Курсовая по Деталям машин. курсовая. Пояснительная записка к курсовому проекту по курсу Детали машин и основы конструирования
 Скачать 2.98 Mb. Скачать 2.98 Mb.
|

 МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное автономное образовательное учреждение высшего профессионального образования «Южно-Уральский государственный университет» (национальный исследовательский университет) Политехнический институт, кафедра «Техническая механика» ПРИВОД ЛЕБЁДКИ Пояснительная записка к курсовому проекту по курсу Детали машин и основы конструирования П338.КП.025.00.000 ПЗ  Нормоконтролер _______________ 2021г. Руководитель Зарезин А.А. _______________2021г. Автор проекта студент группы П-338 Гузанов Н.А. _______________2021г. Проект защищен с оценкой ________________ ________________2021г. Оглавление1 Кинематический и силовой расчет привода 5 1.1Расчет параметров вала исполнительного механизма. 6 1.2Расчёт параметров электродвигателя. 6 1.3. Параметры привода в целом. 9 1.4. Выбор редуктора. 11 1.5. Основные расчетные характеристики привода. 12 2Проектный Расчет Открытой конической зубчатой передачи на выносливость зубъев по изгибу 14 Внешний окружной модуль зацепления 14 Средний нормальный модуль 16 Коэффициент смещения исходного контура 17 Геометрические размеры зубчатых колес с ПРЯМЫМИ зубьями формы I 17 Проверочный расчет открытой цилиндрической зубчатой передачи на выносливость зубьев по изгибу 19 Удельная расчетная окружная сила 19 Коэффициент формы зуба и концентрации напряжений 22 Коэффициент, учитывающий наклон зуба 23 Коэффициент, учитывающий