курсовой проект апкр. КП_АДКР. Расчёт асинхронного двигателя постоянного тока с коротко замкнутым ротором
 Скачать 0.93 Mb. Скачать 0.93 Mb.
|

|
8. Расчёт рабочих характеристик В курсовом проекте предполагается использовать аналитический метод расчёта рабочих характеристик, основанный на использовании Г-образной схемы замещения (рис. 8.1) 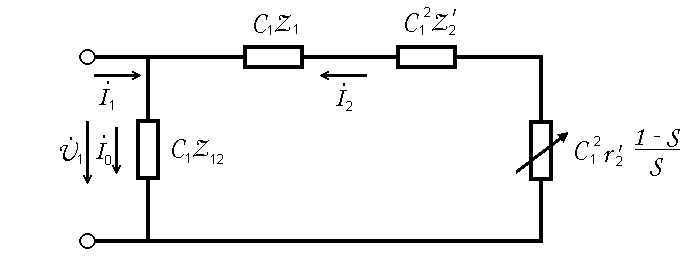 Рис. 8.1. Г-образная схема замещения На этой схеме обозначено: В двигателях с Перед расчётом рабочих характеристик необходимо рассчитать постоянные, не зависящие от скольжения величины. 8.1. Потери в стали и механические (постоянные потери), кВт 8.2. Активная и реактивная составляющие тока синхронного холостого хода 8.3. Активная и реактивная составляющие сопротивления намагничивающей ветви схемы замещения, Ом 8.4. Постоянные величины 8.5. Принять предварительно скольжение в номинальном режиме 
Таблица 8.1 8.6. Номинальные данные спроектированного двигателя. По данным расчёта (табл. 8.1) построим рабочие характеристики      9. Расчёт пусковых характеристик 9.1) Соразмерная приведенная высота стержня ротора при расчётной температуре 115 где 9.2) Глубина проникновения тока в стержень, мм где 9.3) Площадь сечения части стержня, ограниченной высотой 9.4) Отношение площади всего сечения стержня 9.5) Коэффициент увеличения сопротивления фазы ротора под влиянием эффекта вытеснения тока 9.6) Приведенное активное сопротивление обмотки ротора с учётом действия эффекта вытеснения тока 9.7) Коэффициент магнитной проводимости пазового рассеяния ротора с учётом вытеснения тока  где коэффициент где 9.8) Коэффициент изменения индуктивного сопротивления фазы обмотки ротора от действия эффекта вытеснения тока 9.9) Индуктивное сопротивление фазы обмотки ротора с учётом вытеснения тока 9.10) Ток ротора без учёта влияния насыщения коронок зубцов полями пазового рассеяния  9.11) Предполагаемая кратность увеличения тока, обусловленная уменьшением индуктивных сопротивлений из-за насыщения зубцовых зон 9.12) Предварительное значение тока фазы статора с учётом насыщения 9.13) Средняя М.Д.С. обмотки статора, отнесённая к одному пазу 9.14) Активная индукция магнитного поля рассеяния в воздушном зазоре 9.15) Коэффициент 9.16) Дополнительное раскрытие пазов статора и ротора, учитывающее уменьшение потока пазового рассеяния из-за насыщения 9.17) Уменьшение коэффициента магнитной проводимости пазового рассеяния статора и ротора 9.18) Коэффициент магнитной проводимости пазового рассеяния статора и ротора при насыщении 9.19) Коэффициент магнитной проводимости дифференциального рассеяния статора и ротора при насыщении зубцов 9.20) Индуктивное сопротивление обмотки статора с учётом влияния насыщения и вытеснения тока, Ом 9.21) Коэффициент связи параметров Г-образной и Т-образной схемы замещения где 9.22) Расчётное активное и реактивное сопротивления, Ом 9.23) Ток обмотки ротора, приведённый в обмотке статора, А 9.24) Ток обмотки статора, А 9.25) Расхождения полученных значений  9.26) Относительные значения тока статора и электромагнитного момента   После п.9.21 уточняется значение критического скольжения по формуле:  , ,в которую в качестве Далее рассчитываются п. 9.22…9.26 при Примерный вид пусковых характеристик приведен на рис. 9.4.
П  усковые характеристики усковые характеристики 10. Оценка спроектированного двигателя Сравнение показателей спроектированного двигателя с требованием ГОСТ 19523-81
Вывод После обработки данных в таблице и сравнения по ГОСТу с серийным двигателем можно сделать вывод: полученный двигатель имеет преимущества по К.П.Д., по по выходной мощности Но имеет недостатки по величине: максимального момента пускового момента пускового тока Максимальный момент пропорционален квадрату напряжения U1 и обратно пропорционален xk=x1+x2’, в данном случае небольшую кратность максимального момента можно объяснить тем, что более высокие значения Пусковой момент пропорционален квадрату напряжения и зависит от r2 смещая макс. момент за счет увеличения r2 ,можно получить Mmax=Mп. В большинстве электроприводов желательно иметь пусковой момент близким к максимальному. Это обеспечивает механическая характеристика с повышенным сопротивлением в цепи ротора. Литература: методические указания по проектированию асинхронного двигателя с короткозамкнутым ротором И. П. Копылов., “Проектирование электрических машин”, Изд.”Высшая школа”,2002 И. П. Копылов., “Электрические машины”, Изд.”Высшая школа”,2000 4)М. М Кацман “Электрические машины”, Изд.”Высшая школа”,2003 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||