Программа дисциплины Автоматизация производственных процессов в машиностроении
 Скачать 0.53 Mb. Скачать 0.53 Mb.
|

1 2 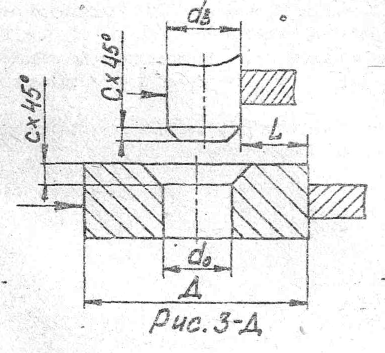 Таблица 4.1
4.3 Методические указания Контрольная работа предусматривает решение задач по базовым разделам дисциплины. Номер варианта задания выбирается из таблицы 4.1 по двум последним цифрам номера зачетной книжки. Контрольная работа должна включать титульный лист, задание (условия 3-х задач), содержание, основную часть, список используемой литературы. Основная часть должна включать: теоретические положения, относящиеся к решаемой задаче, результаты расчетов и выводы. В работе необходимо представить расчетные схемы и эскизы, рассчитываемых устройств. Работа оформляется на листах белой бумаги формата А4. 5 Основная и дополнительная литература Основная 1 Волчкевич Л.И. Автоматизация производственных процессов: Учебное пособие. – 2-е изд. – М.: Машиностроение, 2007. – 380 с. 2 Шишмарев В.Ю. Автоматизация производственных процессов в машиностроении. Учеб. для студ. ВУЗов. М.: ИЦ «Академия», 2007 г. – 365 с. 3 Капустин Н.М. Автоматизация машиностроения. Учеб. для ВУЗов. М.: Высш. шк., 2003 г. – 222 с. 4 Дудкин Е.В., Яковлев А.А. Автоматизация производственных процессов в машиностроении. – Ч1. Автоматизация ориентирования, загрузки и транспортирования изделий: Учеб. пособие / ВолгГТУ, Волгоград, 2004. – 89 с. 5 Дудкин Е.В., Рабинович Л.А., Яковлев А.А. Автоматизация производственных процессов в машиностроении. – Ч4. Автоматизация сборочных операций: Учеб. пособие / ВолгГТУ, Волгоград, 2003. – 76 с. Дополнительная 6 Схиртладзе А.Г. Автоматизация производственных процессов в машиностроении. Старый Оскол: ООО «ТНТ», 2008г. – 146 с. 7 Автоматизация, робототехника и гибкие производственные системы кузнечно-штамповочного производства. Учебник / К.И. Васильев, А.М. Смирнов, Е.И. Сосёнушкин, А.Г. Схиртладзе. – Изд. 2-е, перераб. и доп. – Старый Оскол: ООО «ТНТ», 2008г. – 484 с. 8 Технологические основы гибких производственных систем. Под ред. Ю.М. Соломенцева. Изд. 2-е, исправленное. М.: Высш. шк., 2000г. – 255 с. 9 Автоматическая загрузка технологических машин: Справочник/ Под ред. И.А. Клусова. – М.: Машиностроение, 1990. – 400 с. 10 Рабинович А.Н. Автоматизация механосборочного производства. – Киев: Вища школа, 1969. – 542 с. Перечень методических указаний 1 Отладка и исследование вибробункера с эллиптической траекторией движения рабочего органа: метод. указания / Сост. Кристаль М.Г., Маловечко А.К. – Волгоград, ВолГТУ. – 1994 г. – 18 с. 2 Определение производительности и оптимальных параметров бункерных загрузочных устройств с центральной вращающейся трубкой: метод. указания / Сост. Фрезинский Л.Л., Дудкин Е.В., Волгоград, ВолГПИ. 1992 г. – 12 с. 6 Вопросы к экзамену по дисциплине «Автоматизация производственных процессов в машиностроении» 1 Определить минимальный размер фаски на сопрягаемых деталях при автоматической сборке. 2 Базирование деталей (плоских и тел вращения). 3 Конструирование роликовых лотков. Определить оптимальный угол наклона лотка. 4 Трубчатые БОУ. Выбрать конструктивные параметры бункера и определить число двойных ходов элементов трубки. 5 Вибрационные загрузочно-ориентирующие устройства. Определить ускорение лотка Sкр верх. 6 Карманчиковые БОУ. Рассчитать скорость вращения диска при радиальном расположении деталей для режима быстрого перемещения детали. 7 Карманчиковые БОУ. Рассчитать скорость вращения диска при радиальном расположении деталей. 8 Классификация бункерных ориентирующих устройств. Карманчиковые БОУ. Определить скорость вращения диска при расположении деталей по хорде. 9 Карманчиковые БОУ. Определить скорость вращения диска при расположении деталей перпендикулярно торцу. 10 Определить размеры В и L поперечного сечения приемного лотка для карманчикового бункерного ориентирующего устройства. 11 Трубчатые БОУ. Определить оптимальную величину угла приемной части трубки. 12 Вибрационные загрузочно-ориентирующие устройства. Определить ускорение детали S и производительность лотка. 13 Вибрационные загрузочно-ориентирующие устройства. Определить критическое ускорение лотка Sкрниж. 14 Трубчатые БОУ. Определить диаметр трубки для бункера с возвратно-поступательным движением элементов трубки. 15 Определить размер диаметра приемной трубки для бункера с вращательным движением трубки. 16 Определить частоту вращения диска для БОУ с радиальными пазами на диске периодического движения, с приводом от мальтийского механизма. 17 Определить условие свободного сопряжения вала со втулкой при автоматической сборке. 18 Конструирование лотков-скатов. Определить ширину лотка при транспортировании деталей с цапфами. 19 Определить расстояние между упорами при одностороннем расположении во время автоматической сборки валика со втулкой. 20 Определить расстояние между упорами при их встречном расположении во время автоматической сборки валика со втулкой. 21 Конструирование лотков-склизов. Определить конечную скорость движения деталей по лотку. 22 Определить условие напряженного сопряжения вала со втулкой при автоматической сборке. 23 Виды автоматического контроля и его роль в повышении качества продукции. Определение контрольного автоматического устройства. 24 Элементы контрольных автоматов, их рабочие функции и требования к их работе. 25 Классификация измерительных органов контрольных автоматов по способу преобразования измерительного импульса и область их применения. 26 Механические органы контрольных автоматов. Контрольные автоматы с жесткими и клиновыми калибрами. 27 Разновидности индуктивных преобразователей контрольных автоматов. Дроссельные преобразователи, их недостатки. 28 Дифференциальные индуктивные преобразователи и их преимущества. Схемы включения. 29 Емкостные преобразователи контрольных автоматов. Последовательность расчета. Схемы включения емкостных преобразователей. 30 Разновидности фотоэлектрических преобразователей контрольных автоматов. Принцип работы 2-х предельного преобразователя и схемы формирования измерительного сигнала. 31 Пневматические измерительные преобразователи. Принцип работы дроссельных преобразователей. 1 2 |