Реферат геоинформационные системы 7 вариант. Реферат ГИС_Яровенко.Н.В _7-вариант. Реферат вариант 7 по дисциплине Геоинформационные системы (гис) Исполнитель
 Скачать 0.97 Mb. Скачать 0.97 Mb.
|

|
Министерство образования и науки Российской Федерации Федеральное государственное автономное образовательное учреждение высшего образования «Национальный исследовательский Томский политехнический Университет»  Инженерная школа природных ресурсов 21.05.02 «Прикладная геология» РЕФЕРАТ Вариант – 7 по дисциплине: Геоинформационные системы (ГИС)
Томск – 2022 ОГЛАВЛЕНИЕ1ВВЕДЕНИЕ 4 2КАРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ 5 2.1Системы координат 6 3МОДЕЛИ ПРЕДСТАВЛЕНИЯ ПРОСТРАНСТВЕННЫХ ДАННЫХ 11 3.1Растровые модели данных 11 3.1.1Характеристики растровых моделей 13 3.2Векторные модели данных 15 3.3Грид представление 16 3.4TIN представление 17 3.5Формы представления поверхностей 18 4ПОЛУЧЕНИЕ КАРТ ПО ДАННЫМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ 19 5ПРАВИЛА ГЕНЕРАЦИИ ОТНОШЕНИЙ 25 6ЗАКЛЮЧНИЕ 27 7СПИСОК ЛИТЕРАТУРЫ 28 Вопросы к варианту №7 Картографические проекции. Их классификации. Модели представления пространственных данных. Получение карт по данным дистанционного зондирования. Правила генерации отношений. ВВЕДЕНИЕГеографическая информационная система (ГИС, geographic(al) information system, GIS) – это информационная система, обеспечивающая сбор, хранение, обработку, доступ, визуализацию и распространение пространственно координированных данных (пространственных данных). ГИС содержит данные о пространственных объектах в форме их цифровых представлений. ГИС поддерживается программным, аппаратным, информационным, нормативно-правовым, кадровым и организационным обеспечением. С точки зрения теории информационных систем ГИС – это большой класс информационных систем, позволяющих работать с пространственными данными. В отличие от автоматизированных систем управления в ГИС появляется множество новых технологий пространственного анализа данных. В силу этого ГИС служат мощным средством преобразования и синтеза разнообразных данных для задач управления. Как системы, использующие базы данных, ГИС характеризуются широким набором данных, собираемых с помощью разных методов и технологий. В связи с большим значением экспертных задач, решаемых при помощи ГИС, возрастает роль экспертных систем, входящих в состав ГИС. Как системы моделирования, ГИС используют максимальное количество методов и процессов моделирования, применяемых в других автоматизированных системах. В ходе работы мы определим главные составные части ГИС, картографические проекции, модели представления пространственных данных, их классификации и их предназначение и использование, а также получение карт по данным дистанционного зондирования и правила генерации отношений. КАРТОГРАФИЧЕСКИЕ ПРОЕКЦИИПространственные данные в геоинформационных системах отображаются с помощью различных картографических проекций, которые предназначены для представления с приемлемой точностью сферической поверхности Земли на плоском носителе. В буквальном смысле, процесс создания проекции представляется как помещение источника света внутри прозрачного глобуса, на котором размещаются непрозрачные земные объекты, и проецирование их контуров на двухмерную поверхность, окружающую глобус. Возможны разные виды проецирования при окружении глобуса цилиндром, конусом и даже помещении возле него плоского листа бумаги. Каждый из этих методов создает свое семейство проекций. Поэтому существуют семейство планарных проекций, семейство цилиндрических проекций и семейство конических проекций (рис. 1). Существует еще четвертое семейство проекций, называемых азимутальными. Они основаны на идее проецирования параллельными лучами света на плоскую поверхность. Проекция - не абсолютно точное представление