Практика 1 ЭСА. ЭЭТ КиИТПиПЭТК ПР1. Практическая работа 1 синтез комбинационных логических схем
 Скачать 1.69 Mb. Скачать 1.69 Mb.
|

 Министерство науки и высшего образования РФ ФГБОУ ВО «Уральский государственный горный университет» Кафедра автоматики и компьютерных технологий ПРАКТИЧЕСКАЯ РАБОТА 1 СИНТЕЗ КОМБИНАЦИОННЫХ ЛОГИЧЕСКИХ СХЕМ Дисциплина: Компьютерные и информационные технологии проектирования и производства электротехнических комплексов Вариант 14 Группа: ЭЭТ.м-22 Студент: Усов Д. В. г. Екатеринбург, 2023 г. Содержание 1. Теоретическая часть 2 1.1 Описание дискретной системы автоматического управления 2 1.3 Свойства логических операций 8 1.4 Основные формы логических выражений 9 2. Практическая часть 10 2.1 Задание (описание алгоритмов управления в виде таблицы истинности) 10 2.2 Разработка исходной структурной схемы системы автоматического управления 11 2.3 Составление аналитических выражений сигналов управления 11 2.4 Описание алгоритмов управления (таблица истинности) 12 2.5 Разработка структурной схемы системы автоматического управления 12 2.6 Разработка эскизов схем управляющих программ 13 1. Теоретическая часть 1.1 Описание дискретной системы автоматического управления Система автоматического управления состоит из объекта управления и комплекса технических средств автоматизации (рисунок 1). 