реферат Глушков. Программируемый логический контроллер сокращенно
 Скачать 498.1 Kb. Скачать 498.1 Kb.
|

|
Введение Программируемый логический контроллер (сокращенно ПЛК; английское сокращение PLC; на русский более точно — контроллер с программируемой логикой), программируемый контроллер — специальная разновидность электронной вычислительной машины. ПЛК чаще всего используют для автоматизации технологических процессов. Длительное автономное использование ПЛК выступает в качестве основного режима его работы, часто без серьёзного обслуживания и практически без вмешательства человека в неблагоприятных условиях окружающей среды. На ПЛК иногда строятся системы программного числового управления станков. ПЛК — это устройства, которые предназначены для работы в реальном времени. ПЛК имеют ряд особенностей, который отличает их от других электронных приборов, которые применяются в промышленности: в отличие от микросхемы, предназначенной для управления электронными устройствами — микроконтроллер (однокристального компьютера) — ПЛК - это самостоятельное устройство, а не отдельная микросхема; ПЛК ориентированы на работу с машинами через развитый ввод сигналов датчиков и через вывод сигналов на механизмы-исполнители, в отличие от компьютеров, которые ориентированы на управление оператором и принятие решений; ПЛК в отличие от встраиваемых систем изготавливаются как самостоятельные изделия, отделенные от управляемого при его помощи оборудования. В системах управления технологическими объектами логические команды, как правило, преобладают над арифметическими операциями, над числами с плавающей точкой, что позволяет при сравнительной простоте микроконтроллера (шины шириной 8 или 16 разрядов), получить мощные системы, которые действуют в реальном времени. Числовые операции в современных ПЛК в их языках программирования реализуются наравне с логическими. В отличие от большего количества высокоуровневых языков программирования современных компьютеров, все языки программирования ПЛК имеют простой доступ к манипулированию битами в машинных словах. 1 Виды ПЛК ПЛК основные: Программируемое (интеллектуальное) реле; Программные ПЛК на базе IBM PC-совместимых компьютеров; На базе простейших микропроцессоров ПЛК; ЭСУД контроллер (Электронная система управления двигателем). Существенно развивается в последнее время именно это направление, и обусловлено это развитие определенными причинами. Такими причинами являются: Рост надежности ПК; Наличие различных модификаций ПК в промышленном и обычном исполнении; Использование открытой архитектуры; Возможность подключения любых модулей УСО, выпускающихся разными компаниями; Возможное использование широкой номенклатуры наработанного ПО. Для управления небольшими замкнутыми объектами в промышленности, в специальных системах автоматизации в медицине и других направлениях - именно для всего этого используются контроллеры. Также контроллер выполняет многие функции, которые предусматривают очень сложную обработку всей измерительной информации с расчетом нескольких управляющих воздействий, при этом общее количество входов/выходов не превосходит нескольких десятков. Основные достоинства этих контроллеров - это значительный объем вычислений за относительно малый отрезок времени. Схожи с условиями работы офисных ПК, возможно программирование их на языке высокого уровня. Аппаратная поддержка создается обычными контроллерами, которые обладают функциями глубокой диагностикой и устранением неисправностей без остановки работы контроллера. 1.2 Локальный программируемый контроллер Классификация ЛПК: Встраиваемый в оборудование и являющийся его неотъемлемой частью; Автономный, реализующий функции контроля и управления. У этих контроллеров есть средняя вычислительная способность - мощность. Это комплексная характеристика, которая зависит от разрядности и частоты компьютера и объема оперативной памяти. У локальных контроллеров есть несколько физических портов для того чтобы реализовать передачу информации с разными системами автоматизации. Типовые функции обработки измерительной информации, блокировок, регулирования и программного логического управления реализуются в этих контроллерах. Они отличаются высокой надежностью, живучестью и быстродействием именно поэтому в системах противоаварийной защиты используется специальный тип локальных контроллеров. Они также предусматривают полную диагностику неисправностей с локализацией их и резервирования компонентов и устройства в целом. 