географического пространства. Каждая проекция создает свой набор типов и величин искажений на карте. Важные характеристики карт, которые должны сохраняться для точных аналитических операций, часто определяют выбор той или иной проекции. Эти характеристики включают углы (или формы), расстояния, направления, площади объектов. Проекция - не абсолютно точное представление географического пространства. Каждая проекция создает свой набор типов и величин искажений на карте. Важные характеристики карт, которые должны сохраняться для точных аналитических операций, часто определяют выбор той или иной проекции. Эти характеристики включают углы (или формы), расстояния, направления, площади объектов. Более подробную информацию по картографическим проекциям можно найти в любом учебнике по геодезии и картографии.  Рисунок 1 Три семейства картографических проекций. А- планарные, Б- цилиндрические, В- конические проекции. Системы координатСистема координат необходима для определения расстояний и направлений на земле. Географическая система координат, использующая широту и долготу, хороша для определения положений объектов, расположенных на сферической поверхности Земли (рис. 2). 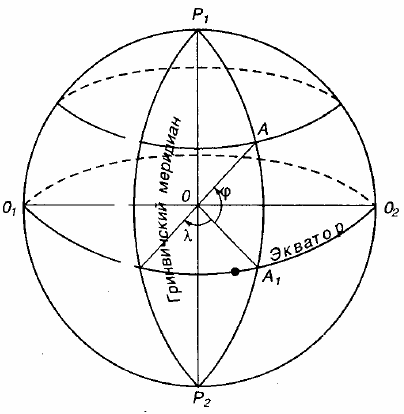 Рисунок 2 Система географических координат. ОА – отвесная линия, φ и λ – географические широта и долгота точки А. Географическая широта точки – угол между отвесной линией, 30 проходящей через эту точку, и плоскость экватора. Географическая долгота точки – двугранный угол между плоскостью начального (Гринвичского) меридиана и плоскостью меридиана данной точки. Поскольку чаще всего мы имеем дело с двухмерными картами, спроецированными с глобуса, нам потребуется одна или несколько систем координат, соответствующих различным проекциям. Такие системы координат на плоскости называются картографическими прямоугольными системами координат, они позволяют точно указывать положение объектов на плоских картах. Классической системой прямоугольных координат является Декартова система координат. Она состоит из двух линий - абсциссы и координаты. Абсцисса - горизонтальная линия, содержащая равномерно распределенные числа начиная с 0, называемого началом координат, и продолжающаяся так далеко в двух направлениях, насколько это нам нужно для измерения расстояний (рис. 3). Вторая линия, ордината, обеспечивает нам движение по вертикали от той же начальной точки в положительном или отрицательном направлении. Вместе они позволяют нам определять местоположение любой точки или объекта указанием величин X и Y. 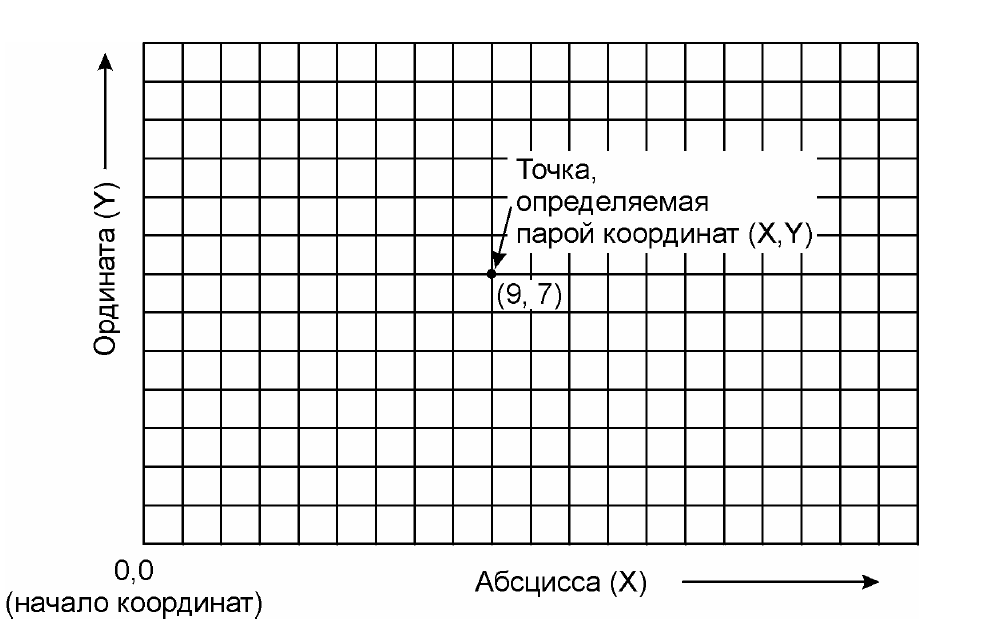 Рисунок 3 Декартова система координат. Декартова система координат обычно применяется при составлении крупномасштабных карт. В России при производстве геологоразведочных работ используется проекция Гаусса-Крюгера. В 1820 - 1830 гг. К.Ф. Гаусс разработал "двойную" равноугольную проекцию, сохраняющую длины на среднем меридиане. Л. Крюгер в 31 1912 и 1919 гг. предложил способ непосредственного отображения референц-эллипсоида взамен определения, указанного двойной проекцией, и эту проекцию стали называть проекцией Гаусса-Крюгера. В проекции Гаусса-Крюгера поверхность референц-эллипсоида на плоскости отображается по меридианным зонам, ширина которых равна 6° (для карт масштабов 1:500000 -1:10000) или 3° (для карт масштабов 1:5000 -1:2000) (рис. 4). 