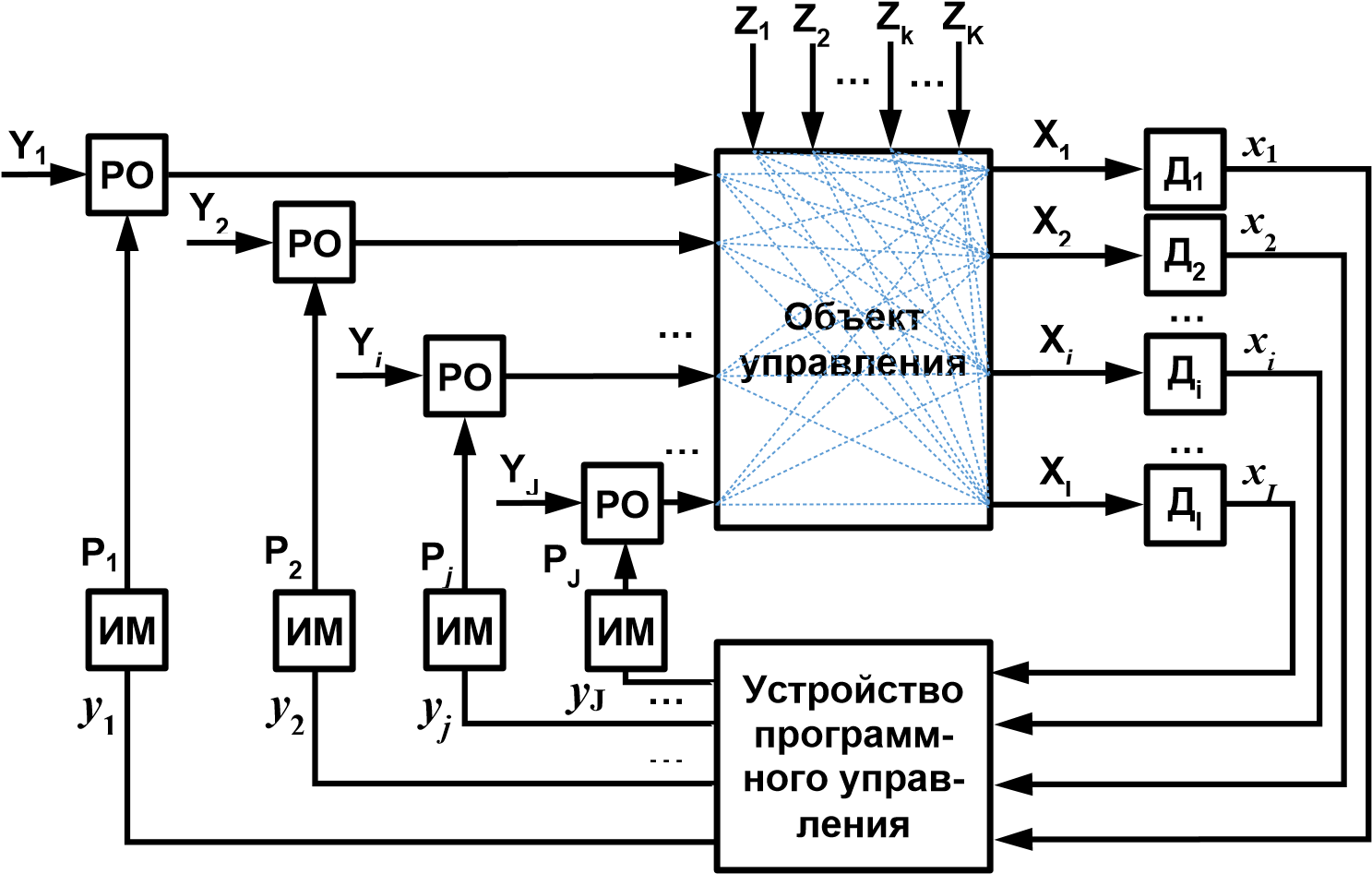 Рисунок 1.1 – Структурная схема системы автоматического управления Объект управления включает технологическое оборудование и реализуемый в нем технологический процесс. На объект управления воздействуют управляющие 𝑌𝐽 и возмущающие воздействия 𝑍𝐾, его состояние характеризуют управляемые величины 𝑋𝐼. Зависимости изменения управляемых величин от изменения управляющих воздействия образуют каналы управления. Сигнал контроля 𝑥𝐼 от датчиков поступает на устройство программного логического управления, которое по определенному алгоритму обрабатывает поступающую информацию от датчиков и формирует двузначные (логические) сигналы управления 𝑦𝐽. Эти сигналы управления поступают на исполнительные механизмы (ИМ), которые, создавая перестановочное усилие 𝑃𝐽, через механическую связь передают его на регулирующий орган (РО). Регулирующий орган изменяет управляющее воздействие 𝑌𝐽. Сигнализатор ДI контролирует управляемую величину в течение времени t и формирует двухзначный (логический) сигнал контроля x по пороговому (предельному) значению управляемой величины Xп (рисунок 2). 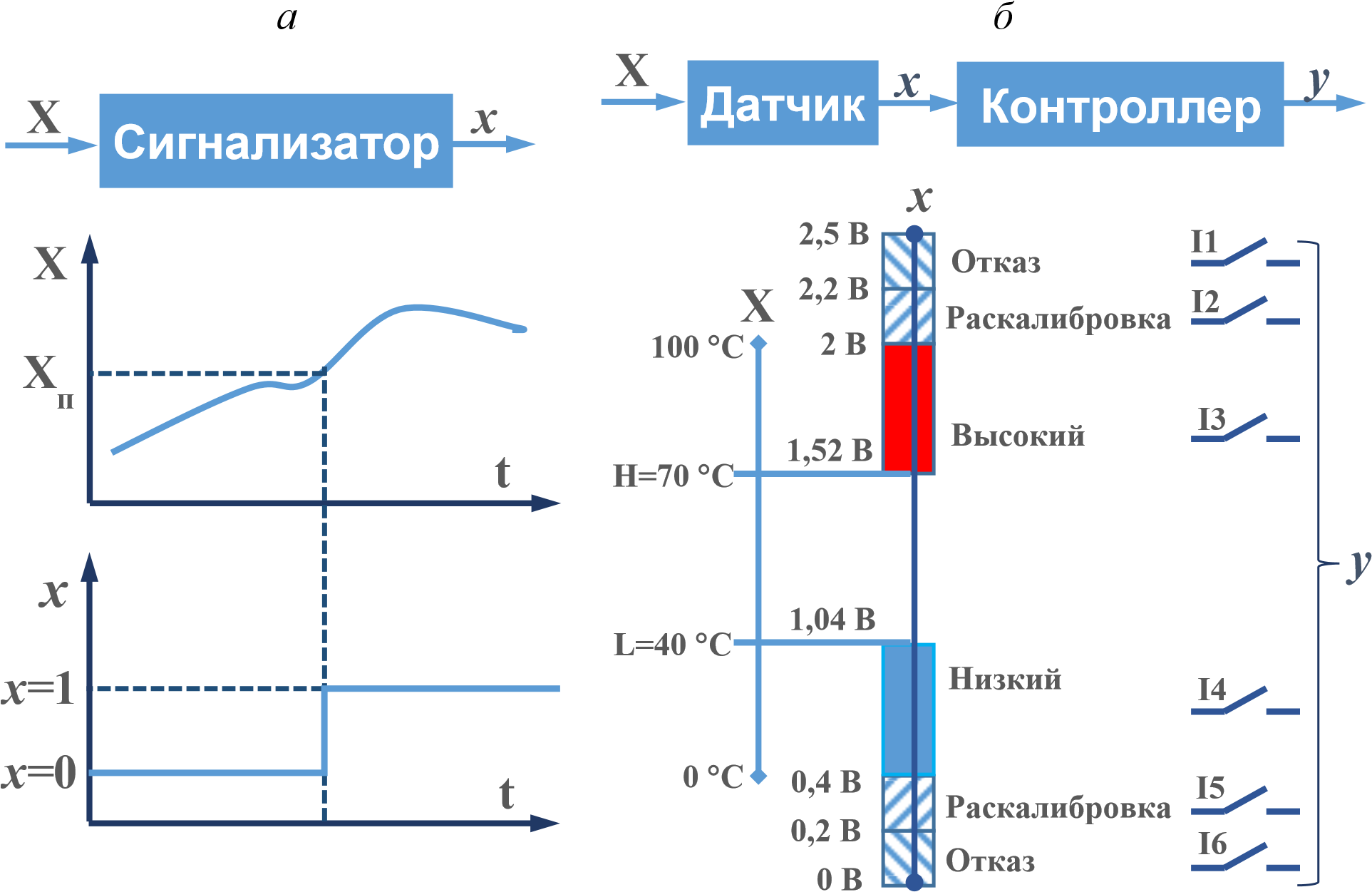 Рисунок 1.2 – Принципы формирования логических сигналов: а – формирование логических сигналов сигнализатором; б, в – формирование логических сигналов контроллером по аналоговому сигналу датчика Двухзначные (двоичные) переменные по значению аналогового сигнала датчика может формировать программа микропроцессора контроллера. Диапазон по напряжению сигнала датчика делится на интервалы. Нахождение значения аналогового