2 Входы и выходы Каждый контроллер имеет три типа входов — дискретный, аналоговый, специальный. 2.1 Дискретный вход Один вход может принимать только один сигнал, и он будет двоичным. Вход может быть включен или отключен. Один вход — 1 бит. К этому входу подключено соответствующее оборудование. Если состояние устройств невозможно описать 1 битом, то для работы такого оборудования используется несколько дискретных входов. Системное программное обеспечение должно поставляться с драйвером. Подсчитывает физическое значение каждого входа RAM. Таким образом, разработчикам не нужно понимать, как контроллер работает внутри. Дискретный вход — биты, которые можно читать и изменять из ОЗУ устройства. 2.2 Аналоговый вход Аналоговый электрический сигнал — это уровень напряжения или тока, соответствующий определенным физическим величинам. Это может быть значение температуры, давления, веса, положения, скорости движения, скорости. Поскольку ПЛК — это в первую очередь вычислительное устройство, аналоговый сигнал преобразуется в цифровой. Оказывается, это дискретная переменная. 2.3 Специальный вход Обыкновенные входы способны удовлетворить практически любую потребность. Необходимость в специальных входах возникает, когда возникают трудности с обработкой сигналов. Автоматы оснащены специализированными входами, позволяющими измерять длительность, фиксировать фронты, подсчитывать импульсы. Например, для определения положения валов используются датчики, которые могут генерировать импульсы на оборот. Частота может быть очень высокой. Даже на мощных процессорах процесс занимает много времени. В таких ситуациях необходимы спец. входы с возможностью первичной обработки информации. Второй тип таких входов — это входы, которые могут мгновенно запускать команды пользователей с прерываниями на выполнения основного ПО. 2.4 Дискретный выход К одному выходу можно подключить только один сигнал. Для загрузки выходов могут использоваться различные исполнительные механизмы. 3 Структуры систем управления Структуры систем управления: Централизованная: в корзину ПЛК, зачастую в объединительную панель, устанавливаются модули процессора(ов), ввода-вывода и связи. Если необходимо расширить систему за пределы существующей корзины, в нее устанавливаются модули расширения, добавляя возможность масштабирования в пределах одного шкафа. Датчики и исполнительные механизмы подключаются отдельными проводами непосредственно к модулям ввода-вывода, используя модули согласования с входами / выходами сигнальных модулей, или (в случае организации интерфейса с шиной в устройстве) через коммуникационный модуль (мост); В случае использования полевой шины типа AS-i возможно питание привода через шину с одновременной передачей управляющих сигналов; Распределенная: удалённые от шкафа с ПЛК датчики и исполнительные устройства связаны с ПЛК посредством каналов связи (через модули или процессоры связи) и, возможно, корзин-расширителей с использованием связей типа «ведущий-ведомый» (англ. Master-Slave). Интерфейсы ПЛК: RS-232 — проводной дуплексный интерфейс. Информация передаётся по проводам двоичным сигналом с двумя уровнями напряжения. Логическому «0» соответствует положительное напряжение, а логической «1» — отрицательное. Для электрического согласования линий RS-232 и стандартной цифровой логики UART выпускается большая номенклатура микросхем драйверов; RS-485 - В стандарте RS-485 для передачи и приёма данных используется одна витая пара проводов, иногда сопровождаемая экранирующей оплеткой или общим проводом. Передача данных