Министерство науки и высшего образования Российской Федерации
Федеральное государственное автономное образовательное учреждение высшего
образования «Южно–Уральский государственный университет
(национальный исследовательский университет)»
Факультет «Электротехнический»
Кафедра «Автоматики»
Направление подготовки «Управление в технических системах»
Перспективы применения промышленных роботов
РЕФЕРАТ
По дисциплине «Введение в направление»
Нормоконтролер
ст. преподаватель
______________ С.В. Ярушина
«_____»______________2021 г.
|
Руководитель
ст. преподаватель
______________ С.В. Ярушина
«_____»______________2021 г.
|
|
Автор работы
студент группы МиЭТ –126
_______________А.С. Коротков
«_____»______________2021 г.
|
Миасс 2021
Аннотация
В представленной мной работе рассмотрим перспективы применения промышленных роботов. Историю их появления и разновидности. Разберем структуру промышленного робота, а самое главное, мы узнаем ключевые технологические тренды в области роботостроения, и как робот с легкостью заменяет сотню рабочих на производстве.
Оглавление
Обозначения и сокращения 1
Обозначения и сокращения
ПР – промышленный робот;
ИИ – искусственный интеллект;
ПО – программное обеспечение;
ЭВМ – электронно–вычислительная машина;
Введение
Промышленный робот – это автономное устройство, предназначенное для выполнения двигательных и управляющих функций в производственном процессе манипуляционный робот, т. е. автоматическое устройство, состоящее из манипулятора и перепрограммируемого устройства управления, которое формирует управляющие воздействия, задающие требуемые движения исполнительных органов манипулятора. Применяется для перемещения предметов производства и выполнения различных технологических операций.
Особенность роботов заключается в том, что они могут работать круглосуточно без какого–то либо отдыха. Человек, в процессе осуществления деятельности электронной машины, не принимает участия. Чтобы робот функционировал, нужно правильно задать программу. Они действуют по строго установленному алгоритму. Система запрограммирована под определенное действие, и устройство выполняет только их.
ПР позволяют создать полный цикл производства. Производительность и точность действий осуществляется на высоком уровне. К тому же, благодаря устройствам удается избежать ошибок почти полностью. Одним словом, полностью исключается человеческий фактор.
История создания и применения промышленных роботов
Первых промышленных роботов начали создавать еще в середине 1950–ых годов в США.
В 1954 году американский инженер Джордж Девол разработал робота промышленного назначения «Unimate» для погрузочно–разгрузочных работ.
В 1956 году вместе с Джозефом Энгельбергом создает первую в мире компанию «Unimation» по выпуску промышленных роботов.
В 1967 году началось глобальное применение ПР в Европе. Вскоре, в ряде стран ( Швеция, Япония, Великобритания, Италия и т.д.) начался выпуск роботов собственного производства, и к концу 1970–ых Япония выходит на первое место в мире по годовому выпуску промышленных роботов, установленных на предприятиях страны.
В 1971 году первый роботы появились и в СССР. Созданы они были под руководством профессора Петра Николаевича Белянина (УМ–1) и лауреатом Государственной премии СССР Борисом Николаевичем Суреным («Универсал–50»).
В 1972–1975 годах был создан уже целый спектр советских промышленных роботов: ПР–5, роботы серии «Универсал», ИЭС–690, МП–9С, ТУР–10 и другие.
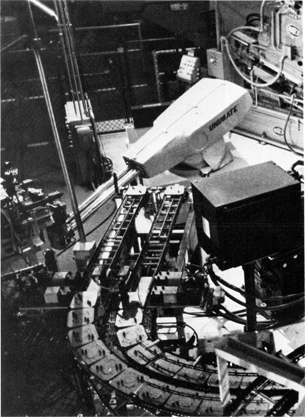   
Рисунок 1– Робот «Unimate»
Рисунок 1.1 – Робот серии «Универсал»
Виды промышленных роботов. Автоматические роботы
В эту категорию роботов входят:
Программные – самый простой вид роботов. Управляют ими автоматически. Устройства применяются во многих сферах деятельности, и связано это с низкой стоимостью. Все действия, которые совершает машина, выполняются по заданной циклической программе, которая заносится в память.
