Курсовая работа МПТ. Расчет электромагнита постоянного тока по дисциплине
 Скачать 0.56 Mb. Скачать 0.56 Mb.
|

|
4. Определение интегральных характеристик Вычислим потокосцепление электромагнита, оно будет состоять из суммы потокосцеплений якоря, зазора и стопа:  Для того, чтобы оценить усилие электромагнита, получаемое в зазоре, воспользуемся следующей формулой:  Где  – падение МДС в зазоре определяемое по формуле: – падение МДС в зазоре определяемое по формуле: λs – удельная проводимость рассеяния; λs – удельная проводимость рассеяния; , lк – длина якоря при текущем зазоре и высота катушки соответственно; , lк – длина якоря при текущем зазоре и высота катушки соответственно; - высота зазора; - высота зазора; - диаметр якоря. - диаметр якоря.Семейства потокосцеплений(Вб) электромагнита  представлены в таблице 3. представлены в таблице 3.Семейство статических нагрузочных характеристик (Н) электромагнита  представлены в таблице 4. представлены в таблице 4.Таблица 3 -Семейство потокосцеплений(Вб) электромагнита 𝛹=𝑓(𝑖,𝛿)
Таблица 4 – Семейство статических нагрузочных характеристик (Н) электромагнита 𝑃эм=𝑓(𝑖,𝛿)
Построим семейство статических нагрузочных характеристик электромагнита для различной величины зазора, используя данные таблицы (4), представленных на рисунке 4  Рисунок 4 – Семейство статических нагрузочных характеристик Также построим семейство характеристик намагничивания электромагнита по таблице (3), представленных на рисунке 5.  Рисунок 5 – семейство характеристик намагничивания 5. Расчет динамических характеристик Динамика электромагнита характеризуется следующими основными переменными во времени:  – тока – тока – потокосцепления – потокосцепления – электромагнитной силы – электромагнитной силы – перемещения – перемещения – скорости якоря – скорости якоряЭти зависимости обычно определяются при срабатывании ЭМ при его включении или отключении с использованием методов физического макетирования и математического моделирования. Всю динамику срабатывания электромагнита можно разделить на 3 участка(рис.6): 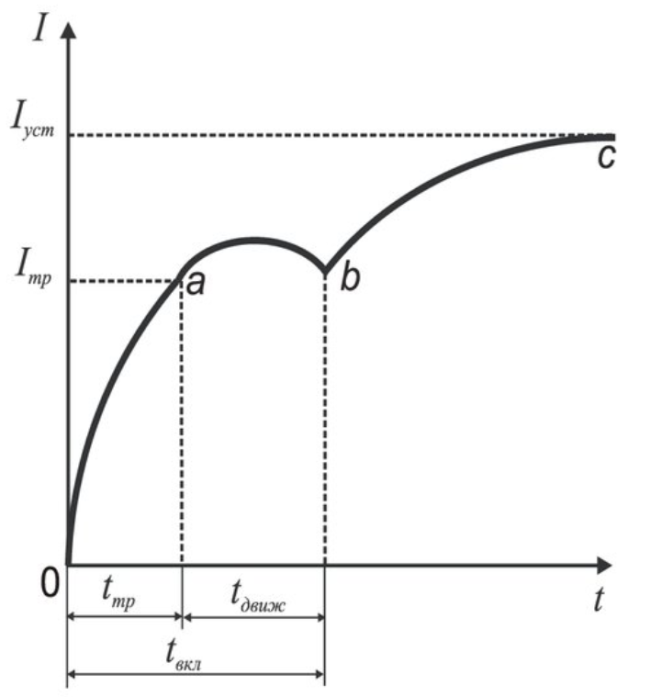 Рисунок 6 – Динамика срабатывания электромагнита Первый (участок 0-а). Ток мал, тяговое усилие электромагнита меньше силы противодействующих пружин, якорь неподвижен. Время от момента приложения напряжения до момента трогания якоря – время трогания на включение. Второй (участок а-b). Тяговое усилие электромагнита начинает превышать силы противодействующих пружин. Якорь трогается до момента соответствующего конечному зазору  . Время от момента трогания до момента остановки якоря – время движения. . Время от момента трогания до момента остановки якоря – время движения.Третий (участок b-c). Ток в катушке нарастает до установившегося значения.Для расчета динамических характеристик воспользуемся методом Лысова. Он применим к любой конструкции электромагнита. Основой для расчета является семейство характеристик намагничивания(рис.5). Для расчета этим методом записывают уравнения электродинамики.  Для решения данной системы, уравнения динамики записывают в конечных разностях, используя условие электрического равновесия в системе. Тогда система принимает следующий вид:  Где  – среднее значение тока на интервале – среднее значение тока на интервале   – разность потокосцеплений текущего и предыдущего интервала времени – разность потокосцеплений текущего и предыдущего интервала времени   – среднее электромагнитное усилие на интервале – среднее электромагнитное усилие на интервале  – среднее противодействующее усилие на интервале – среднее противодействующее усилие на интервале  – перемещение якоря на интервале – перемещение якоря на интервале  – скорости перемещения якоря на текущем и предыдущем участках – скорости перемещения якоря на текущем и предыдущем участкахПеред расчетом на необходимо определить следующие величины: – установившийся ток  – массу якоря   Также необходима механическая характеристика срабатывания электромагнита, представленная на рисунке 7.  Рисунок 7 - механическая характеристика |