осуществляется с помощью дифференциальных сигналов. Разница напряжений между проводниками одной полярности означает логическую единицу, разница другой полярности — ноль; Modbus — коммуникационный протокол, основан на архитектуре ведущий-ведомый. Использует для передачи данных интерфейсы RS-485, RS-422, RS-232, а также Ethernet сети TCP/IP. Сообщение Modbus RTU состоит из адреса устройства SlaveID, кода функции, специальных данных в зависимости от кода функции и CRC контрольной суммы; CC-Link — это группа открытых промышленных сетей, которые позволяют взаимодействовать устройствам многих производителей. Они используются в широком спектре приложений промышленной автоматизации на уровне машин, ячеек и линий; Profibus — открытая промышленная сеть, прототип которой был разработан компанией Siemens AG для своих промышленных контроллеров Simatic. На основе этого прототипа Организация пользователей Profibus разработала международные стандарты, принятые затем некоторыми национальными комитетами по стандартизации; DeviceNet; ControlNet; CAN; AS-Interface; Industrial Ethernet. Устройства устанавливаются на нижних звеньях АСУ ТП. ПЛК - это первый шаг в построении АСУ. Автоматизация обеспечивает очень экономический рост, значительно улучшая качество производства, позволяя избежать чрезмерно тяжелой, рутинной работы. 6 Назначение переменных в ПЛК Как и в любом языке программирования, переменная представляет собой именованную или иным образом адресуемую область памяти, адрес которой может использоваться для доступа к данным. Переменные также позволяют изменять данные, с которыми работает программа, различными способами. Он может обрабатывать сигналы и отвечать на них с помощью переменных ПЛК. Алгоритмы запуска и остановки технологических процессов. 7 Основы программирования ПЛК. Реле и контроллер Логика загружается в ПЛК с помощью программного обеспечения. Это программное обеспечение определяет, какие выходы будут активированы и какие входные условия потребуются для любых изменений. Программа управления похожа на схему физического реле, но физически нет ни реле, ни проводов, ни катушек. Все это выдумано. Программное обеспечение разрабатывается и просматривается на ПК, подключенном к интерфейсу контроллера. Есть кнопка, контроллер и индикатор. Когда кнопка неактивна, сигнал на вход контроллера не поступает. Программное обеспечение, отображающее открытый вход, не будет посылать сигнал на выход. Так, на выходе ток отсутствует и лампа не будет гореть. Если кнопка нажата, соответствующий сигнал отправляется на входной канал. Контакты переводятся в активное состояние как физическое реле. В этом случае замкнутый ранее контакт контроллера замыкается и программа отправляет сигнал на выход. Когда выходной контакт находится под напряжением, загорается индикатор. Контакты с индикатором соединены физически. И сигнал виртуальный. Однако все элементы существуют только в компьютерном программном обеспечении и не существуют как физические. Но здесь вступает в игру принцип эстафеты. Вы также можете определить условия в программе, которые проверяются и выполняются контроллером. 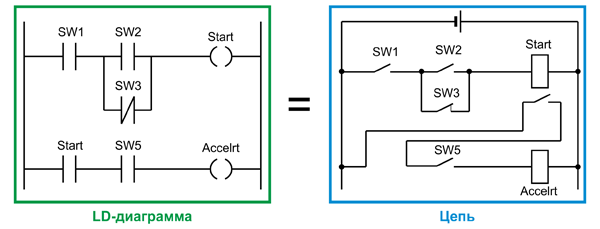 Рисунок 9 — Пример программной реализации электрической цепи Чтобы создать такую же схему, но на основе физических железных компонентов, вам понадобится три реле, где два открытых контакта — каждое из них будет использоваться. Но с помощью ПЛК вы можете использовать столько контактов, сколько хотите для каждого входа, без добавления ненужного оборудования. Команды управления релейной логикой просты и понятны инженерам-электрикам. Все логические операции видны в графическом интерфейсе. Это электрическая цепь с замкнутыми или разомкнутыми контактами. Если через цепь протекает ток, это правда. Если ток не течет, статус ложный. Программа управления основана на логических выражениях, состоящих из операндов и переменных. Программа также состоит из операторов. Операторы — это команды на языке программирования. Инженер-программист ПЛК сегодня больше инженер, чем программист. Для написания вставок на ассемблере больше не нужны сложные языки. Достаточно использовать стандартные функциональные блоки. 