Расчёт ленточного конвейера. Расчёт ленточного конвейера
 Скачать 196.65 Kb. Скачать 196.65 Kb.
|

|
Расчёт ленточного конвейера Ленточные конвейеры являются одним из основных средств транспортирования сыпучих и штучных грузов в промышленности, строительстве, сельскохозяйственном производстве и на предприятиях перерабатывающей промышленности. Основным тяговым и грузонесущим элементом конвейера, является прорезиненная вертикально замкнутая лента, огибающая концевые барабаны, один из которых называется приводным , а другой – натяжным. На верхней ветви ленты перемещается транспортируемый груз, она является грузонесущей (рабочей), нижняя ветвь является холостой (нерабочей). На всем протяжении трассы лента поддерживается роликоопорами верхней и нижней ветвей, в зависимости от конструкции которых лента имеет плоскую или желобчатую форму. Поступательное движение конвейер получает от фрикционного привода, необходимое первоначальное натяжение ленты обеспечивается натяжным устройством. Груз поступает на ленту через одно или несколько загрузочных устройств, разгрузка производится с концевого барабана в приемный бункер (концевая) или в любом пункте вдоль трассы конвейера с помощью барабанных или плужковых разгружателей (промежуточная). Очистка ленты от прилипших частиц груза осуществляется с помощью очистных устройств. Ленточные конвейеры являются наиболее распространенным средством непрерывного транспорта и благодаря высоким эксплуатационным качествам широко используются для перемещения насыпных и штучных грузов во всех отраслях промышленности и сельского хозяйства, на складах и в зерновых элеваторах в качестве элементов погрузочных и перегрузочных устройств и технологических машин. Ленточные конвейеры обеспечивают высокую производительность нескольких сотен т/ч, независимо от длины установки со скоростью транспортирования до 6,0 м/с. Преимуществами ленточных конвейеров являются: простота конструкции, высокая производительность при больших скоростях движения ленты, большая протяженность трассы, высокая надежность. Надежность работы ленточных конвейеров определяется, в основном, увеличением сроков службы наиболее быстро изнашиваемых элементов конвейера, которым относятся ролики и конвейерная лента, устойчивостью движения ленты и качеством ее очистки от налипающего транспортируемого груза. Определение основных параметров ленточного конвейера. Производительность конвейера  Транспортируемый материал – гранитный щебень, сортированный Максимальный размер кусков  Насыпная плотность материала  Длина конвейера  Угол наклона конвейера  Материал ленты конвейера – ТА100 Условия работы конвейера – на открытом воздухе 1. Начертить схему наклонного конвейера. 2. Определить необходимую ширину ленты конвейера. 3. Определить необходимое количество прокладок в ленте. 4. Рассчитать максимальное натяжение ленты. 5. Выбрать электродвигатель. 6. Определить основные конструктивные размеры барабанов конвейера. 7. Подобрать редуктор. Решение: 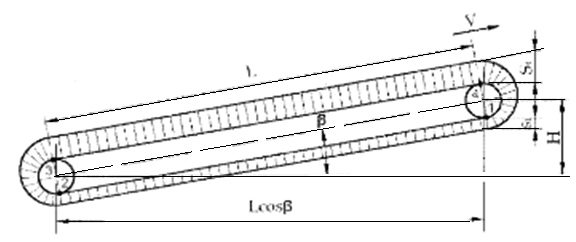 Рисунок 1 Расчётная схема ленточного конвейера 1. Определим необходимую ширину ленты по заданной производительности   производительность конвейера производительность конвейера насыпная плотность материала насыпная плотность материала коэффициент, зависящий от угла естественного откоса груза коэффициент, зависящий от угла естественного откоса груза  коэффициент, зависящий от угла наклона конвейера коэффициент, зависящий от угла наклона конвейера при при  скорость движения ленты скорость движения ленты Скорость движения ленты назначаем в зависимости от рода транспортируемого груза  для щебня для щебняШирина ленты  Ширина конвейерной ленты, определенная из условия заданной производительности, должна быть проверена по крупности транспортируемого материала. Для сортированного груза   Окончательно ширину ленты выбираем по ГОСТ22647-77 из нормального ряда, округлив расчетное значение ширины до ближайшего большего,  После выбора стандартной ширины ленты уточним рабочую скорость движения ленты   расчётная ширина ленты расчётная ширина ленты принятое значение ширины ленты предварительно выбранная скорость принятое значение ширины ленты предварительно выбранная скорость 2. Определим необходимое количество прокладок конвейерной ленты Для каждой