Адаптивные. Этот вид роботов работает с помощью разных программ, а управлять ими можно с помощью сенсора. Сигналы поступают благодаря датчикам. Они проводят анализ окружающей обстановки и задают алгоритм действия. Робот сам принимает решения, как ему поступить в той или иной ситуации. Например, если у него не получается выполнить первую операцию, он может начать выполнять вторую.
Обучаемые. Роботы, которые могут учиться. Перед тем, как приступить к работе, устройства проходят специальное обучение. И только после этого они выходят на производство.
Интеллектуальные. Новейшая система, которая оснащена искусственным интеллектом. На окружающую среду они реагируют с помощью сенсорных датчиков. Они моделируют виртуальное пространство и потом ориентируются на следующие действия.
 
Рисунок 2 – Автоматический робот
Биотехнические роботы
Категория состоит из следующих видов:
Командные. Роботы–манипуляторы, которые управляются оператором. Он дает команды каждому сочленению. Но, если говорить откровенно, то устройства работают не полностью.
Копирующие. Еще один вид роботов–манипуляторов, которые не могут полноценно существовать. Для работы им нужен оператор. Все, что делает человек, выполняет и робот.

Рисунок 3 – биотехнические роботы
Полуавтоматические. Оператор задает перемещение органа манипулятора и тем самым заставляет робота совершать действия. 
Интерактивные роботы
Вид состоит из следующих подвидов:
Автоматизированные. Машины, в которых чередуются между собой биотехнические и автоматические процессы.
Супервизорные. Работают автоматически. Но перед началом рабочего процесса им задается определенный цикл.
Диалоговые. Эти роботы могут не только осуществлять какие–то действия, но и общаться с оператором на специальном языке.
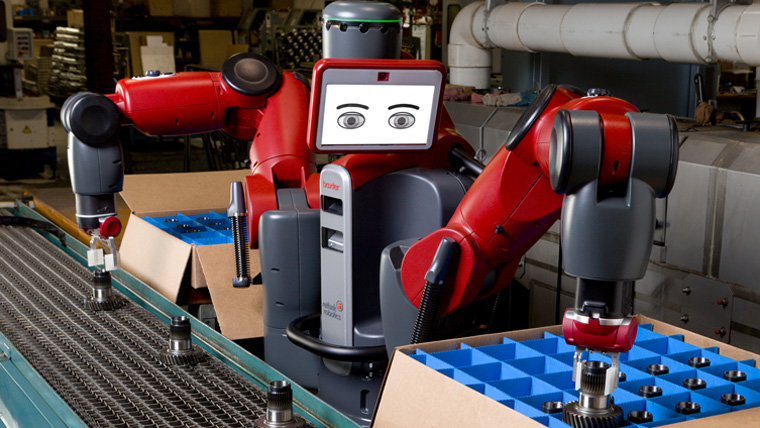

Рисунок 4 – Интерактивный робот
Структура и устройство промышленных роботов
Основными компонентными частями ПР являются манипуляторы и устройство управления, каждая их этих частей в свою очередь включает ряд блоков.
Рабочий орган – составная часть исполнительного устройства промышленного робота для непосредственного выполнения технологических операций и/или вспомогательных переходов.
Манипулятор – управляемое устройство или машина для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве, оснащенное рабочим органом.
Блок управления – последовательность управляющих сигналов формируется в ЭВМ на основании программы, предварительно записанной в нее оператором через систему связи.
Исполнительный механизм – механическая часть исполнительного устройства промышленного робота, реализующая двигательную функцию – представляет собой систему твердых и упругих тел, соединенных между собой различными видами связей.
Корпус промышленного робота – сложносоставной и состоит из отдельных звеньев. Самое нижнее, нулевое звено, – это основание робота. К нему через редуктор первой оси крепится корпус первого звена, а к корпусу первого звена, через редуктор второй оси, корпус второго звена. Третье звено при помощи редуктора третьей оси крепится к корпусу второго звена. Четвертое, пятое и шестое звенья образуют модуль, называемый запястье.