сигнала в определенном интервале идентифицируется несколькими логическими переменными I1, I2, … I6. Эти переменные применяют в алгоритме формирования логического сигнала управления y. Упрощенные схемы формирования двухзначных сигналов контроля управления представлены на рисунке 3.  Рисунок 1.3 – Упрощенная схема формирования логических сигналов Сигнализаторы имеют выходные реле, которые срабатывают при достижении контролируемой величины X заданного на сигнализаторе предельного значения Xп. Для формирования дискретных (логических) сигналов контроля по напряжению x1 и по току x2 к контактам выходных реле соответственно подключаются источник напряжения E и источник тока I. Затем дискретные (логические) сигналы контроля по напряжению и по току поступают на соответствующие входы контроллера для дискретных сигналов по напряжению и токовых дискретных сигналов. Программа микропроцессора контроллера обрабатывает входные дискретных сигналы и по заданному в программе алгоритму формирует дискретные сигналы y1 и y2. Эти сигналы управляют выходными элементами контроллера (реле, оптроны, транзисторы). На рисунке 4 представлены примеры логических контроллеров. Параметры электрических внешних для устройства управления входных и выходных сигналов, это сигналы с дискретно изменяющимися амплитудой, длительностью, фазой или частотой. В частности, номинальные значения амплитуды сигналов напряжения могут быть из ряда: 24, 48, 60 и 110 В. Обобщенная