Курсовая работа по сх машинам. Расчет конструктивных параметров сельскохозяйственных машин по дисциплине Сельскохозяйственные машины
 Скачать 0.84 Mb. Скачать 0.84 Mb.
|

| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 ВВЕДЕНИЕ
ВВЕДЕНИЕ
 Машины для поверхностной обработки почвы
Машины для поверхностной обработки почвы| Тип лапы | Захват, мм | Вылет стойки, мм | Схема |
| Плоскорежущая одностороння | 85, 120, 150, 165 | | |
| Рыхлительная долотообразная | 50 | 110, 205 | 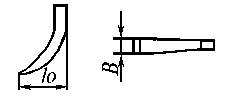 |
| Стрельчатая | 150, 220, 250, 270, 300, 330, 380 | 120, 130, 145, 172 | 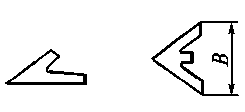 |
Стрельчатые лапы используются как на культиваторах для сплошной обработки почвы, так и на пропашных. Они бывают плоскорежущие (угол крошения β=12…18°) и универсальные (угол крошения β=28...30°). Универсальные лапы при движении кроме подрезания сорняков рыхлят почву.
Рыхлительные лапы предназначены для рыхления почвы на глубину до 25 см и подразделяются на оборотные, копьевидные и долотообразные.
 Размещение лап на раме культиватора проводится, исходя из условия предотвращения забивания культиватора растительными остатками, с учётом зоны распространения деформации почвы по ходу лапы, перекрытия - ширины междурядий и защитной зоны.
Размещение лап на раме культиватора проводится, исходя из условия предотвращения забивания культиватора растительными остатками, с учётом зоны распространения деформации почвы по ходу лапы, перекрытия - ширины междурядий и защитной зоны.Согласно условиям выбранного варианта выбираются следующие данные:
Таблица 2 – Исходные данные
| Вариант | Ширина захвата лапы, мм | Вылет стойки, мм | Глубина обработки, мм | Обработка паров или почвы под посев |
| 12 | 300 | 172 | 130 | пшеница |
Исходя из этих условий, минимальное расстояние между рядами лап можно определить по формуле:
 (1)
(1)где
 – вылет стойки лапы , мм;
– вылет стойки лапы , мм; h – глубина обработки почвы, мм;
α – угол входа лапы в почву, α = 25…40°;
φ – угол трения почвы по металлу, φ = 25...35°.
 .
.Оптимальное значение L находится в пределах 400...500 мм.
Расстояние между лапами в ряду при сплошной обработке почвы (рис. 5) определяется по формуле:
 (2)
(2)где
 – ширина захвата одной лапы, мм;
– ширина захвата одной лапы, мм; – значение перекрытия, = 40...80 мм.
– значение перекрытия, = 40...80 мм.
| Рисунок 1 – Схема размещения стрельчатых лап при сплошной обработке почвы |
 Изменение направления движения характеризуется углом β:
Изменение направления движения характеризуется углом β: (3)
(3)где β – угол поворота культиватора, определяющий значение перекрытия.
Ширина полосы, обрабатываемой одной лапой:
 (4)
(4)
Число лап, размещаемых на культиваторе:
 (5)
(5)где
– ширина захвата культиватора, мм. .
.Согласно заданному варианту для расчёта параметров пропашного культиватора для междурядной обработки почвы приняты следующие данные:
Таблица 3 – Исходные данные
| Вариант | Ширина захвата плоскорежущей лапы, мм | Ширина междурядья, мм | Глубина обработки, мм | Защитная зона, мм |
| 12 | 165 | 900 | 140 | 250 |
 При междурядной обработке почвы расстояние между рядками с учётом перекрытия и защитной зоны (рис. 6) определяется по формуле:
При междурядной обработке почвы расстояние между рядками с учётом перекрытия и защитной зоны (рис. 6) определяется по формуле: (6)
(6)где с – значение защитной зоны, мм, с = 60... 110 мм;
 – ширина захвата односторонней лапы, мм;
– ширина захвата односторонней лапы, мм;  – ширина захвата стрельчатой лапы, мм.
– ширина захвата стрельчатой лапы, мм.