стандартной ширины ленты имеется допускаемый диапазон количества прокладок Для   3. Наибольшее натяжение ленты определим методом обхода по тяговому контуру (рисунок 2). Но схеме конвейера поставлены основные характерные точки. Точка 1 – точка сбегания ленты или точка с минимальным напряжением принимается за начало обхода по контуру. В точке 1 лента конвейера имеет наименьшее натяжение Усилие в точке 2   сопротивление на порожней ветви конвейера сопротивление на порожней ветви конвейераУсилие в точке 3 тягового контура конвейера   коэффициент сопротивления коэффициент сопротивления Усилие в точке 4 тягового контура конвейера   сопротивление на наклонном участке грузовой ветви конвейера сопротивление на наклонном участке грузовой ветви конвейераНайдём сопротивления  и и  Сопротивление на участке 1 – 2   погонная масса ленты погонная масса ленты угол наклона конвейера угол наклона конвейера погонная масса вращающихся частей роликоопор порожней ветви погонная масса вращающихся частей роликоопор порожней ветви  длина конвейера длина конвейера коэффициент сопротивления движению ленты по роликоопорам коэффициент сопротивления движению ленты по роликоопорам при работе на открытом воздухе при работе на открытом воздухеПогонная масса ленты  плотность ленты плотность ленты ширина ленты ширина ленты толщина ленты толщина ленты  количество тяговых прокладок количество тяговых прокладок   толщина тяговой тканевой прокладки толщина тяговой тканевой прокладки   толщина защитной тканевой прокладки толщина защитной тканевой прокладки  толщина резиновой обкладки рабочей поверхности конвейерной ленты толщина резиновой обкладки рабочей поверхности конвейерной ленты   толщина резиновой обкладки нерабочей поверхности конвейерной ленты толщина резиновой обкладки нерабочей поверхности конвейерной ленты Толщина ленты  Погонная масса ленты  Сопротивление на участке 1 – 2  Сопротивление на участке 3 – 4   погонная масса транспортируемого груза погонная масса транспортируемого груза  погонная масса вращающихся частей роликоопор гружёной ветви погонная масса вращающихся частей роликоопор гружёной ветви Сопротивление на участке 3 – 4  Силы натяжения  и и  связаны соотношением связаны соотношением  коэффициент трения между барабаном и лентой коэффициент трения между барабаном и лентой угол обхвата лентой поверхности приводного барабана угол обхвата лентой поверхности приводного барабана          Зная наибольшее натяжение ленты, определяем количество прокладок в ленте.    удельное допускаемое напряжение 1см одной прокладки удельное допускаемое напряжение 1см одной прокладки Количество прокладок в ленте.  Найденное количество прокладок лежит в требуемом диапазоне. 4. Выберем привод конвейера Схема привода ленточного конвейера приведена на рисунке 2. 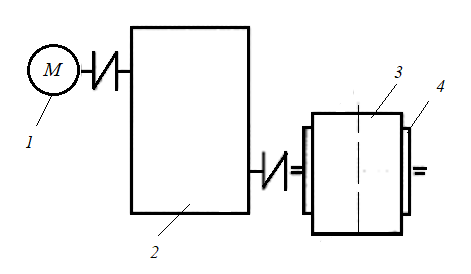 Рисунок 2 Схема привода конвейера 1 – двигатель, 2 – редуктор, 3 – лента, 4 – барабан Необходимая мощность двигателя   необходимое тяговое усилие на приводном барабане конвейера необходимое тяговое усилие на приводном барабане конвейера КПД привода барабана КПД привода барабана Тяговое усилие на приводном барабане конвейера   Необходимая мощность двигателя  Мощность электродвигателя   коэффициент запаса мощности двигателя коэффициент запаса мощности двигателя  Выбираем серийный электродвигатель МТВ 211-6 Мощность на валу  Продолжительность включения  Частота вращения  5. Определим основные конструктивные размеры барабанов конвейера   Диаметр натяжного барабана  Длина барабана  6. Подбираем редуктор Передаточное число редуктора   частота вращения двигателя частота вращения двигателя частота вращения барабана частота вращения барабана Передаточное число редуктора  Литература: 1. Александров М. П. Подъемно-транспортные машины. – С-Пб.: Лань, 2012 2. Вайнсон А. А. Подъемно-транспортные машины. – М.: Альянс, 2016 3. Зенков Р. Л., Ивашков И. И., Колобов Л. Н. Машины непрерывного транспорта. – М.: Академия, 2010 4. Скопичев В. Г., Максимюк Н. Н. Транспортные машины. – С-Пб.: Лань, 2014 5. Спиваковский А. В., Дьячков В. К. Транспортирующие машины. – М.: Альянс, 2014 6. Федотов П. И. Подъемно-транспортные машины. – М.: АСВ, 2015 7. Шестопалов К. К. Подъемно-транспортные, строительные и дорожные машины и оборудование. – М.: Академия, 2012 |