курсовая. Предусмотреть 5 5 1 структурная схема системы управления 6
 Скачать 1.85 Mb. Скачать 1.85 Mb.
|

2.3 Основные технические параметры АЦПСтатические параметры АЦП приведены на рисунке 1.5. Возникновение динамических погрешностей связано с дискретизацией сигналов, изменяющихся во времени. Можно выделить следующие параметры АЦП, определяющие его динамическую точность (рисунок 1.6). В идеале повторяющиеся преобразования фиксированного постоянного входного сигнала должны давать один и тот же выходной код. Но присутсвие неизбежного шума в схемах АЦП создает некоторый диапазон выходных кодов для заданного входного напряжения. Для характеристики шума применяется термин «эффективная разрешающая способность», или эффективная разрядность (ENOB). Как правило, ENOB применяется для обозначения динамической эффективности высокоскоростных АЦП при преобразовании ими сигналов переменного тока и гораздо реже в отношении низкочастотных сигма-дельта АЦП. 14 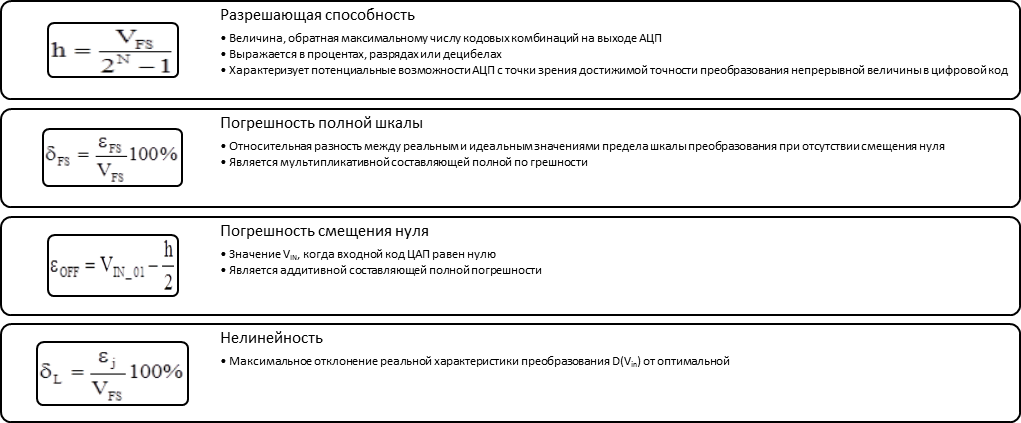 Рисунок 1.5 – Статические параметры АЦП. Рисунок 1.5 – Статические параметры АЦП.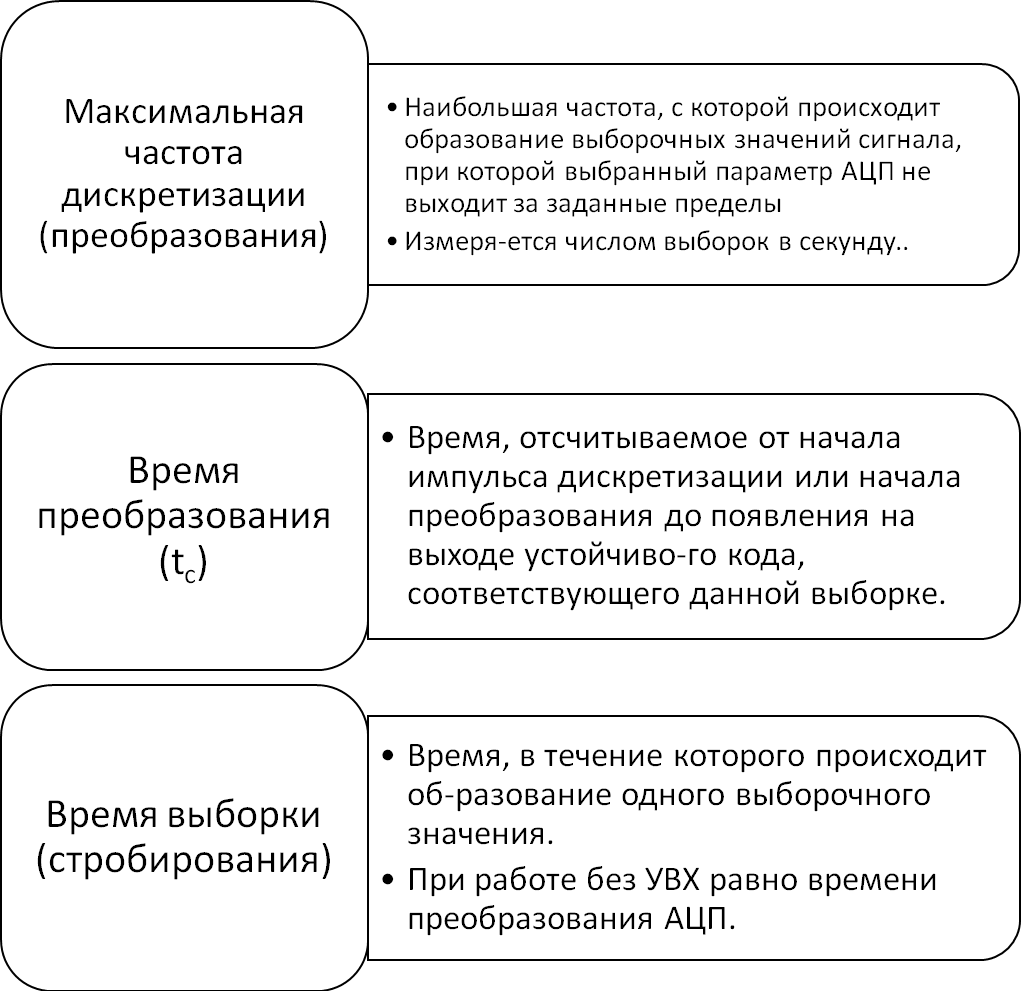 Рисунок 1.6 – Динамические параметры АЦП. ENOB log2 ( VFS ) VN бит, (1.1) где: VFS входное напряжение полной шкалы АЦП; VN среднеквадратическое отклонение шума. Эффективная разрешающая способность АЦП высокой разрядности может быть много ниже номинальной. Рассмотренные параметры АЦП являются наиболее используемыми и до- статочно полно характеризуют АЦП при работе с относительно медленно изменяющимися сигналами (как в случае высокоточных измерениях веса). 