структурная схема логического устройства управления приведена на рисунке 5. Например, для амплитуды сигнала 24 В и нагрузочном сопротивлении 20 кОм устанавливают уровни на входе и выходе согласно таблице 1. Таблица 1 - Параметры дискретных сигналов
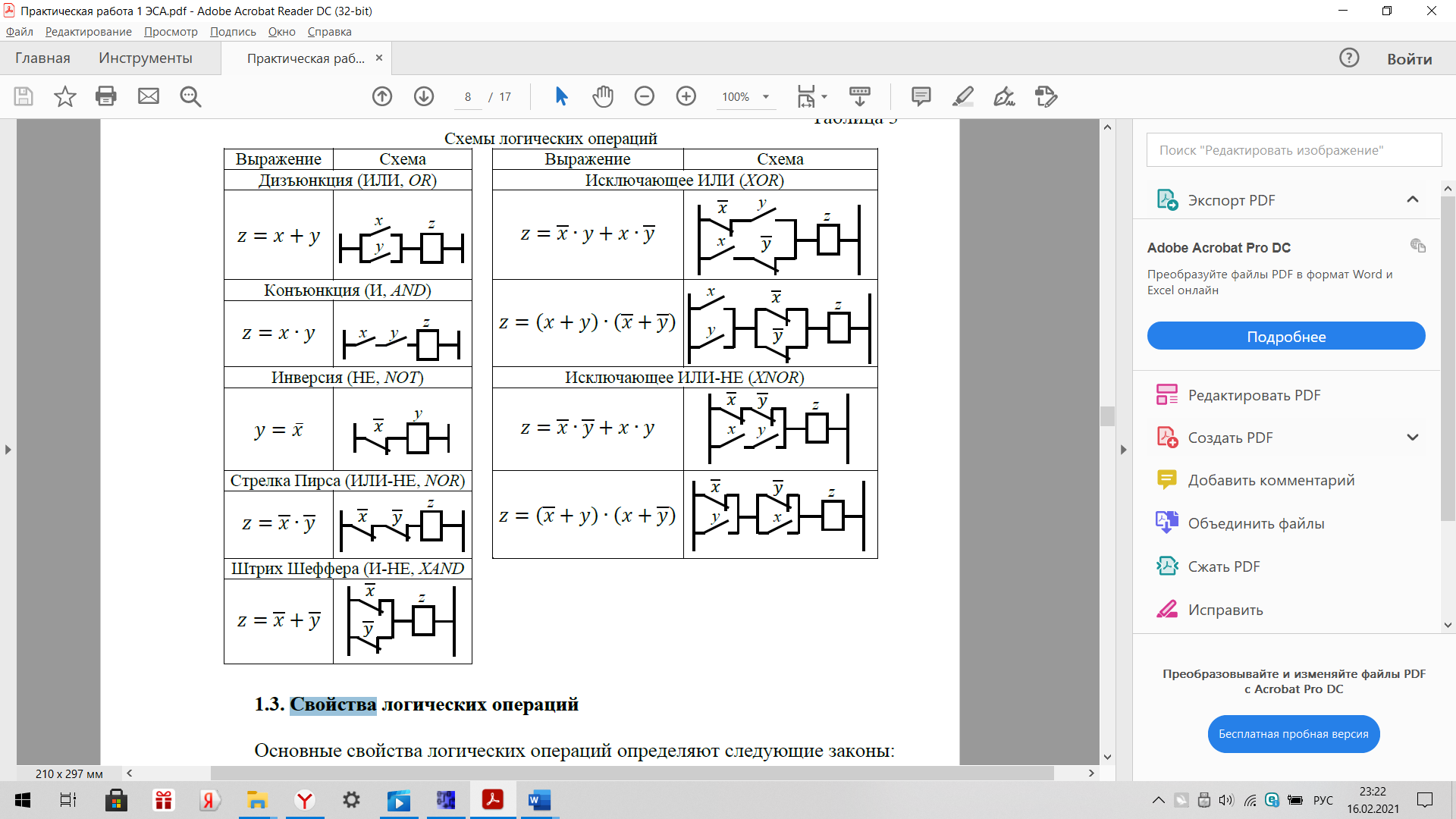
Ток утечки в пределах низкого уровня на выходе не должен превышать 0,1 мА. Уровни для других сигналов следует устанавливать в стандартах и (или) технических условиях на дискретные изделия конкретного вида. 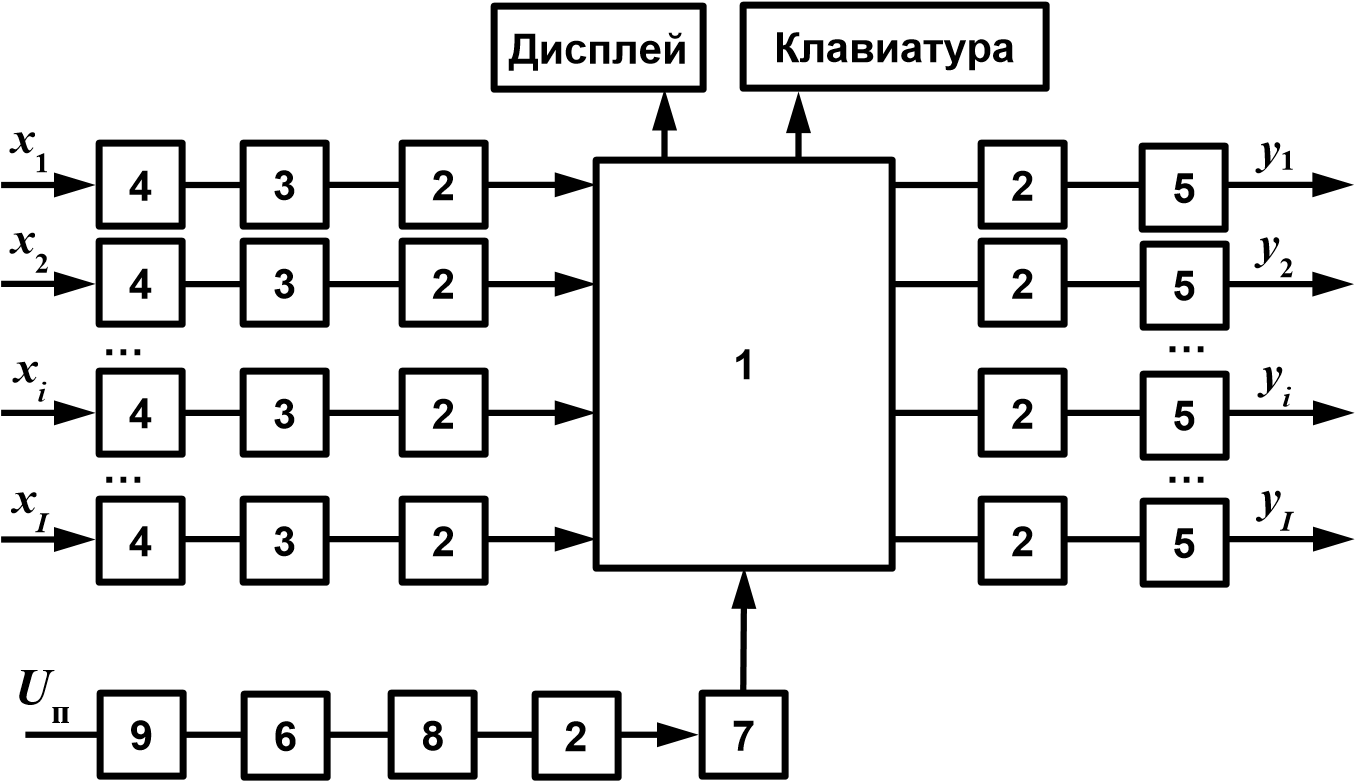 Рисунок 5 - Обобщенная структурная схема устройства логического управления: xi – сигналы контроля, yi – сигналы управления, 1- обработка логических сигналов, 2 – световая индикация уровня напряжения, 3 – аналоговый фильтр сигнальных цепей, 4 – защита (согласование) сигнальных цепей, 5 – исполнительные цепи (реле, оптроны и т.д.), 6 – защита цепей питания, 7 – аналоговый фильтр цепей питания, 8 – стабилизатор напряжения, 9 - кнопочный выключатель без самовозврата, с размыканием и возвратом элемента управления посредством вторичного нажатия кнопки Параметры электрических входных и выходных сигналов, с дискретно изменяющимися амплитудой, длительностью, фазой или частотой должны соответствовать ГОСТ 26.013. Перед обработкой сигналы с помощью схемотехнических решений могут быть уменьшены до параметров сигналов цифровых интегральных микросхем или микропроцессоров. 