8 Среда программирования Языки MEK являются стандартом для программирования ПЛК. Программное обеспечение CoDeSys появилось на рынке для этих задач в начале 1990-х годов. Изделие соответствует стандарту MEK 61131-3 для работы ПЛК. Программа пользуется большим спросом из-за бесплатной лицензии. Сейчас этот программный комплекс значительно вырос. Помимо редактора кода, отладчика и компилятора, интегрированных в систему, он также включает в себя конфигуратор элементов управления, промышленных сетей, редактор для создания мнемонических диаграмм, сервер отладки, серверы OPC и DDE. Многие производители ПЛК предлагают эту среду в качестве основного рабочего инструмента. 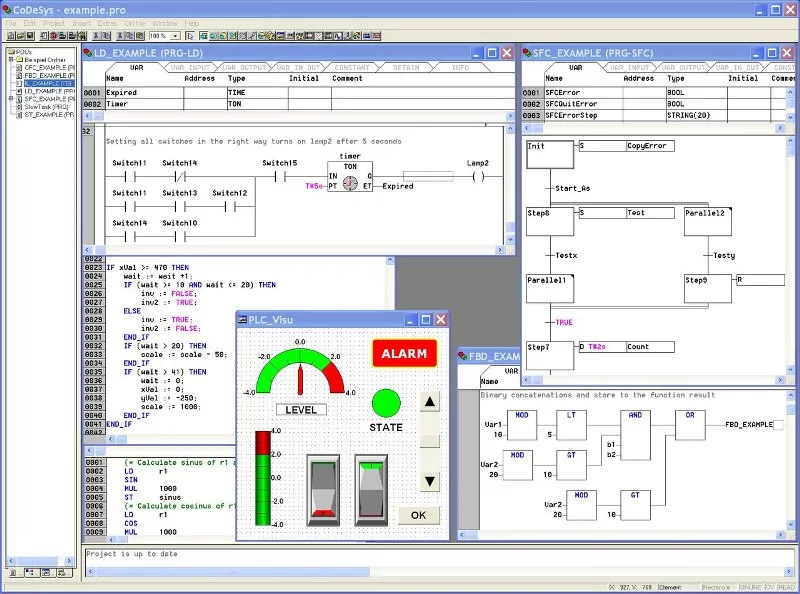 Рисунок 10 — пример программы в окне CoDeSys. 9 Программирование ПЛК Конфигурируемые: несколько программ хранятся в ПЛК, и требуемая версия программы выбирается с помощью клавиатуры ПЛК; Свободно программируемые: программа загружается в ПЛК через специальный интерфейс с персонального компьютера с использованием специального программного обеспечения производителя, иногда с помощью программатора. Программирование ПЛК отличается от традиционного программирования. Это связано с тем, что ПЛК выполняют бесконечную последовательность программных циклов, каждый из которых: считывание входных сигналов, в том числе манипуляций, например, на клавиатуре оператором; вычисления выходных сигналов и проверка логических условий; выдача управляющих сигналов и при необходимости управление индикаторами интерфейса оператора. Поэтому при программировании API используются флаги — булевы переменные знаков прохождения программного алгоритма некоторых ветвей условных переходов. Следовательно, при программировании ПЛК от программиста требуются определенные навыки. Например, процедуры начальной инициализации системы после сброса или включения. Эти процедуры нужно выполнить только один раз. Поэтому вводится логическая переменная (флаг) завершения инициализации, которая устанавливается, когда инициализация завершается. Программа анализирует этот флаг и, если он установлен, обходит выполнение кода процедур инициализации. 10 Применение контроллеров Логические контроллеры в большом количестве встречаются на автоматических линиях и сборочных линиях. Устройства можно встретить на стендах для испытания двигателей, на прессовых устройствах, токарных автоматах, сварочных аппаратах, для резки металла. Устройства управления также используются при автоматизации технологических процессов и быта. СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ Свободная энциклопедия — Википедия (ред. от 06.02.2019) — Разделы 1, 2, 5, 6, 7, 13, 15 — URL: https://ru.wikipedia.org/wiki/Программируемый_логический_контроллер (Дата обращения: 06.10.2021) Статья на сайте Adruinoplus (ред. 11.12.2019 ) — Разделы 3, 4, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17 — URL: https://arduinoplus.ru/programmiruemii-logicheskii-kontroller/ (Дата обращения: 06.10.2021) Статья на сайте Компэл (ред. 14.12.2018) — Разделы 3, 8, 12, 15 — URL: https://www.compel.ru/lib/95591 (Дата обращения 02.11.2021) Свободная энциклопедия — Википедия (ред. от 06.02.2019) — Раздел 7 — URL: https://ru.wikipedia.org/wiki/RS-232 (Дата обращения: 06.10.2021) Свободная энциклопедия — Википедия (ред. от 06.02.2019) — Раздел 7 — URL: https://ru.wikipedia.org/wiki/RS-485 (Дата обращения: 06.10.2021) Свободная энциклопедия — Википедия (ред. от 06.02.2019) — Раздел 7 — URL: https://ipc2u.ru/articles/prostye-resheniya/modbus-rtu/ (Дата обращения: 06.10.2021) Свободная энциклопедия — Википедия (ред. от 06.02.2019) — Раздел 7 — URL: https://en.wikipedia.org/wiki/CC-Link_Open_Automation_Networks (Дата обращения: 06.10.2021) Свободная энциклопедия — Википедия (ред. от 06.02.2019) — Раздел 7 — URL: https://ru.wikipedia.org/wiki/Profibus (Дата обращения: 06.10.2021) |