Редуктор (Привод) – основной задачей редуктора является увеличение силы вращения мотора, за счет снижения скорости вращения. Внутри редуктора находится множество механических передач разного рода, устроенных таким образом, чтобы вращение вала двигателя преобразовывалось в более мощное вращение на выходе из редуктора, но с меньшей скоростью. Таким образом, уменьшая вращение мотора в 10 раз, можно достичь десятикратного увеличения мощности привода.
Сервомоторы – это высокопроизводительные моторы, способные точно контролировать положение и скорость. Различают следующие степени подвижности: координатные (глобальные) – обеспечивающие выведение манипулятора в зону манипулирования; переносные (рабочие) – определяющие выведение захвата в заданные места рабочей зоны; ориентирующие (локальные) – обеспечивающие требуемые ориентации захвата в заданном месте рабочей зоны.
Энкодер — это устройство, которое указывает положение (угол) вала вращения двигателя. При наличии энкодера, можно получить четкие данные о том, как и в каком направлении, движется робот.
Трансмиссия или ременная передача — является компонентом, который передает крутящий момент, вырабатываемый приводами и редукторами и преобразует его в движение робота. Трансмиссия также способна изменять направление и величину мощности привода.
Контроллер – устройство, которое задает по выполнению определенную последовательность действий роботом
Объект манипулирования – тело, перемещаемое в пространстве манипулятором. К объектам манипулирования относят заготовки, детали, вспомогательный, мерительный или обрабатывающий инструмент, технологическую оснастку и т.п.

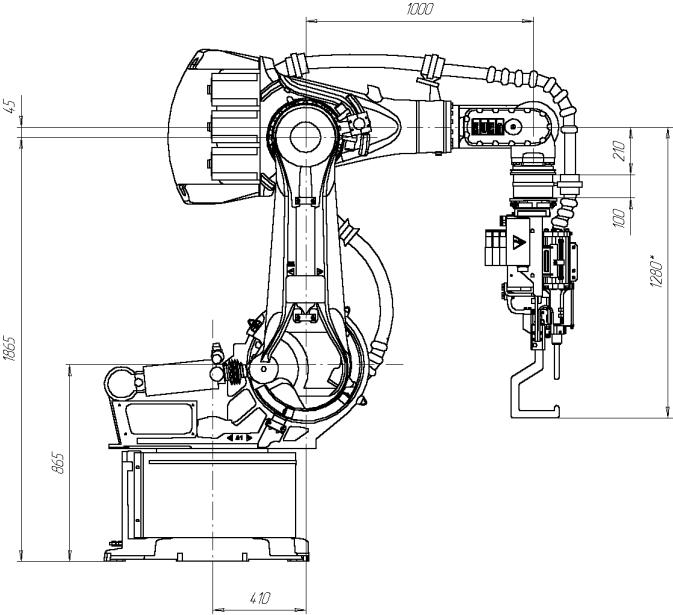
Рисунок 5 – Схема промышленного робота
Основная часть
В основной части мы рассмотрим перспективы ПР, их положительный эффект в широком распространении в промышленной индустрии и популяризацию в будущем.
В настоящее время современная промышленность не обходится без автоматизированных систем и инновационных решений, позволяющих многократно увеличить объемы производства. Расширение применения роботов обусловлено стремлением к повышению производительности и повышению качества выпускаемой продукции. Большинство компаний уже занимаются разработкой и внедрением роботов в сферу логистики, здравоохранения, коммунальных услуг и безопасности.