1.2. Основные логические операции Обработка дискретных сигналов в логических устройствах управления осуществляется применением методов дискретной математики. В алгебре логики рассматриваются переменные, которые могут принимать только два значения: 0 и 1. В этом разделе математики определенно несколько логических операций. Основные логические операции представлены в таблице 2. В этой таблице приведены стандартные условные графические обозначения (англ. American National Standards Institute (ANSI), англ. International Electrotechnical Commission (IEC)). Условные графические обозначения логических операций применяют для функциональных блоков графического языка программирования (англ. Function Block Diagram, FBD). Таблица 2 - Логические операции 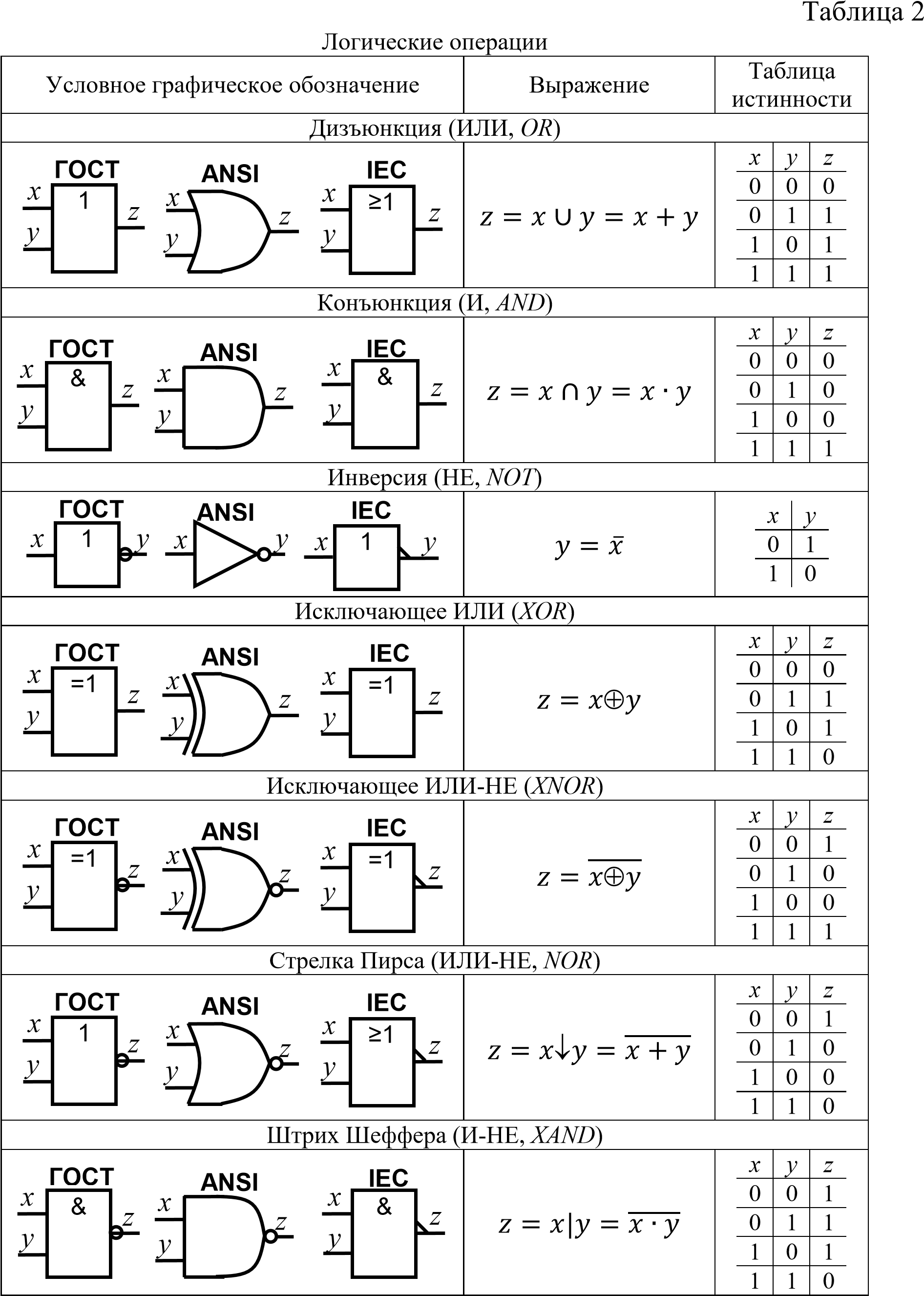 В некоторых случаях для программирования логических контроллеров применяют язык релейной логики (англ. Ladder Diagram, LD). В таблице 3 приведены схемные изображения логических операций. Входные величины обозначают с помощью нормально замкнутых и нормально разомкнутых контактов. Нормально разомкнутый контакт разомкнут, если переменная имеет значение ложь (0) и замкнут, если переменная имеет значение истина (1). Нормально замкнутый контакт замкнут, если переменная имеет значений ложь, и разомкнут, если имеет значение истина. Выходная величина обозначается в виде катушки реле. Таблица 3 Схемы логических операций