особенности прочности конических передач 23 Заключение 24 Баблиографический список 25 ТЕХНИЧЕСКОЕ ЗАДАНИЕ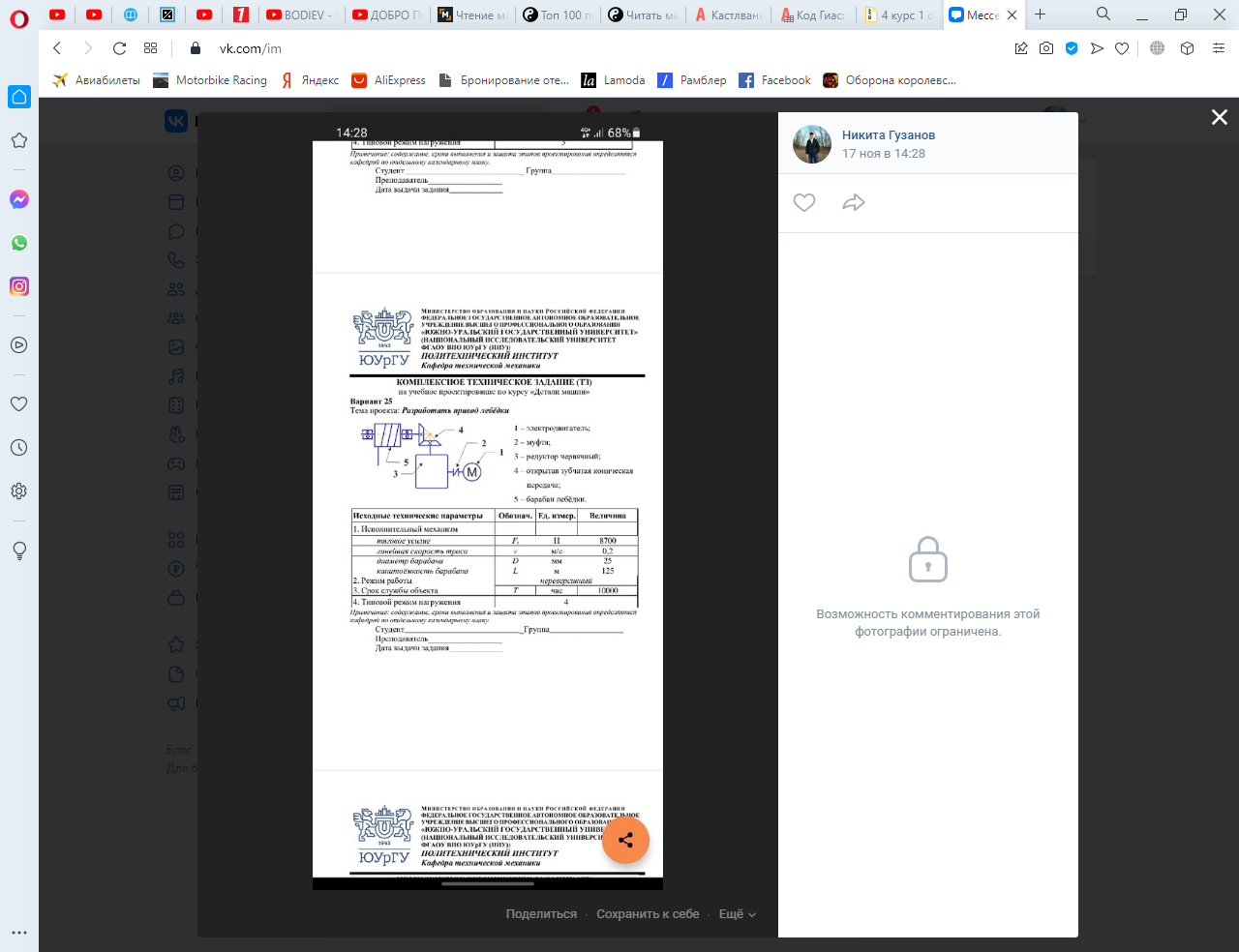 Введение Целью данного курсового проекта является проектирование привод лебёдки на основании комплексного технологического задания. Привод включает в себя электродвигатель, редуктор червячный, открытую коническую зубчатую передачу, муфту и исполнительный механизм –барабан лебёдки. В рамках данного курсового проекта проводится расчет и выбор требуемого электродвигателя, выбор редуктора, расчет вала исполнительного механизма, и расчет цепной передачи. Редукторы классифицируются по следующим признакам: по типу передач (зубчатые, червячные или зубчато-червячные, по числу ступеней (одноступенчатые, многоступенчатые); по типу колёс (цилиндрические, конические, коническо-цилиндрические); по расположению валов в пространстве (горизонтальные, вертикальные). 1 Кинематический и силовой расчет приводаРасчет привода выполняется на основании исходных данных технического задания (см. стр. 4), в соответствии со схемой, представленной на рис. 1.1. 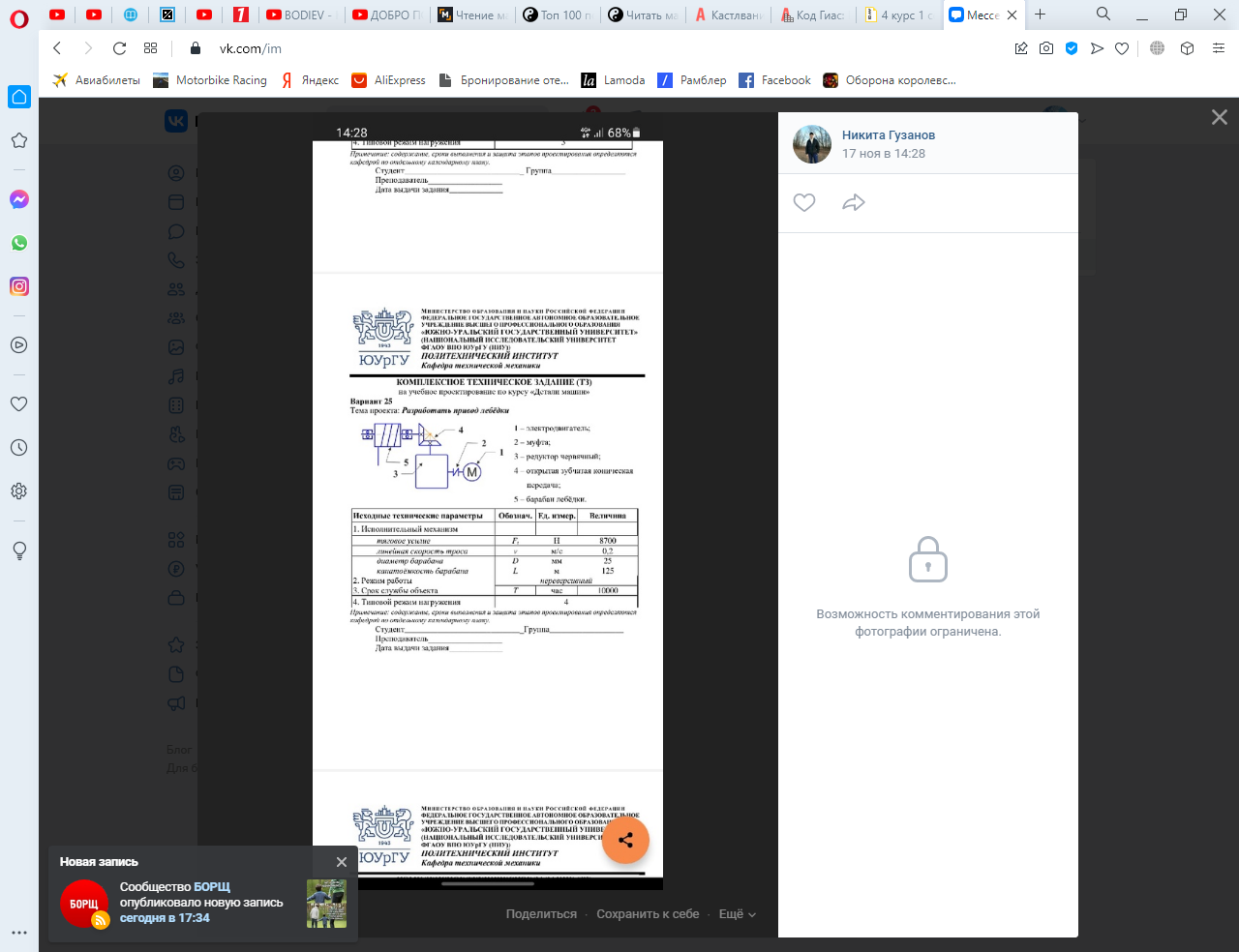 Рисунок 1.1 – Схема привода лебёдки. Основные параметры привода: Вращающий момент Ft= 8700, Н*м Линейная скорость цепи Vt = 0,2 м/c Диаметр барабана D= 125 Канатоёмкость барабана L = 125, мм Ресурс t = 10000 ч Типовой режим нагружения – 4 Реверсивность – нереверсивная Расчет, выполненный с использованием программы SMath Studio, приведен в Приложении А. Расчет параметров вала исполнительного механизма.