В связи с последними событиями, а именно пандемией COVID–19, можно заметить, что большинство стран заинтересованы в глобальной автоматизации роботизированной техники во всей сфере жизни человека. Поэтому большинство аналитиков различных компаний в сфере робототехники делают прогнозы:
Популяризация роботов как «услуги»;
Все большее кол–во роботов на производстве;
Рост конкуренции;
Увеличение спроса на рынке работников, в сфере робототехники
Программное обеспечение, основывающееся на облаке;
Дальнейшая разработка коммерческих роботов, подключенных к интеллектуальной сети;
Применение роботов в поставках, складировании и электронной коммерции

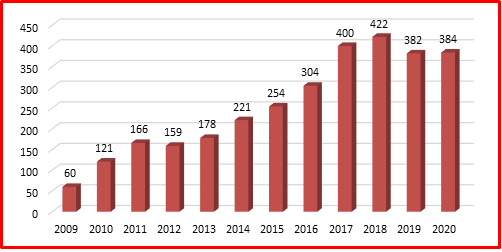
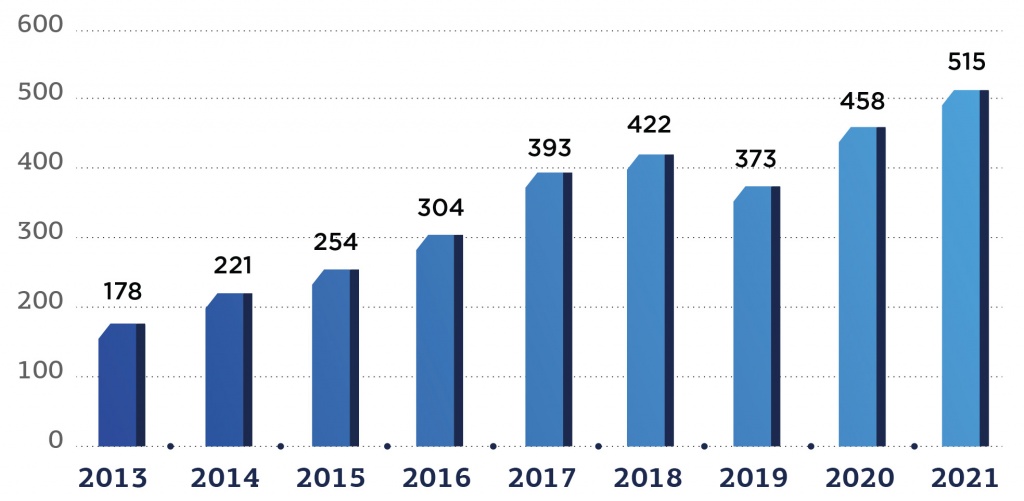
Диаграмма 1 – данные аналитиков IDS по объему продаж ПР в мире
Ключевые технологические тренды промышленной робототехники
Наиболее обширный тренд в рентабельности и эффективности роботизации в промышленности представляют роботы следующих видов:
Коллаборативные роботы (коботы) намного безопасней. Их появление стало возможно благодаря развитию робототехники — компонентной базы (приводов, контроллеров, разнообразных датчиков и проч.), специального ПО. Коботы легко перенастраиваются на выполнение других сценариев и решение новых производственных задач. Это способны выполнять операторы непосредственно на производстве. В числе безусловных плюсов коботов, помимо гибкости и многозадачности, сравнительно низкая цена и, соответственно, небольшой срок окупаемости.
Безопасное взаимодействие с человеком на производстве — очень важное преимущество коботов перед традиционными промышленными роботами. Как говорят эксперты, коллаборативный робот изначально создан так, чтобы он успел остановиться, если в зоне его действия появится человек. Поэтому они и работают медленнее, чем традиционные промышленные, хотя технически способны работать быстрее.
Машинное зрение (его еще называют «техническим») давно используется в робототехнических системах. В частности, применение роботов на конвейерном производстве для перемещения заготовок требует высокой точности их позиционирования. Это не всегда возможно, и тогда на помощь приходит машинное зрение. Цифровая камера получает изображение заготовки в рабочей зоне робота, ПО его анализирует, формулирует перед роботом задачу, и тот ее выполняет. Задачи, которые можно решать при помощи машинного зрения: контроль процесса сборки изделия, подсчет объектов, измерение их параметров и многие другие.
Эксперты подтверждают растущий интерес производственников к данной технологии, появление новых задач, где она может быть использована.
Технологии искусственного интеллекта и машинного обучения
Технология ИИ своевременно может способствовать ускорению производства и сокращению времени на программирование каждого робота по отдельности. Идея ИИ заключается в том, чтобы заставлять роботов выполнять одну и ту же задачу с максимальной точностью и, вдобавок, учиться друг у друга.
Эксперты говорят о тесной взаимосвязи развития роботов и искусственного интеллекта, напоминая при этом, что не каждый управляемый робот обладает элементами ИИ. Если робот лишь выполняет команды оператора, то ИИ здесь отсутствует. А вот когда алгоритмы реализованы на уровне ПО, которое является управляющим элементом робототехнической системы, – вот здесь ИИ присутствует. Такая робототехническая система обладает большей степенью автономности, распознавания изменений окружающей обстановки и вариативности в реакциях на эти изменения.