1.3 Свойства логических операций Основные свойства логических операций определяют следующие законы: Идемпотентность: 𝑥 ∪ 𝑥 = 𝑥, 𝑥 ∩ 𝑥 = 𝑥; Коммутативность: 𝑥 ∪ 𝑦 = 𝑦 ∪ 𝑥, 𝑥 ∩ 𝑦 = 𝑦 ∩ 𝑥; Ассоциативность: 𝑥 ∪ (𝑦 ∪ 𝑧) = (𝑥 ∪ 𝑦) ∪ 𝑧, 𝑥 ∩ (𝑦 ∩ 𝑧) = (𝑥 ∩ 𝑦) ∩ 𝑧; Дистрибутивность: (𝑥 ∪ 𝑦) ∩ 𝑧 = (𝑥 ∩ 𝑧) ∪ (𝑦 ∩ 𝑧), (𝑥 ∩ 𝑦) ∪ 𝑧 = (𝑥 ∪ 𝑧) ∩ (𝑦 ∪ 𝑧); Правила де Моргана: 𝑥̅ ∪ 𝑦̅ =  , 𝑥̅ ∩ 𝑦̅ = , 𝑥̅ ∩ 𝑦̅ = ; ; Действие с логическими константами 0 и 1: 𝑥 ∪ 0 = 𝑥, 𝑥 ∩ 0 = 0, 𝑥 ∪ 1 = 1,  𝑥 ∩ 1 = 𝑥, 𝑥 ∩ 𝑥 = 0; Поглощение: 𝑥 ∪ (𝑥 ∩ 𝑦) = 𝑥, 𝑥 ∩ (𝑥 ∪ 𝑦) = 𝑥; 𝑥 ∪ (𝑥 ∩ 𝑦) = 𝑥 ∪ 𝑦, 𝑥 ∩ 1 = 𝑥, 𝑥 ∩ 𝑥 = 0; Поглощение: 𝑥 ∪ (𝑥 ∩ 𝑦) = 𝑥, 𝑥 ∩ (𝑥 ∪ 𝑦) = 𝑥; 𝑥 ∪ (𝑥 ∩ 𝑦) = 𝑥 ∪ 𝑦, Исключение: Двойное отрицание: Закон исключения третьего: 𝑥 ∪ 𝑥 = 1. Рассмотрим пример минимизации логической функции, используя свойства идемпотентности, коммутативности, ассоциативности, дистрибутивности, исключения третьего: 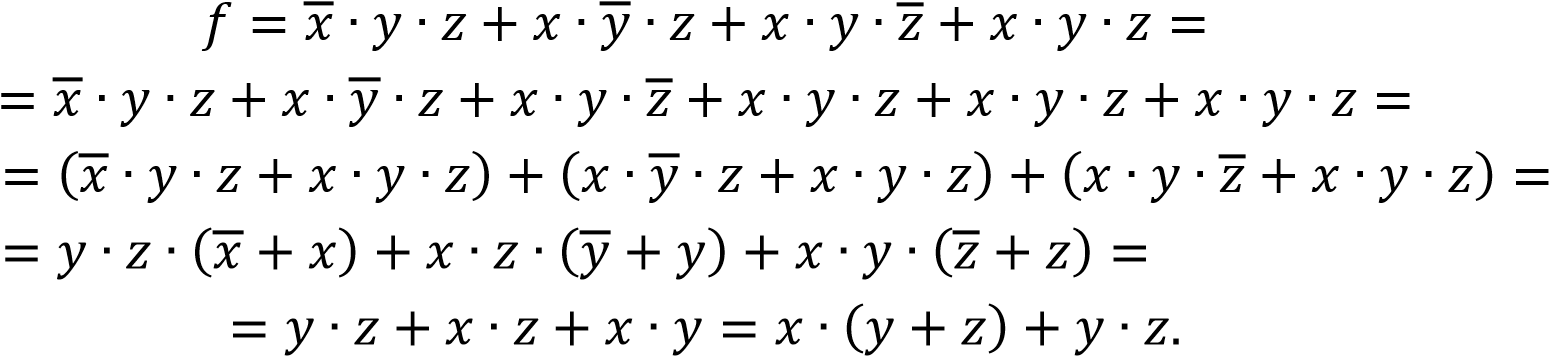 а б  Рисунок 6 – Варианты реализации алгоритма На основе аналитического выражения можно построить для программирования ПЛК логическую схему (рис. 6, а) и схему на языке релейных диаграмм (рис. 6, б). 1.4 Основные формы логических выражений Логические выражения могут быть представлены в двух формах. Совершенная дизъюнктивная нормальная форма (СДНФ) – это дизъюнкция элементарных конъюнкций: 𝑦 = 𝑓(𝑥1, 𝑥2, … , 𝑥𝑛, … , 𝑥𝑁) = (𝑥̃1∙𝑥̃2∙ … ∙𝑥̃𝑛∙ … ∙𝑥̃𝑁)1+(𝑥̃1∙𝑥̃2∙ … ∙𝑥̃𝑛∙ … ∙𝑥̃𝑁)2+… …+(𝑥̃1∙𝑥̃2∙… ∙𝑥̃𝑛∙ … ∙𝑥̃𝑁)m +…+ (𝑥̃1∙𝑥̃2∙…∙𝑥̃𝑛∙…∙𝑥̃𝑁)𝑀 = ⋃𝑀𝑚=1 ⋂𝑁𝑛=1 𝑥̃𝑛 где N – количество аргументов в конъюнкте; M – количество