Частота вращения вала исполнительного механизма, об/мин  Требуемая мощность на валу исполнительного механизма, кВт  Требуемый вращающий момент на валу исполнительного механизма, Н·м  Расчёт параметров электродвигателя.Требуемая мощность двигателя определяется по мощности на исполнительном механизме с учётом потерь, происходящих в приводе, которые определяет общий КПД -  КПД редуктора [1],  КПД цепной передачи равен [1] ,  КПД привода, с учетом того, что КПД муфты и подшипников принимаем равными единице.  Требуемая мощность двигателя с учётом общего КПД должна быть равной:  Диапазон оптимальных частот вращения вала электродвигателя определим исходя из оптимальных значений передаточного отношения открытой передачи и редуктора. Диапазон оптимальных передаточных отношений зубчатой передачи равен [1]:  Диапазон оптимальных передаточных отношений редуктора равен [1,4]:  . .Диапазон оптимальных передаточных отношений привода определяется как произведение:  Диапазон оптимальных частот вращения электродвигателя определяется как произведение частоты вращений исполнительно механизма на диапазон оптимальных передаточных отношений привода:  Синхронная частота вращения магнитного поля статора электродвигателя выбирается в соответствии с диапазоном оптимальных частот вращения вала электродвигателя из стандартного ряда значений [1]. Выбор электродвигателя осуществляется по частоте вращения вала электродвигателя и требуемой мощности по каталогу производителей электродвигателей [3]. Выбранная частота вращения магнитного поля статора асинхронного двигателя, об/мин:  Коэффициент скольжения асинхронного двигателя