Конечно, не все ситуации можно спрогнозировать с высокой степенью точности, заложив правильные реакции на уровне программных алгоритмов, и здесь на помощь приходит машинное обучение. Для промышленных роботов искусственный интеллект и машинное обучение получили особое значение в силу появления на производстве коботов, умеющих продуктивно взаимодействовать с человеком. Эксперты уверены в перспективности применения коботов с ИИ на российском производстве, хотя констатируют, что эта рыночная ниша только начинает развиваться, но уже на данном этапе можно с уверенностью сказать, что машинное обучение поможет повысить контроль качества в производственных задачах.
Промышленная роботизация в России и мире
По оценкам недавнего доклада ведущей организации по продвижению, укреплению и защиты индустрии робототехники IFR (International Federation of Robotics) выяснилось, что на момент 2010 года количество ПР составляло 1059 тыс., тогда как в 2020 году показатель вырос в три раза (3015 тыс. ед. промышленных роботов). Данный показатель, как считают аналитики, будет расти, и на момент 2024 года численность ПР в мире достигнет до 774 тыс. ед.
Все это стало следствием двух факторов:
Первый фактор – это возникшая в 2019 году пандемия COVID–19. Локдауны, сокращение торговых связей между странами привело к тому, что большинство мировых держав стало задумываться о глобальной роботизации всех сфер промышленности.
Второй фактор – это высокий спрос, дешевое производство робототехники и сокращение потребности в мировой промышленности в рабочих–людях. По мнению аналитиков, ключевым событием рынка станет сокращение квалифицированных кадров на производстве, что приведет к росту автоматизации и популярности коллаборативных роботов.
Также отмечу крупные проекты и новшества у крупных отечественных государственных и частных компаний в области промышленной роботизации:
OZON, один из крупнейших интернет–магазинов в России, намерен роботизировать обработку заказов;
Компания «Газпром нефть» заключила с ЦНИИ РТК соглашение о сотрудничестве в области разработки робототехники и систем беспилотного управления;
Компания «Северсталь» вложила деньги в фонд Chrysalix RoboVally, который инвестирует в разработку роботов и ИИ;
Холдинг «СИБУР» запустил корпоративный акселератор, в рамках которого ведет поиск проектов в области робототехники;
Национальная ассоциация участников рынка робототехники России (НАУРР) при поддержке Минпромторга объявила о начале работы над стратегией развития робототехники в России;
Консорциум нескольких вузов и крупных компаний–индустриальных партнеров, включая Сбербанк, образовал Национальный центр компетенций по робототехнике и мехатронике на базе Университета Иннополис.
В России, в отличие от развитых и ряда развивающихся стран, производство ПР отсутствует в масштабах, но мы уже можем наглядно видеть на данном этапе, что ближайшая роботизация ожидает и отечественный рынок промышленности.

Рисунок 6 – количество устанавливаемых ПР в мире (тыс.ед)
Плюсы и минусы перспектив по применению промышленных роботов
Для объективности моей работы поговорим о положительных и отрицательных сторонах ПР. Без сомнений можно сказать, что роботы с колоссальным успехом заменяют человека во всем, но все же существует ряд отрицательных качеств в роботизации производства.
Поговорим сначала о плюсах применения роботов в промышленности.
Одна из причин высокого роста развития и применения ПР – это дешевое производство. За прошлое десятилетие цена на производство роботов снизилась на 30–35%, на следующие десятилетие уже прогнозируется снижение на 20–23%. Также можно учесть, что использование ПР может дать возможность ввести на производстве чрезвычайно высокие стандарты точности и скорости.
Роботы успешно заменяют людей не только на крупных предприятиях, но и успешно показывают себя в области малого и среднего бизнеса. В случае изменения курса работы и тут ПР показывают огромный успех, ведь гибкость и универсальность применения такой техники поможет промышленным компаниям переходить из одной сферы в другую без огромных потерь в виде поиска или обучения новых работников.