Зная величину междурядий S (табл. 2, П.1), необходимо определить ширину захвата стрельчатой лапы:
 (7)
(7)
Определив значение
, по таблице 1 выбираем стандартную стрельчатую лапу, наиболее близкую по ширине захвата. Далее зная величину междурядий и параметры рабочих органов необходимо определить значение ∆b (рис. 2). 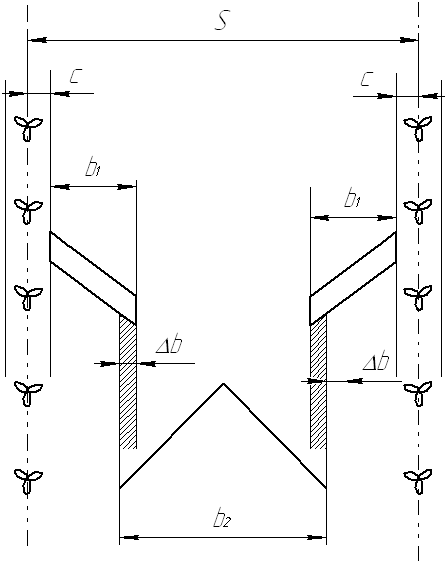 | 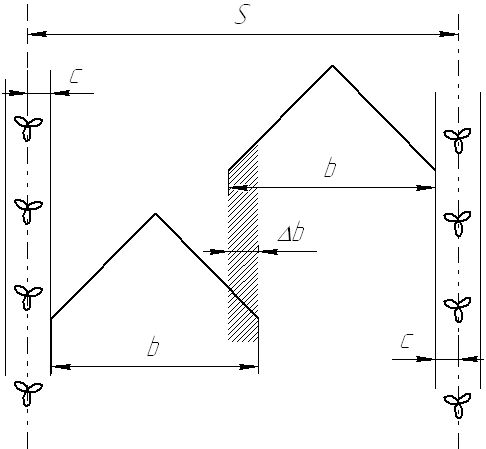 |
| Рисунок 2 – Схема размещения односторонних плоскорежущих и стрельчатых лап при междурядной обработке почвы | Рисунок 3 – Схема размещения стрельчатых лап при междурядной обработке почвы |
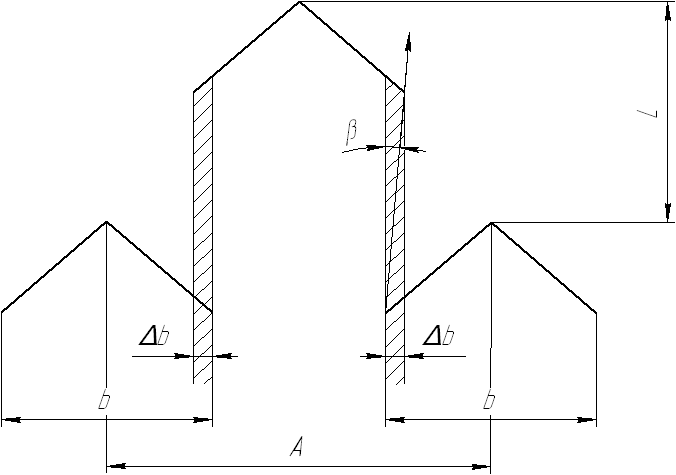
 Расстояние между рядками при обработке стрельчатыми лапами (рис. 3) определяется по формуле
Расстояние между рядками при обработке стрельчатыми лапами (рис. 3) определяется по формуле (8)
(8) .
.Исходя из величины междурядий S , по таблице 1 подбираются стрельчатые лапы с необходимой шириной захвата. Значение ∆b определяется по формуле:
 (9)
(9)
Расстояние между рыхлительными лапами, установленными на культиваторы для междурядной обработки почвы, определяется по формуле:
 (10) где W – угол внутреннего трения почвы, W = 40...50°.
(10) где W – угол внутреннего трения почвы, W = 40...50°. .
. Для расчета тягового сопротивления согласно заданному варианту используются следующие данные:
Для расчета тягового сопротивления согласно заданному варианту используются следующие данные:Таблица 4- Исходные данные
| Вариант | Тип лапы | Ширина захвата, см | Глубина хода лапы, см | Тип почвы | Влажность почвы, % | Сила, Н | ||||||||
| 12 | полольная | 33 | 9 | Чернозем | 17,5 | 400 | ||||||||
| Для определения тягового сопротивления КПС-4 | ||||||||||||||
| Вариант |  , ,кг |  , ,см | h', см | h1, см | ∆h, см |  , ,см |  , ,см |  , см , см | L, см |  , ,см | ||||
| 12 | 780 | 267 | 46 | 46 | 5 | 349 | 280 | 280 | 64 | 41 | ||||
Тяговое сопротивление (рис. 8) определяется по формуле:
 (11)
(11)где
 – сопротивление перекатыванию колёс, Н.
– сопротивление перекатыванию колёс, Н.
f – коэффициент сопротивления перекатыванию, f≈ 0,25;
 – опорная реакция, Н.
– опорная реакция, Н.n – общее число лап на культиваторе;
 – составляющая сопротивления, действующего на одну лапу;
– составляющая сопротивления, действующего на одну лапу; Тпод – сопротивление подъёму рабочих органов, Н. Сопротивление подъёма рабочих органов принимается равным Тпод ≈ 80 Н.
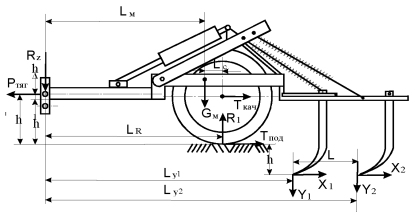 Рисунок 8 – Схема культиватора КПС-4
Рисунок 8 – Схема культиватора КПС-4 (12)
(12)Выражение
 при двухрядном размещении лап определяется как:
при двухрядном размещении лап определяется как: (13)
(13)где
 – составляющая сопротивления, действующего на одну лапу, Н;
– составляющая сопротивления, действующего на одну лапу, Н;  число лап в первом и втором рядах культиватора соответственно.
число лап в первом и втором рядах культиватора соответственно.  .
. По формуле 12 находим опорную реакцию R1:
По формуле 12 находим опорную реакцию R1:

По формуле 11 находим тяговое сопротивление Ртяг:
 .
. (14)
(14)где
 .
. 
При транспортном положении тяговое сопротивление определяется по выражению:
 (15)
(15) .
.