s = 0,04. Расчетная частота вращения вала электродвигателя, об/мин:  Требуемая мощность, кВт:  Характеристики электродвигателей, полученные в [3] приведены на рис. 1.2  Рисунок 1.2 – Технические характеристики асинхронных трехфазных двигателей общего применения 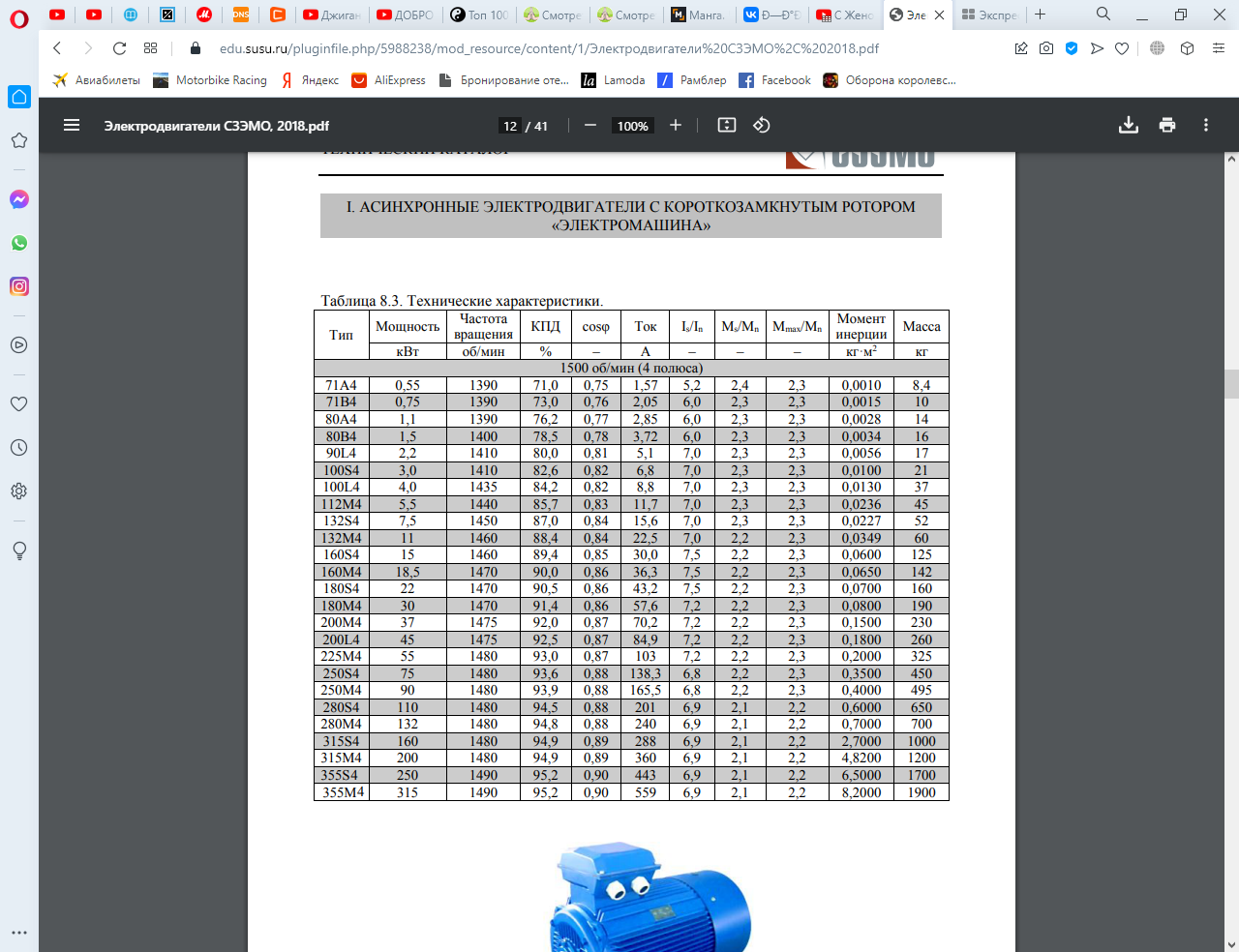 Pдв.расч. =  кВт и nдв.расч. = 1500 был выбран асинхронный электродвигатель "АИР100S4» со следующими параметрами: кВт и nдв.расч. = 1500 был выбран асинхронный электродвигатель "АИР100S4» со следующими параметрами:Номинальная частота вращения электродвигателя, об/мин – 1410; Мощность электродвигателя, кВт – 3; Номинальный вращающий момент, Н∙м –  ; ;Пусковой момент, Н∙м –  Максимальный момент, Н∙м –  Масса двигателя равна mдв. = 21 кг. Габаритные, установочные и присоединительные размеры двигателя приведены на рис 1.3[3]. 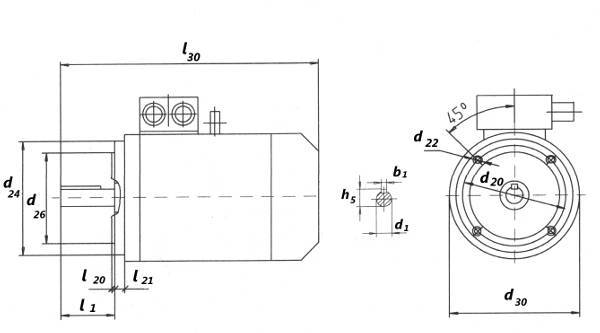  Рисунок 1.3. Эскизы размеров. 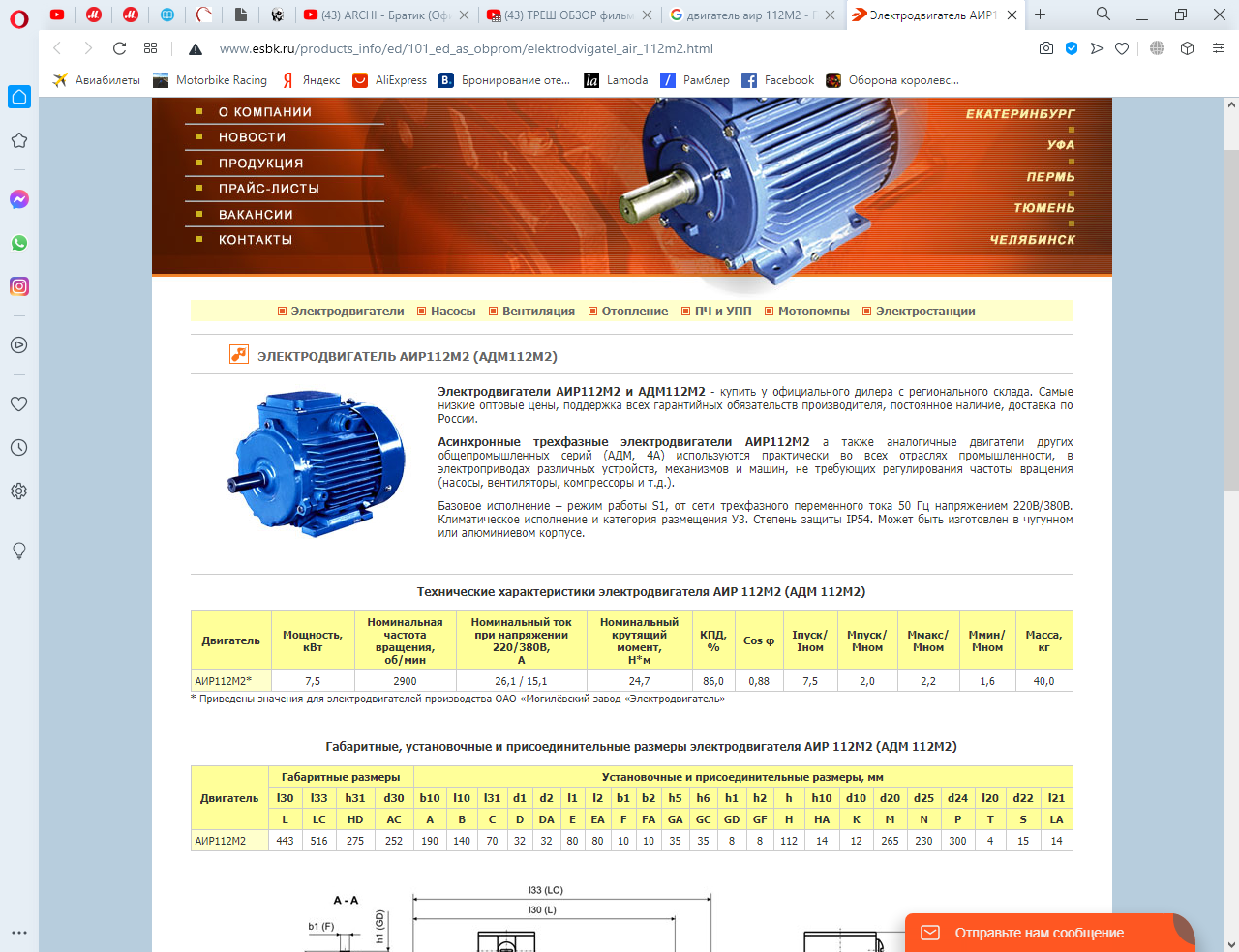 1.3. Параметры привода в целом.Находим расчетное (требуемое) передаточное отношение привода -  Стандартные значения передаточных отношений цилиндрического редуктора [1, 4]: Возможные передаточные отношения открытой передачи:  Выбираем значение в диапазоне оптимальных передаточных отношений редуктора и передачи. Также стараемся выбрать так, чтобы отношение редуктора было больше передачи. Итоговое выбранное передаточное отношение редуктора – iред.= 20; Итоговое передаточное отношение открытой цепной передачи – iот. = 2,31; Итоговое передаточное отношение привода находится как произведение передачи и редуктора - i.