конъюнктов при y=1. Если один конъюнктов равен 1, то всё выражение равно 1. В СДНФ нет двух одинаковых элементарных конъюнктов, в каждом конъюнкте нет одинаковых аргументов, ни один конъюнкт не содержит одновременно некоторый аргумент и его отрицание. Совершенная конъюнктивная нормальная форма (СКНФ) – это конъюнкция элементарных дизъюнкций: ∙  где M – количество дизъюнктов при y=0. Если один дизъюнктов равен 0, то всё выражение равно 0. В СКНФ нет двух одинаковых элементарных дизъюнктов, в каждом дизъюнкте нет одинаковых аргументов, ни один дизъюнкт не содержит одновременно некоторый аргумент и его отрицание. 2. Практическая часть 2.1 Задание (описание алгоритмов управления в виде таблицы истинности) Необходимо разработать логические схема для выполнения алгоритмов описанных в таблице 2.1 Таблица 2.1 – Описание алгоритмов управления дискретных датчиков
2.2 Разработка исходной структурной схемы системы автоматического управления 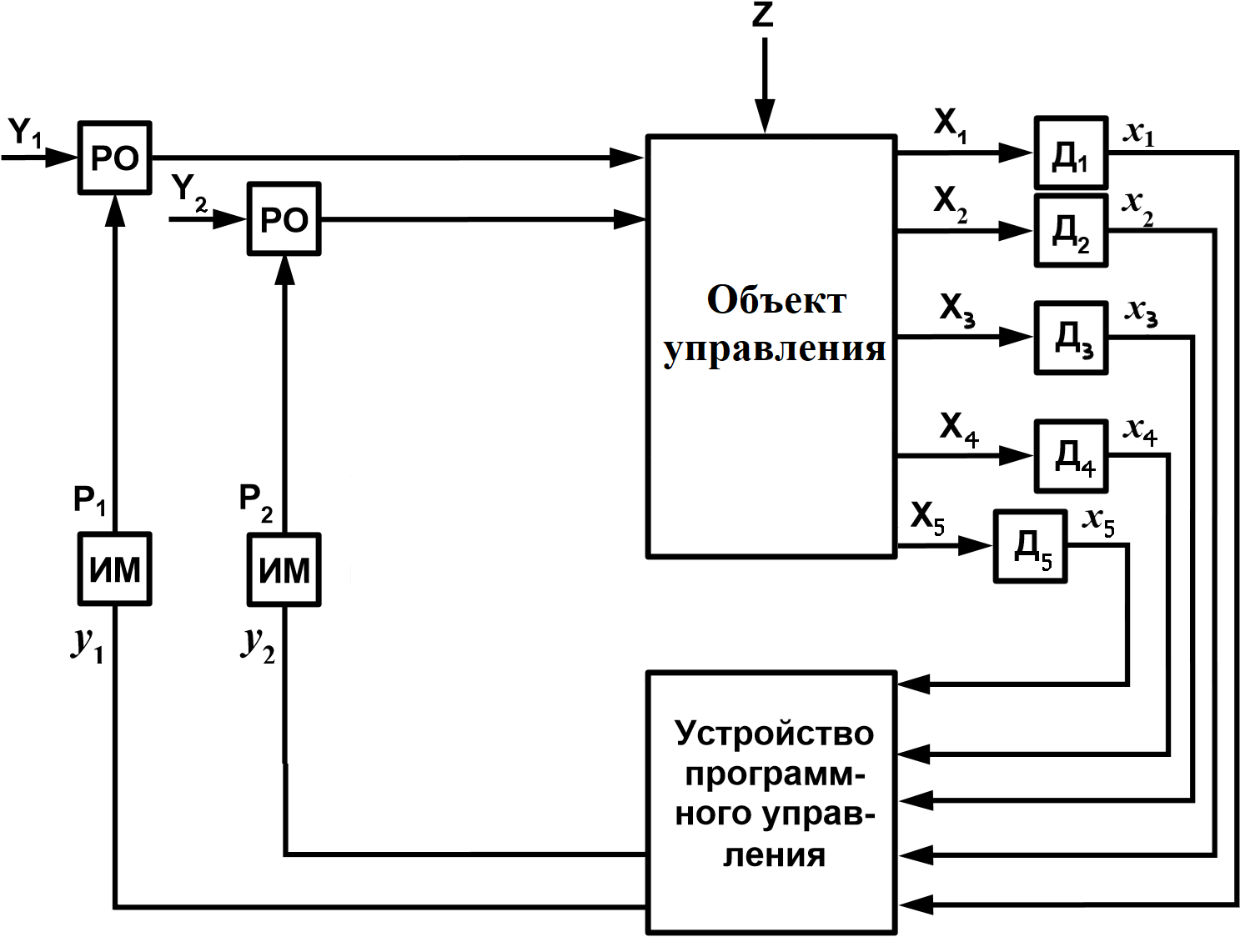 Рисунок 2.1 – Структурная схема управления автоматического управления:  – возмущающие воздействие, 𝑌𝐽 – управляющие воздействия, 𝑋𝐼 – управляемые величины, – возмущающие воздействие, 𝑌𝐽 – управляющие воздействия, 𝑋𝐼 – управляемые величины,  – сигналы контроля, – сигналы контроля,  – двузначные (логические) сигналы управления, 𝑃𝐽 – перестановочные усилия исполнительных механизмов, ДI –сигнализаторы, Xп – управляемые величины, РО – регулирующий орган, ИМ – исполнительный