Практическая работа - гироскоп. Практическая работа гироскоп. Практическая работа Создай программный код, при исполнении которого робот будет поворачиваться на 90 от исходного положения
 Скачать 5.04 Mb. Скачать 5.04 Mb.
|

|
Практическая работа Создай программный код, при исполнении которого робот будет поворачиваться на 90° от исходного положения. Для этого при составлении программы нужно выполнить следующие шаги и использовать соответствующие блоки: 1. На рабочем столе запустите программу LEGO MINDSTORMS Education EV3 нажав на значок 2. После запуска программы нажмите меню Файл: 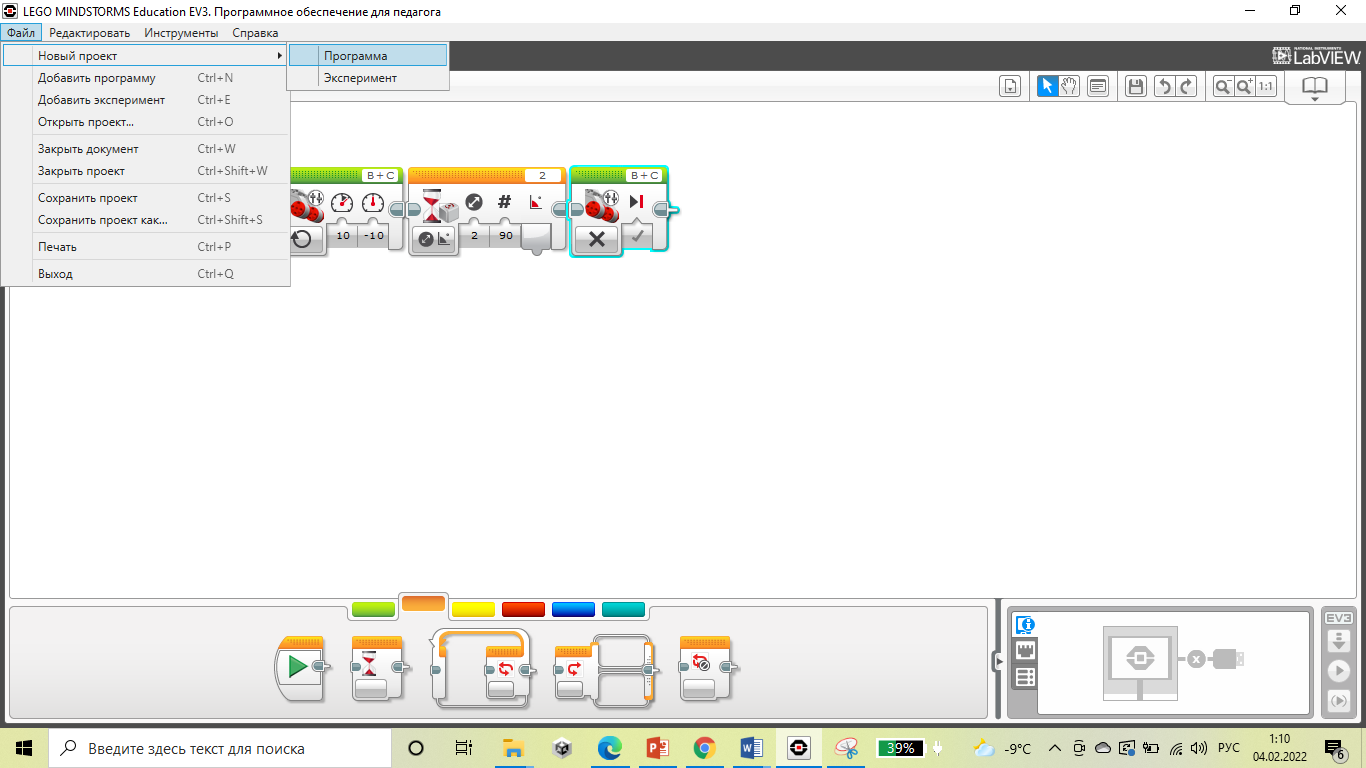 3. Выберите блок – Начало из закладки «Управление оператором» 4. Выбери блок Независимого управления мотором для создания движения робота во вкладке «Действие». Введи параметры гироскопического датчика в блоке Ожидание Когда угол поворота робота достигает 90°, отключается мотор в блоке Независимое управление мотором. Сохраните программу -> Меню Файл -> Сохранить проект Практическая работа Создай программный код, при исполнении которого робот будет поворачиваться на 90° от исходного положения. Для этого при составлении программы нужно выполнить следующие шаги и использовать соответствующие блоки: 1. На рабочем столе запустите программу LEGO MINDSTORMS Education EV3 нажав на значок 2. После запуска программы нажмите меню Файл: 3. Выберите блок – Начало из закладки «Управление оператором» 4. Выбери блок Независимого управления мотором для создания движения робота во вкладке «Действие». Введи параметры гироскопического датчика в блоке Ожидание Когда угол поворота робота достигает 90°, отключается мотор в блоке Независимое управление мотором. Сохраните программу -> Меню Файл -> Сохранить проект            |