пр = 46,2 Различие между требуемым и итоговым составляет:  Различие не более 3 процентов значит отношения выбраны верно. В моём случае быстроходной ступенью является редуктор, а тихоходной передача.   Итоговые частоты вращения валов определяем по выражению, об/мин:  Рассчитанные частоты вращения валов: 1 - вал электродвигателя – n1 = 1410 об/мин; 2 - промежуточный вал – n2 = 70.5 об/мин 3 - вал исполнительного механизма – n3 = 30.5195 об/мин. Погрешность итоговой частоты вращения вала исполнительного механизма от требуемой:  Мощности на валах определяются с учетом потерь:  Мощности на валах, кВт: 1 - вал электродвигателя – P1= 2.4387; 2 - промежуточный вал – P2 = 1.951; 3 - вал исполнительного механизма – P3 = 1.8144 Вращающие моменты на валах определяются по мощности и частотам вращения соответствующих валов:  Вращающие моменты на валах, Н∙м: 1 - вал электродвигателя – T1 = 16.5175; 2 - промежуточный вал – T2 = 264.28; 3 - вал исполнительного механизма – T3 = 567.7528. Вращающий момент на последнем валу T3 должен быть больше или равен чем требуемый по техническому заданию на валу исполнительного механизма Tим. T3>Tим. Тим. = 800 Н∙м Условие соблюдается. 1.4. Выбор редуктора.Выбор редуктора осуществляется упрощенно по передаточному отношению и вращающему моменту на его тихоходном валу в соответствии с каталогом ТПК Редуктор [4]. iред. = 20 ; T2 = 567.7528 Н∙м. Требуемым параметрам соответствует редуктор: "NMRV - 90" со следующими характеристиками: Межосевое расстояние, мм – a.ред_w = 90; Допустимый вращающий момент на тихоходном валу редуктора, Н∙м–Tред.