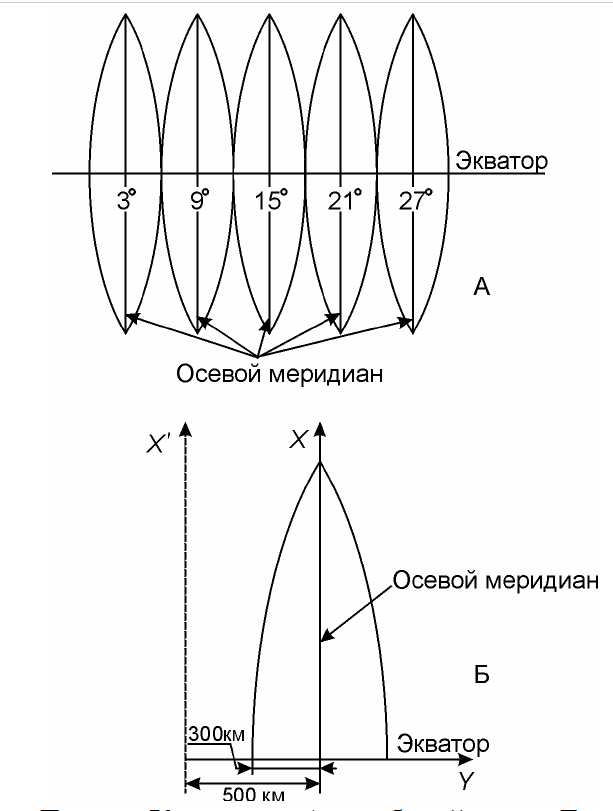 Рисунок 4 Проекция Гаусса-Крюгера: A - общий вид; Б - система координат Меридианы и параллели изображаются кривыми, симметричными относительно осевого меридиана зоны и экватора, однако их кривизна настолько мала, что западная и восточная рамки карты показаны прямыми линиями. Параллели, совпадающие с северной и южной рамками карт, изображаются прямыми на картах крупных масштабов (1:2000 - 1:50000), на картах мелких масштабов - кривыми. Начало прямоугольных координат каждой зоны находится в точке пересечения осевого меридиана зоны с экватором. В России принята нумерация зон, отличающаяся от нумерации колонн карты масштаба 1:1000000 на тридцать единиц, т. е. крайняя западная зона с долготой осевого меридиана 1=21° имеет номер 4, к востоку номера зон возрастают. Номер зоны N и долгота осевого. меридиана L° в градусах связаны между собой равенством L° = 6N-3. Территория России находится в северном полушарии, поэтому координаты X всех точек имеют положительное значение. Координаты Y имеют отрицательные значения левее осевого меридиана и положительные правее его (рис. 4А). Чтобы исключить из обращения отрицательные координаты и облегчить пользование прямоугольными координатами на топографических картах, ко всем координатам Y добавляют постоянное число 500000 м (рис. 4Б). Осевые меридианы трехградусных зон совпадают попеременно то с осевыми меридианами шестиградусных зон, то с крайними меридианами этих зон. За рубежом наиболее широко распространенной в ГИС системой координат является универсальная поперечная Меркатора (Universal Transverse Mercator - UTM) (рис. 22). Она используется в большинстве работ с дистанционным зондированием, подготовке топографических карт, построении баз данных природных ресурсов, так как она обеспечивает точные измерения в метрической системе, принятой в большинстве стран и научным сообществом в целом. В ней основной единицей измерения длины является метр.  Рисунок 5 Универсальная поперечная координатная система Меркатора (UTM). UTM очень похожа на проекцию Гаусса-Крюгера и делит земную поверхность на 60 пронумерованных вертикальных зон шириной по шесть градусов долготы, каждая из которых проходит от 80-го градуса южной широты до 84-го градуса северной широты. Чтобы все координаты были положительными, в UTM есть два начала ординат: одно - на экваторе (для северного полушария), другое - на 80-й 33 параллели южной широты (используется для южного полушария). Эти зоны пронумерованы начиная от 180-градусного меридиана в восточном направлении. Земная поверхность делится также на ряды по 8 градусов широты каждый, за исключением самого северного, который составляет 12 градусов, позволяя тем самым покрыть всю область северного полушария. Каждая секция, образованная пересечением зоны и ряда, обозначается комбинацией числа и буквы. Как следует из названия, UTM использует поперечную проекцию Меркатора. Для каждой из 60-ти зон по долготе применяется отдельная реализация проекции с целью уменьшения искажений. Начало координат помещается в центре каждой зоны, на пересечении центрального меридиана зоны с экватором, причем нулевое значение по абсциссе смещено от него на 3 градуса к западу. Программные средства ГИС содержат специальные блоки преобразования, отображения и трансформации картографических проекций. На практике использование модулей трансформации проекций может быть осложнено отсутствием параметров проекции карты- источника. МОДЕЛИ ПРЕДСТАВЛЕНИЯ ПРОСТРАНСТВЕННЫХ ДАННЫХПри описании в ГИС пространственные объекты разделяются на множество элементарных объектов-примитивов. К ним относят: точки, линии, контуры, поверхности, ячейки регулярных и нерегулярных пространственных сетей и элементы разрешения изображения (пикселы). Первые четыре примитива связаны с векторным способом представления пространственных данных путем указания координат объектов и составляющих их частей. Остальные примитивы связаны с их растровым способом представления в виде совокупности ячеек, на которые разбиваются объекты. Представление пространственных данных или модель пространственных данных – это способ цифрового описания пространственных объектов, тип структуры пространственных данных. Наиболее универсальными и употребительными из моделей пространственных данных являются: Растровое