3 ОБЩАЯ ХАРАКТЕРИСТИКА МОДУЛЕЙ СЕМЕЙСТВА ADAM-4000Модули серии ADAM-4000 разработаны для создания распределенных систем сбора данных и управления и являются компактными и интеллектуальными устройствами обработки сигналов датчиков, специально разработанными для применения в промышленности. Присутствие встроенных микропроцессоров дает возможность модулям осуществлять нормализацию сигналов, операции аналогового и дискретного ввода-вывода, отображение данных и их передачу (или прием) по интерфейсу RS-485. Все модули обладают гальванической развязкой по цепям питания и интерфейса RS-485, программной установкой параметров, командным протоколом ASCII и сторожевым таймером. Структура системы сбора данных на модулях ADAM-4000 приведена на рисунке 1.7. 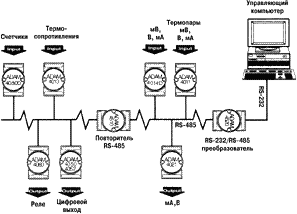 Рисунок 1.7 Структура системы сбора данных на модулях ADAM-4000. Контроллеры и модули данной серии используются для построения рас- пределенных систем сбора данных и управления. Встроенные микропроцессоры позволяют осуществлять нормализацию сигналов, операции аналогового и дискретного ввода-вывода, отображение данных и их передачу (или прием) по интерфейсу RS-485. Все модули имеют гальваническую развязку по цепям питания и интерфейса RS-485, программную установку параметров, командный протокол ASCII и сторожевой таймер. |