вых. = 304 Н∙м;  Рисунок 1.5. – Технические характеристики редутора. 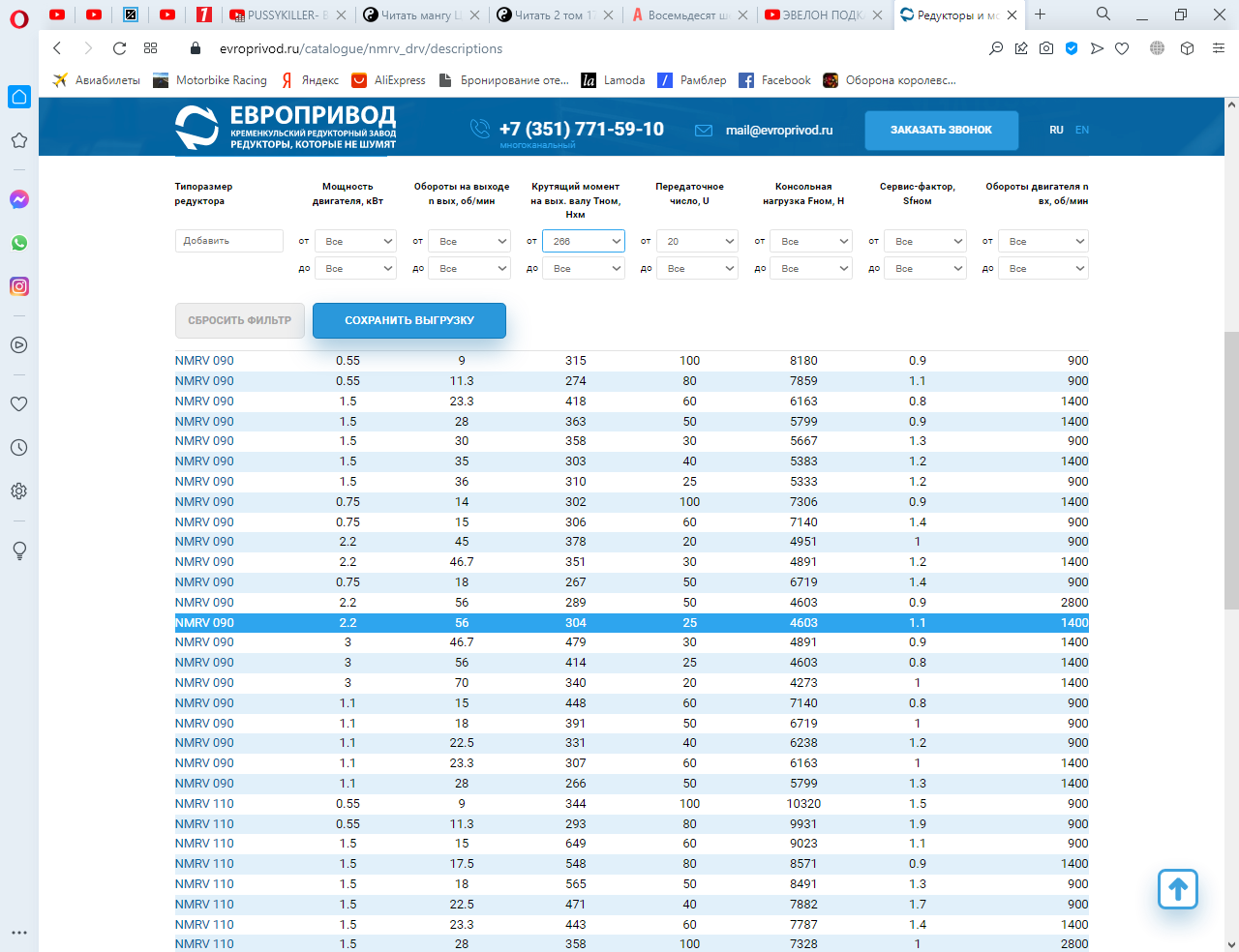 Радиальная консольная нагрузка на выходном валу, Н –F.ред_вых = 4603; Габаритные, установочные и присоединительные размеры редуктора, приведены.  Рисунок 1.6 – Габаритные и установочные размеры редуктора 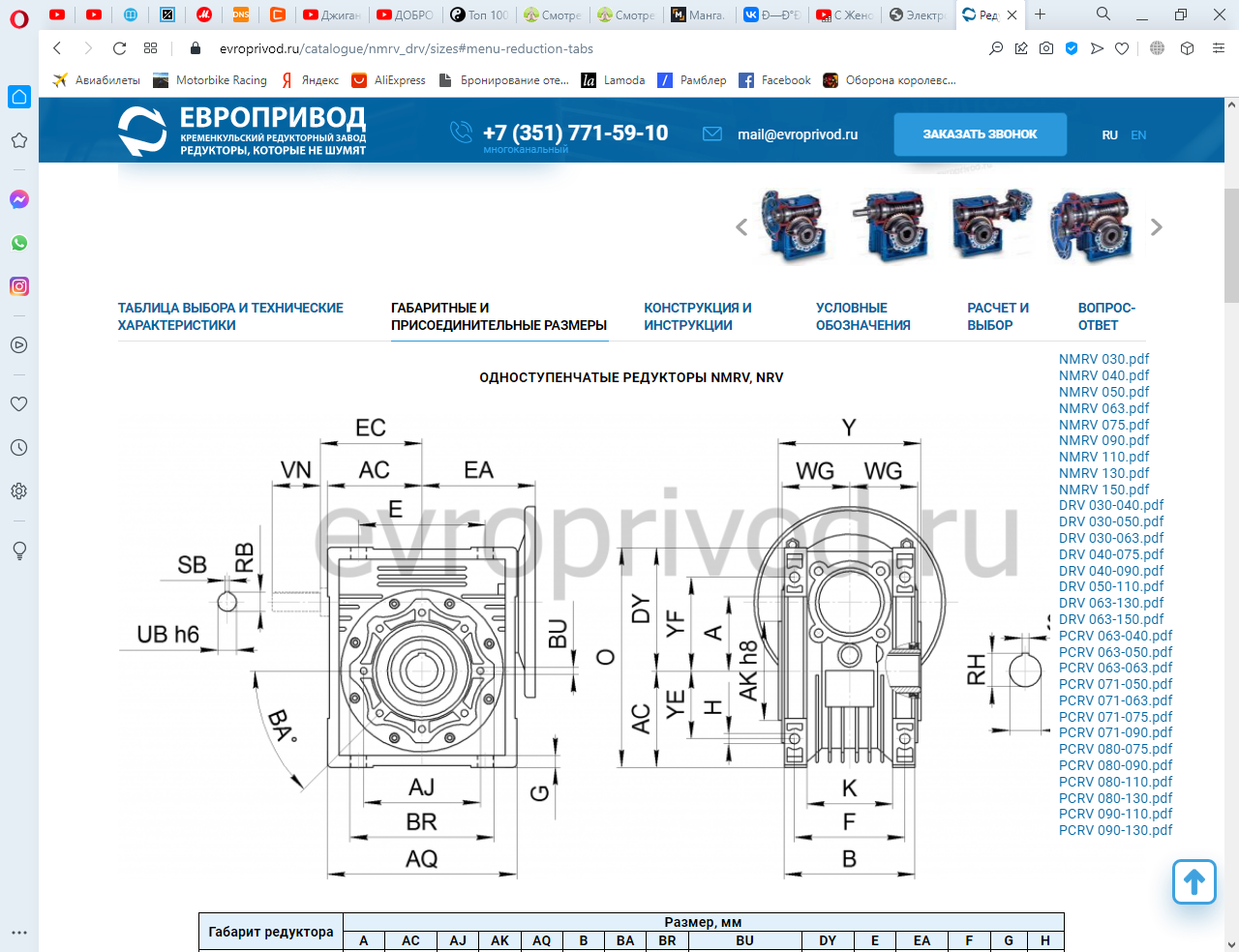 1.5. Основные расчетные характеристики привода.Характеристики узлов привода, полученные в результате выполнения кинематического и силового расчета, приведены в табл. 1.1. Таблица 1.1 – Характеристики узлов привода
Результаты расчета характеристик для всех валов привода приведены в табл. 1.2. Таблица 1.2 – Силовые и кинематические параметры привода
Проектный Расчет Открытой конической зубчатой передачи на выносливость зубъев по изгибу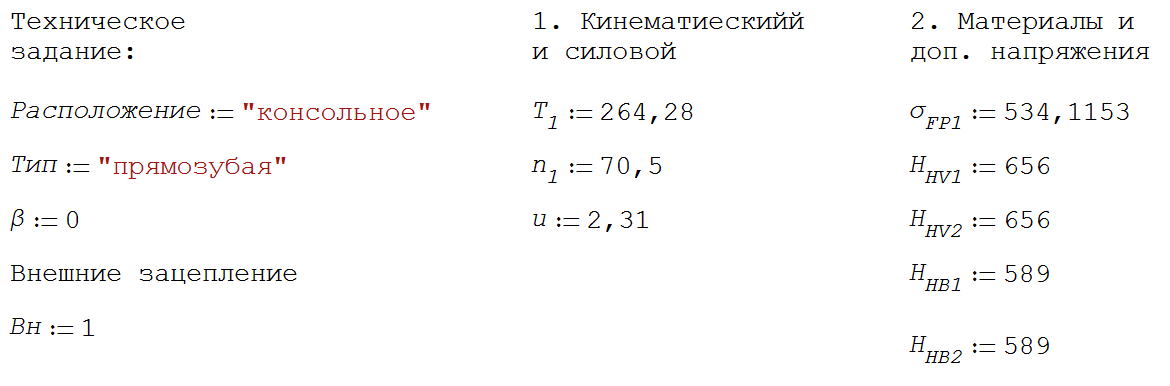 Внешний окружной модуль зацепления Угол делительного конуса шестерни (предварительный) Число зубьев  Передаточное число (уточненное)  Угол делительного конуса шестерни (уточненный) 1.2. Коэффициент ширины зубчатого венца  1.3. Коэффициент неравномерности распределения нагрузки по длине контактных линий   Рисунок 2.1 – График для определения коэффициента KFβ 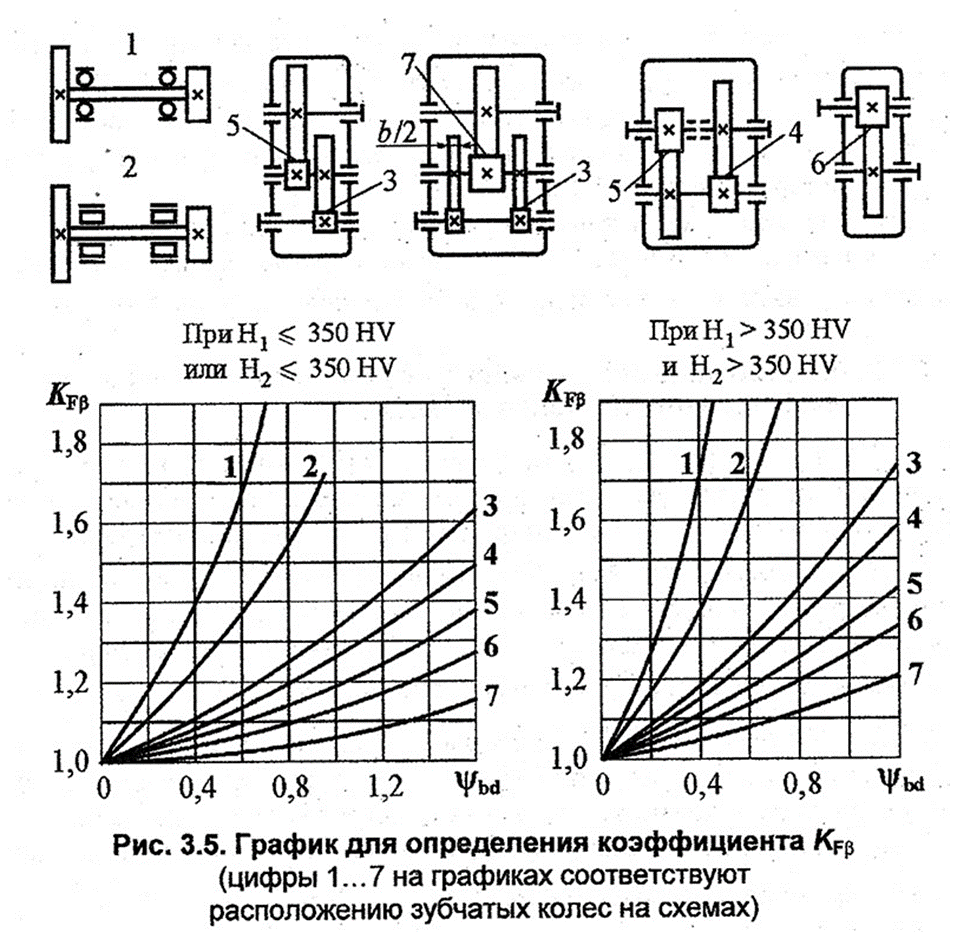 1.4. Коэффициент, учитывающий форму зуба шестерни и концентрацию напряжений   Рисунок 2.2 – График для определения коэффициента γFS 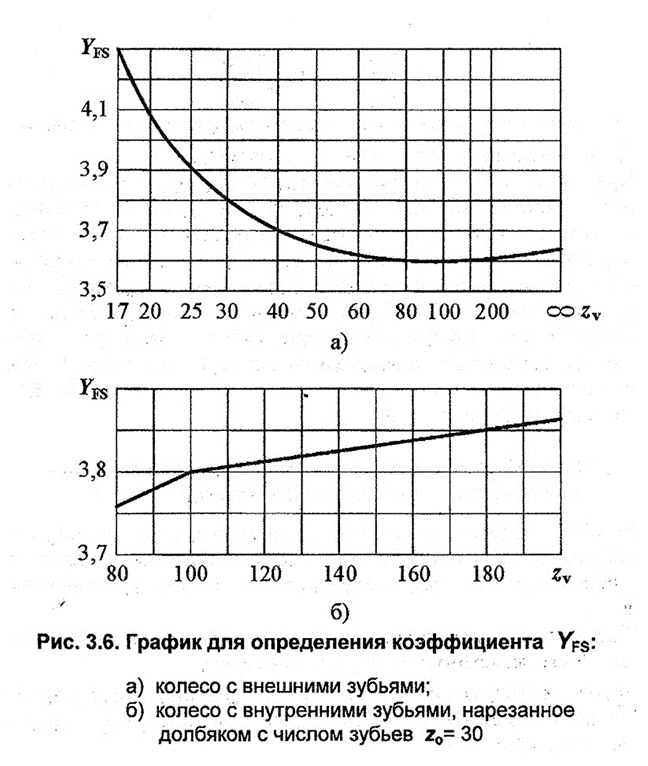 1.5. Вспомогательный коэффициент, для прямозубой передачи Km = 16 Внешний окружной модуль зацепления  Согласуем модуль с ГОСТОМ 5963-80 Средний нормальный модульКоэффициент