях, гармонических колебаний с определенной амплитудой и частотой, так называемых предельных циклов. Если предельный цикл устойчив, т.е. к нему сходятся все траектории сверху и снизу в определенном диапазоне начальных условий, то он называется автоколебаниями. Амплитуда и частота автоколебаний зависят только от параметров системы. Дана нелинейная система с дифференциальными уравнениями, записанными с помощью канонического вектора состояния:  Требуется установить устойчивость данной системы. Для начала составим структурную схему данного объекта: 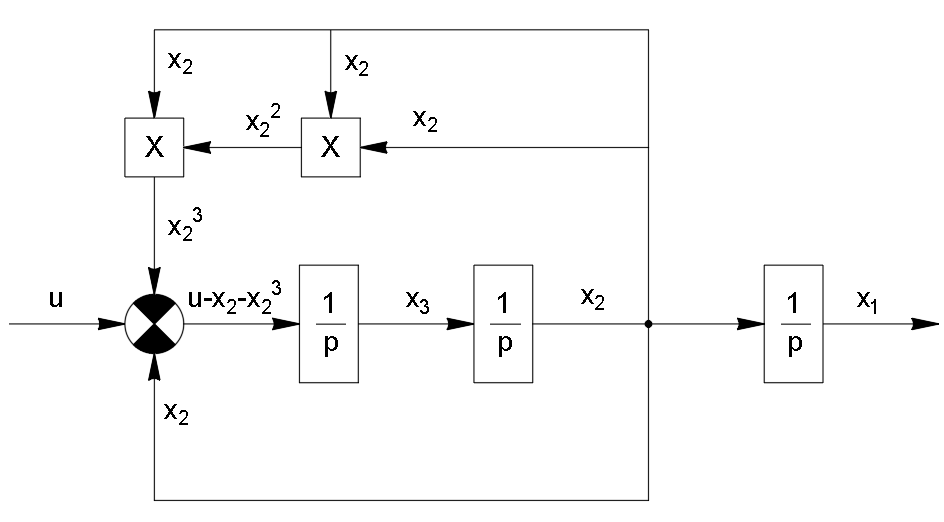 Рисунок 1 – Структурная схема нелинейного объекта Промоделируем данную систему в matlabe 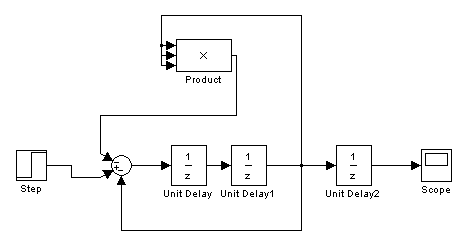 Рисунок 2 – Схема нелинейного объекта в среде matlab 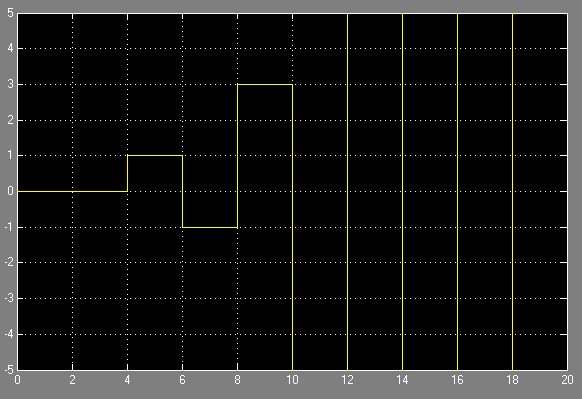 Рисунок 3 – Переходная функция объекта Из графика переходной функции видно, что объект является неустойчивым. 2 Метод динамического программирования Беллмана с управляющим сигналомДинамическое программирование - один из наиболее мощных современных методов оптимизации. Основной областью его применения являются многошаговые процессы, т. е. процессы, развивающиеся во времени, что дало основание назвать этот метод "динамическим". Возникновение динамического программирования связывают с именем американского ученого Р. Беллмана, который в начале пятидесятых годов прошлого столетия предложил принцип последовательного анализа вариантов, названный впоследствии принципом оптимальности. Динамическое программирование опирается также на идею погружения оптимизационной задачи в семейство подобных ей задач. Благодаря этому приему, названному принципом инвариантного погружения, метод применим ко многим задачам, которые в исходной постановке не являются динамическими. Особенностью динамического программирования, выделяющей его среди других методов оптимизации, является форма конечного результата. Выигрыш при применении этого метода состоит прежде всего в том, что исходная задача разбивается на рад более простых задач. Эффект от применения динамического программирования к конкретной задаче оптимизации характеризуется тем, насколько велико такое упрощение. Метод динамического программирования основывается на сформулированном Р. Беллманом принципе оптимальности. Этот принцип имеет место для систем, последующее движение которых полностью определяется состоянием этих систем в любой текущий момент времени. К таким системам относятся, например, системы, описываемые системой дифференциальных уравнений, где под состоянием подразумевается положение системы в фазовом пространстве, системы, описываемые уравнениями в конечных разностях с дискретным аргументом и др. Принцип оптимальности сформулирован Беллманом так: Оптимальное поведение обладает тем свойством, что, каковы бы ни были первоначальное состояние и решение в начальный момент, последующие решения должны составлять оптимальное поведение относительно состояния, получающегося в результате первого решения. Указанная формулировка принципа оптимальности (названного Беллманом интуитивным) относится к системам весьма общего вида. Для управляемых систем, описываемых системой дифференциальных уравнений, под «поведением» системы следует понимать движение этих систем, а термин «решение» относится к выбору закона изменения во времени управляющих сил. Если в понятие состояния системы в данный момент времени включить и предысторию изменения фазовых координат системы на интервале последействия, то сформулированный здесь принцип оптимальности будет справедлив и для систем с последействием, то есть для систем, описываемых дифференциально-разностными уравнениями. Для систем, описываемых системой дифференциальных уравнений, принцип оптимальности совпадает с хорошо известным фактом, что часть экстремали является снова экстремалью. Оптимизация многошаговых процессов с помощью динамического программирования включает в себя следующую последовательность действий:
Для нелинейной системы, которая описывается системой дифференциальных уравнений вида: (2.1)И квадратичного функционала качества:  применить метод динамического программирования Беллмана. Задача состоит в том, чтобы перевести объект, заданный системой (2.1) из начального состояния в конечное таким образом, чтобы функционал качества (2.2) принимал минимальное значение.  Принцип оптимальности определяет достаточно общее необходимое условие оптимальности динамических систем. Однако он не является всеобщим – принцип справедлив только для систем, у которых оптимальная траектория не зависит от предыстории системы, а целиком определяется исходным ее состоянием. Например, принцип оптимальности не справедлив для объектов управления при наличии запаздывания в фазовых координатах. Минимальное значение критерия, соответствующее оптимальному управлению, обозначим символом  Данная функция зависящая только от начального состояния объекта называется функцией Беллмана. Подчеркнем, что здесь зависимость функционала от конечного состояния объекта, которое в задачах управления часто фиксировано, не рассматривается. Используя сформулированный принцип оптимальности, можно показать, что функция Беллмана для объекта с функционалом качества удовлетворяет следующему функциональному уравнению Беллмана:  где  |