механизм – двузначные (логические) сигналы управления, 𝑃𝐽 – перестановочные усилия исполнительных механизмов, ДI –сигнализаторы, Xп – управляемые величины, РО – регулирующий орган, ИМ – исполнительный механизм2.3 Составление аналитических выражений сигналов управления       2.4 Описание алгоритмов управления (таблица истинности) Таблица 2.4 – Таблица истинности
2.5 Разработка структурной схемы системы автоматического управления  Рисунок 2.2 – Структурная схема управления автоматического управления 𝑍𝐾 – возмущающие воздействие, 𝑌𝐽 – управляющие воздействия, 𝑋𝐼 – управляемые величины, 𝑥𝐼 – сигналы контроля, 𝑦𝐽 – двузначные (логические) сигналы управления, 𝑃𝐽 – перестановочные усилия исполнительных механизмов, ДI –сигнализаторы, Xп – управляемые величиныx, РО – регулирующий орган, ИМ – исполнительный механизм 2.6 Разработка эскизов схем управляющих программ
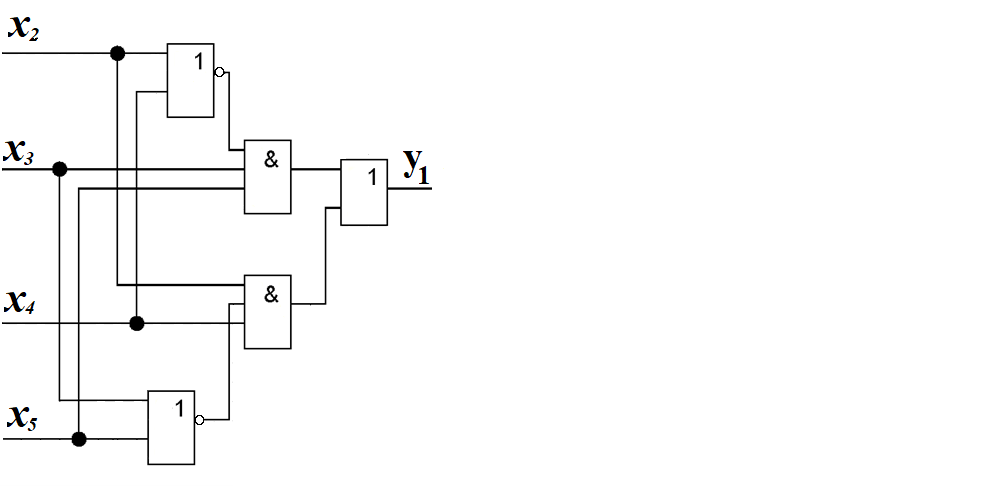
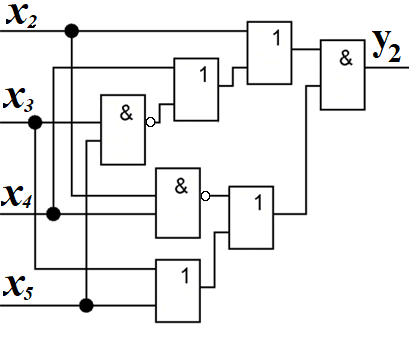
Рисунок 2.3 – Функциональная и релейно-контактная схема управляющей программы для сигнала 
Рисунок 2.4 – Функциональная и релейно-контактная схема управляющей программы для сигнала  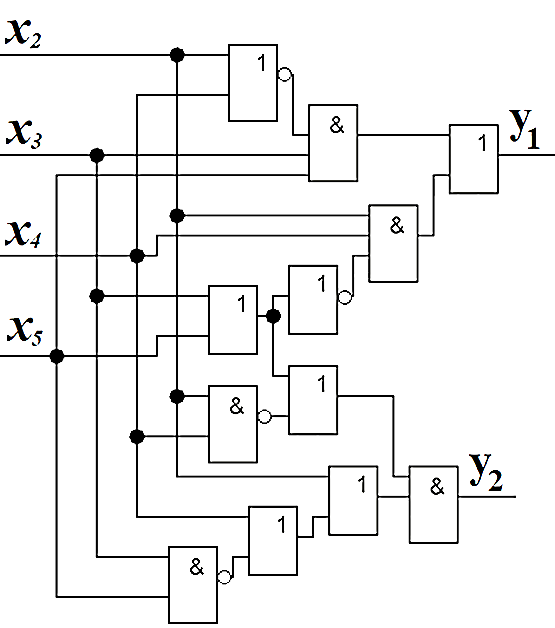 Рисунок 2.5 – Функциональная схема управляющей программы для сигнала   Рисунок 2.6 – Релейно-контактная схема управляющей программы для сигнала | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 𝑧 = (𝑥 + 𝑦) ∙ (𝑥 + 𝑦)
𝑧 = (𝑥 + 𝑦) ∙ (𝑥 + 𝑦) 

 + 𝑦) ∙ (𝑥 +
+ 𝑦) ∙ (𝑥 +  )
)