смещения исходного контура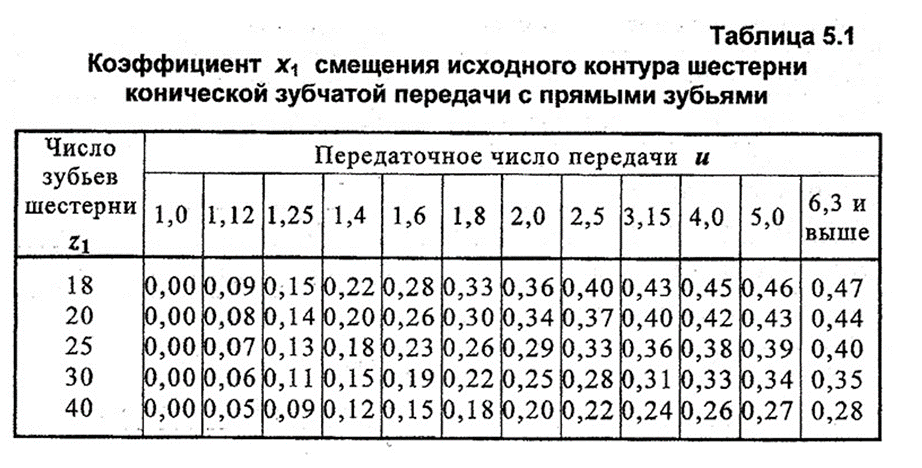  Геометрические размеры зубчатых колес с ПРЯМЫМИ зубьями формы I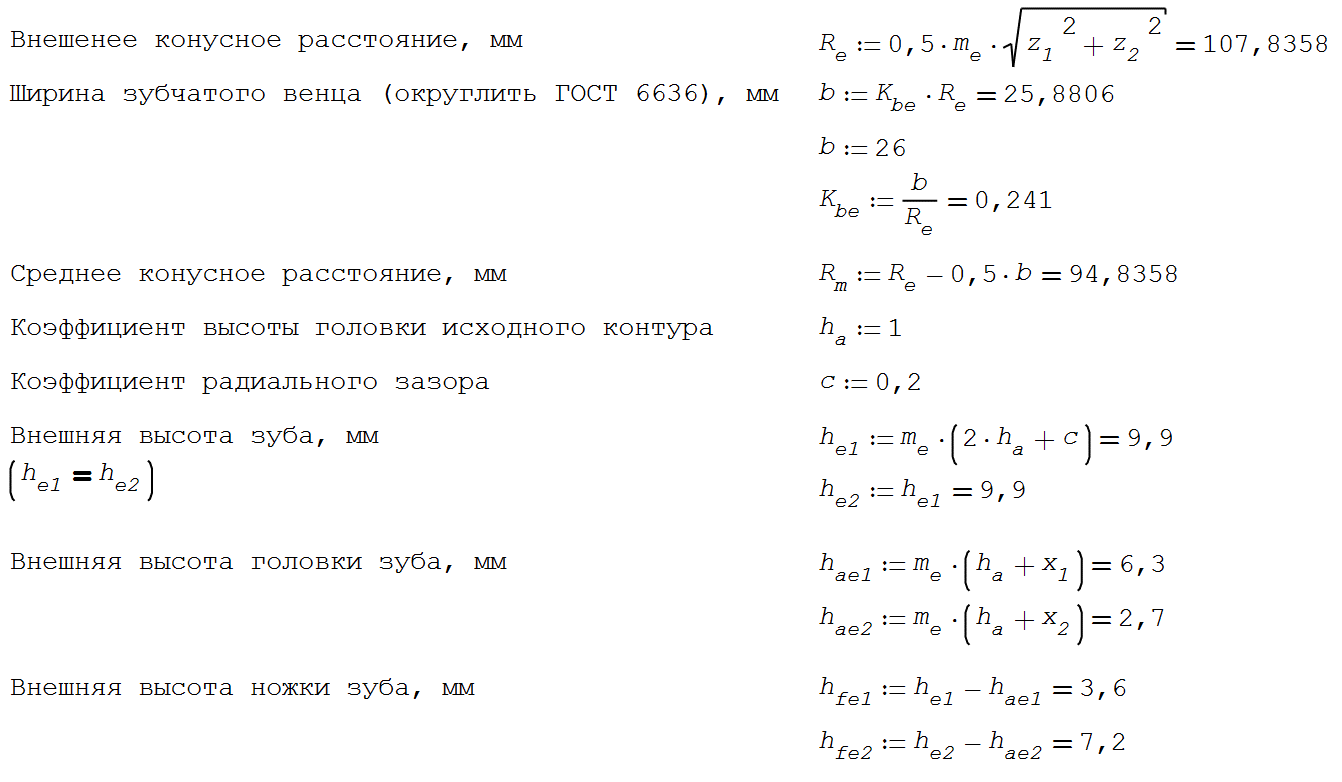 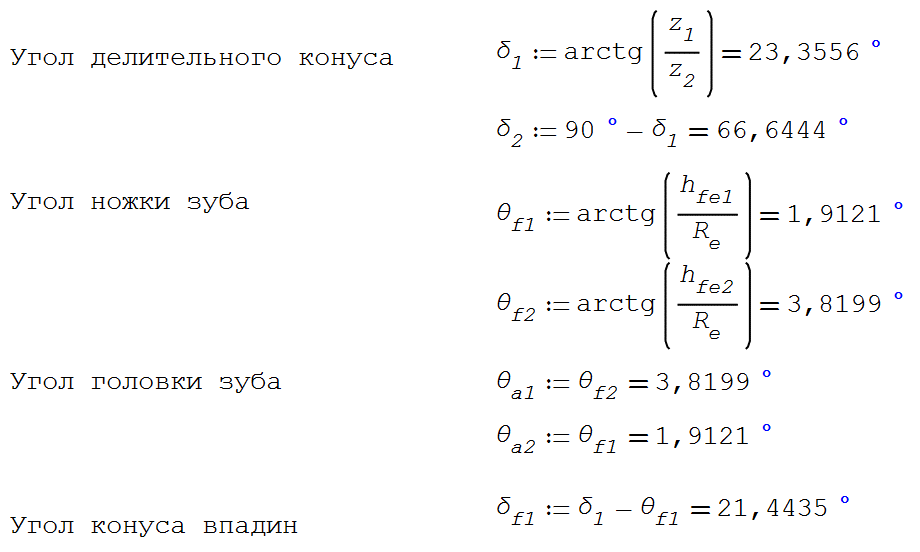 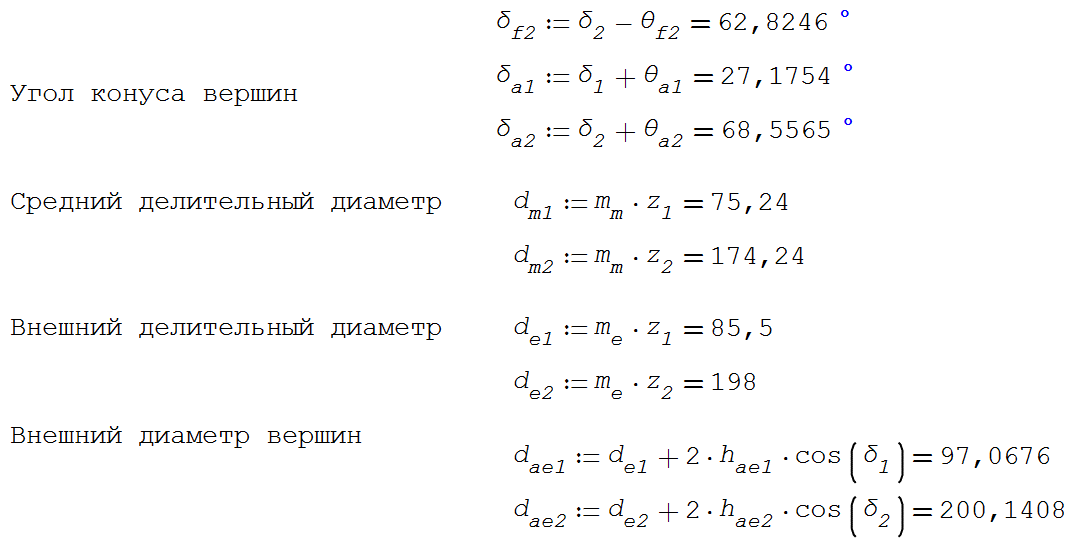 Проверочный расчет открытой цилиндрической зубчатой передачи на выносливость зубьев по изгибу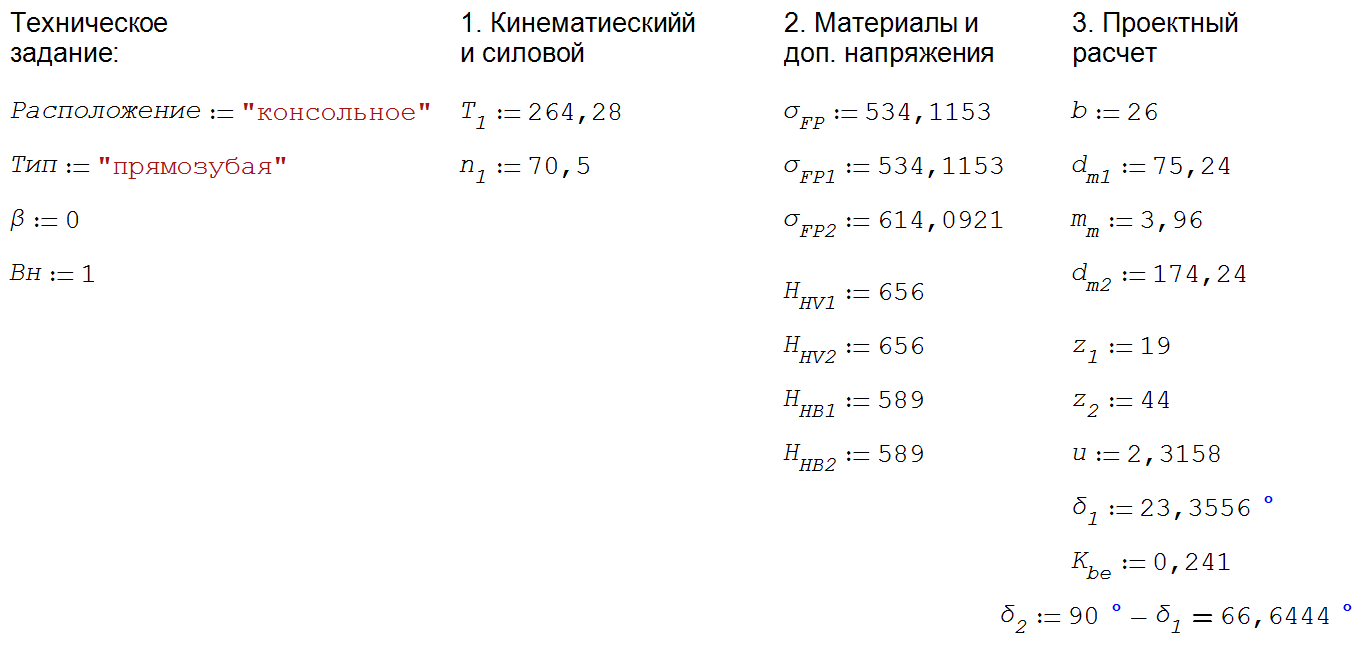  Удельная расчетная окружная сила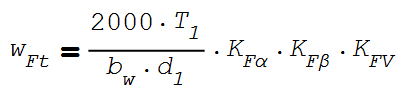  Рисунок 2.3 – график для определения коэффициента Kfß  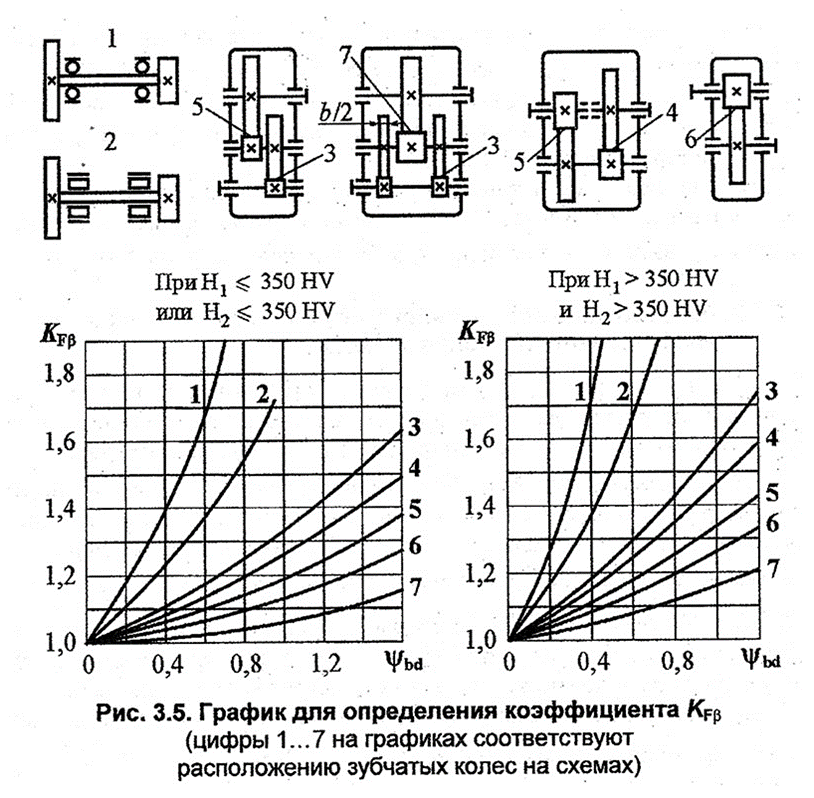 1.2. Коэффициент, учитывающий динамическую нагрузку в зацеплении 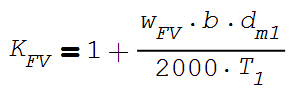 1.2.1. Удельная окружная динамическая сила при расчете на изгиб, Н/мм 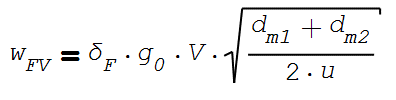 Окружная скорость в зацеплении, м/c  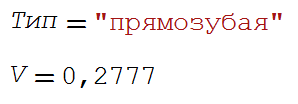  Рисунок 2.4 – выбор степени точности зубчатых передач 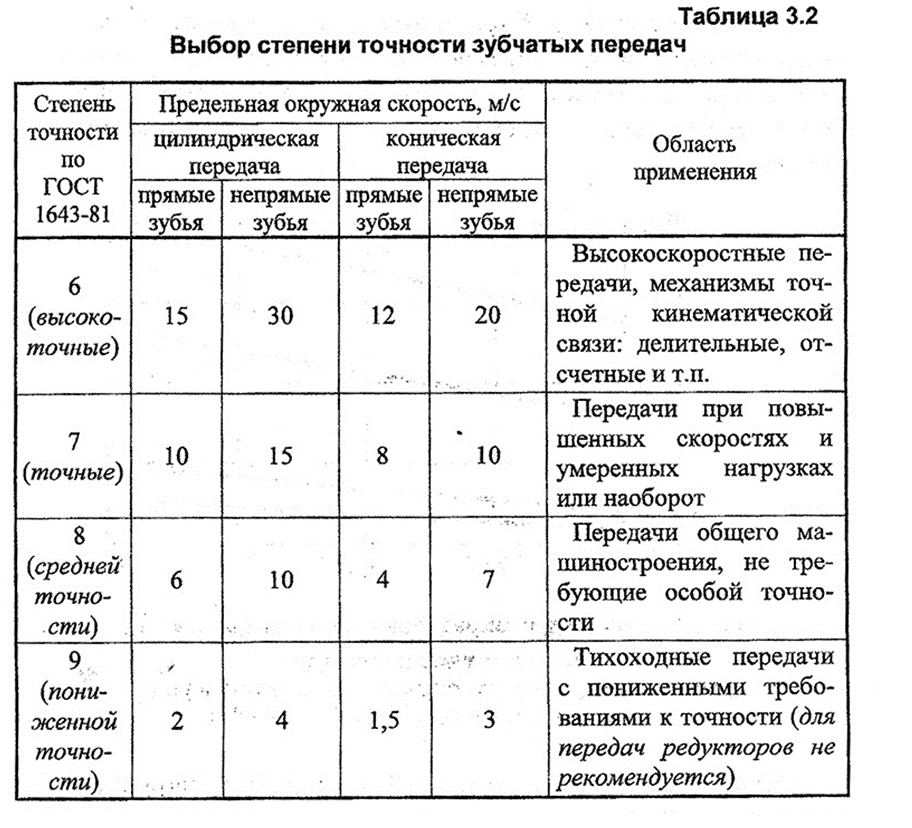 1.2.2. Коэффициент вида зубчатой передачи и модификации профиля зуба 1.2.3. Коэффициент разности шагов зацепления зубьев шестерни и колеса  Рисунок 2.5 - Коэффициент g0  Удельная окружная динамическая сила, Н/мм 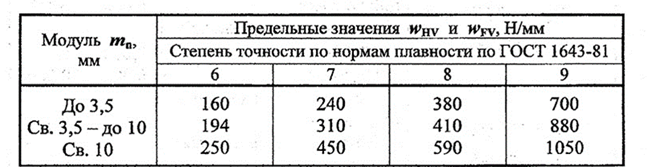 Рисунок 2.6 – удельная окружная динамическая сила Коэффициент, учитывающий динамическую нагрузку в зацеплении Удельная расчетная окружная сила, Н/мм 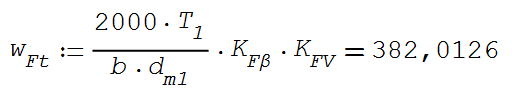 Коэффициент формы зуба и концентрации напряженийЭквивалентное число зубьев 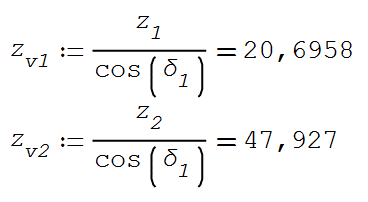 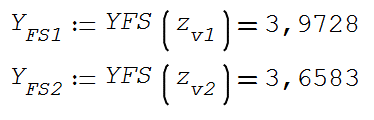  Коэффициент, учитывающий