Подводя итог, в плюсах применения ПР, можно сказать, что роботы куда перспективнее обычного человека. Они дешевле обходятся на производстве, каждый может заменить десятки, а то и сотни рабочих вместе взятых. За большой промежуток времени эксплуатации, роботы не только окупают себя, но также и увеличивают выработки во множество раз.
Теперь перейдем к минусам применения ПР в производстве.
Самый главный минус в применении роботов – это необходимость в построении четкой запрограммированной структуры и зависимость от нее. Качество и эффективность роботов зависит только от того, на сколько точно получится запрограммировать машину. От небольшой пропущенной строчки в коде программы может произойти компьютерный сбой, в лучшем случае, одной машины, в худшем, остановить целое производство на всем предприятии, или дать лазейку для взлома производства, что может навредить не только компании, но и государству.
Плавно можно перейти к еще одной глобальной проблеме – это сложность в управлении в непредвиденных ситуациях. Если произойдет ситуация в виде перепада напряжения, механическая поломка одного из роботов или заражение компьютерной сети вирусом, то возобновить и наладить производственный процесс будет сложнее. Ведь если вышли из строя автоматы, которые нельзя починить или заменить на месте, то придётся останавливать всё производство или задействовать ручной труд.
Невозможность применения роботов в творчестве. Несмотря на достижения нейросетей в изобразительном искусстве и музыке, всё же на производстве они ещё не готовы появиться. Пока ещё не создали роботов и программы для них, которые смогли бы самостоятельно разработать деталь, автомобиль или, например, самолёт
Риск развития технологической безработицы. Замена людей на роботов является одним из страхов широких рабочих масс и людей, протестующих против искусственного интеллекта. Замена сборщиков, фасовщиков и грузчиков на складах и других низкоквалифицированных работников, может лишить рынок труда спроса на многие профессии, требующие физического труда.
Подводя итог, из всего перечисленного можно сказать, что ПР имеют весомые плюсы, такие как: дешевое производство, освобождение человека от рутинных, трудоемких процессов, применение высоких стандартов качества, при этом с минимальным количеством ошибок. Все это позволяет сократить время и издержки производства в промышленности, что позволит компаниям задать новые ориентиры в производстве.
При этом нельзя сказать, что автоматизация не лишена недостатков. Человек, в отличие от машины, способен к коммуникации и решению любой ситуации в непредвиденных случаях. Людей трудно перевести с одного производственного процесса на другой, если те не похожи. При этом роботизация требует построения чётких систем и создания программ, по которым автоматы будут работать.
Однако все перечисленные мною недостатки лишь вопрос времени, и я могу с уверенностью сказать, что отрасль роботостроения – это новый шаг в светлое будущее человечества.
Заключение
Роботы стали незаменимой рабочей силой во всем мире. Ни одна промышленная структура не может обойтись без роботов. Уже с конца 20–го века ПР стали активно помогать человеку в работе, а сегодня с легкостью превосходят и заменяют его.
Что ждет нас в будущем, если робот полностью заменит человека в производстве, покажет время. Но я могу с точностью сказать, что 21–ое столетие определенно запишут в историю как век полной роботизации и автоматизации производства.
Библиографический список.
https://plusiminusi.ru/plyusy–i–minusy–robotizacii–proizvodstva/ – Плюсы и минусы применения промышленных роботов в производстве.
https://top3dshop.ru/blog/industrial–robots–apply–and–prospects.html#perspektivy–primeneniya – промышленные роботы на производстве.
https://powercoup.by/novyie–tehnologii/promyishlennyie–robotyi – Промышленные роботы в современном производстве.
https://ru.wikipedia.org/wiki/Промышленный_робот#Появление_роботизированного_производства – краткое содержание, что такое ПР и история создания.
https://роботека.рф/industrial – Развитие и различные виды промышленных роботов.
https://www.tadviser.ru/index.php/Статья:Технологические_тенденции_развития_промышленных_роботов – Тренды развития роботов в производстве.
https://www.robowizard.ru/blog/kak–ustroeny–promyshlennye–roboty#chto–nuzhno – краткий гид как устроен промышленный робот.
https://helpiks.org/8–71401.html – структура и устройство промышленных роботов. |
 Скачать 1.18 Mb.
Скачать 1.18 Mb.