наклон зубаКоэффициент, учитывающий особенности прочности конических передачРасчетные напряжения изгиба, Мпа 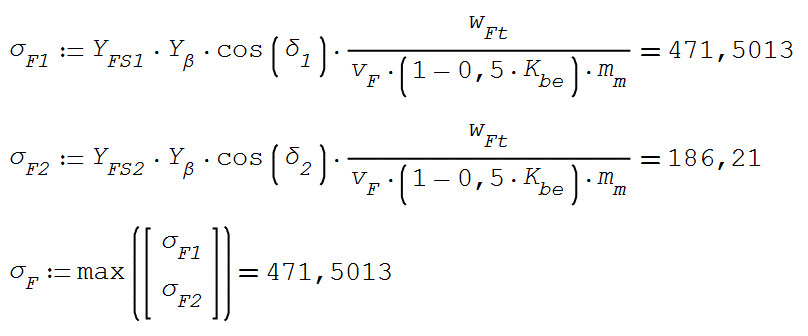 Меньшее значение указывает на слабое звено Расчет напряжений изгиба определяют по менее прочному звену  Проверка условия прочности  ЗаключениеВ ходе курсового был просчитан и спроектирован привод лебёдки, проведены расчёты для выбора редуктора и электродвигателя, выбраны соответствующие материалы также рассчитаны все вышеуказанные передачи и проведены проверочные расчёты. Преимущества открытой передачи: плавность работы; бесшумность; компенсация неточности установки шкивов редуктора, особенно по углу скрещивания между валами, вплоть до применения передачи между перемещаемыми валами; компенсация перегрузок (за счёт проскальзывания). В результате проектировочных расчетов получены конкретные параметры деталей механизма, участвующих в передаче движения. Баблиографический списокУстиновский Е.П. Детали машин и основы конструирования: курс лекций / Е.П. Устиновский, Е.В. Вайчулис; под ред. Е.П. Устиновского. – Челябинск: Издательский центр ЮУрГУ, 2019. – 220 с. Устиновский Е.П., Вайчулис Е.В.,Ковнацки А.В. Проектирование цепных передач с применением ЭВМ / Под. ред. Е.П.Устиновского. Челябинск: Изд-во ЮУрГУ, 2017 Черногоров Е.П. Кинематический и силовой расчет привода - http://surl.li/owcj Каталог редукторов. Официальный сайт ТПК Редуктор. URL: https://www.evroprivod.ru/catalogue/horizontal/1cu/descriptions/ Готовцев А.А., Котенок И.П. Проектирование цепных передач.- М. :Машиностроение, 1982  Челябинск, 2021 |