представление; Векторное представление; GRID представление; TIN представление. Существуют и другие модели пространственных данных, которые встречаются значительно реже и, по этому их описание не приводится. Растровые модели данныхРастровая модель данных - это цифровое представление пространственных объектов в виде совокупности ячеек растра (пикселов) с присвоенными им значениями класса объектов. Растровое представление предполагает позиционирование объектов указанием их положения в соответствующей растру прямоугольной матрице единообразно для всех типов пространственных объектов. Растровые ГИС появились раньше векторных – конец 60-х годов и продолжают повсеместно использоваться до настоящего времени (например – IDRISI (лаборатория Кларка США)). Основное преимущество растровой модели - это слияние позиционной и смысловой информации в единой позиционной матрице, положение элементов (пикселов) которой определяется номером их столбца и строки, а значение элемента – непосредственный показатель смысловой нагрузки. С каждым смысловым значением элемента может быть связан неограниченный по длине набор трибутов. При необходимости координаты каждого пространственного объекта, отображенного набором пикселов, могут быть вычислены. На рисунке 6 приведен пример формирования растровой модели. В растровых моделях дискретизация осуществляется наиболее простым способом – весь объект отображается в пространственные ячейки, образующие регулярную сеть. При этом каждой ячейке растровой модели соответствует одинаковый по размерам, но разный по характеристикам (цвет, плотность) участок поверхности объекта. В ячейке модели содержится одно значение, усредняющее характеристику участка поверхности объекта.  Рисунок 6 Пример формирования растровой модели. А-фрагмент реального мира, Б- растровая модель. Для растровых моделей существует ряд характеристик: разрешение, значение, ориентация, зона, положение. Разрешение – минимальный линейный размер наименьшего участка пространства (поверхности), отображаемый одним пикселом. Пикселы обычно представляют собой прямоугольники или квадраты, реже используются шестиугольники или треугольники. Более высоким разрешением обладает растр с меньшим размером ячеек. Высокое разрешение подразумевает обилие деталей, множество ячеек, минимальный размер ячеек. Ориентация – угол между направлением на север и положением колонок растра. Положение обычно задается упорядоченной парой координат (номер строки и номер столбца), которые однозначно определяют положение каждого элемента отображаемого пространства в растре. Таким образом, зная разрешение, ориентацию и положение можно без труда вычислить положение любого элемента растра в пространстве. Значение – элемент информации, хранящийся в элементе растра. Поскольку при обработке применяются типизированные данные, то есть необходимость определить типы значений растровой модели. Ими могут быть целые и десятичные числа, буквенные значения. При этом обязательно составляется легенда или таблица кодов значений. Например, возможна следующая легенда (для магматических горных пород): 0- кислые, 1- средние, 2- основные, 3- ультраосновные горные породы. Зона – соседствующие друг с другом ячейки, имеющие одинаковые значения. Зоной могут быть отдельные объекты, геологические тела, элементы гидрографии и т.п. Для указания всех зон с одним и тем же значением используют понятие класс зон. Естественно, что не во всех слоях изображения могут присутствовать зоны. Основные характеристики зоны – ее значение и положение. Буферная зона – зона, границы которой удалены на известное расстояние от любого объекта на карте. Обычно буферные зоны различной ширины могут быть созданы вокруг выбранных объектов на базе таблиц сопряженных характеристик. Точность в растровых форматах, в большинстве случаев, определяется ½ ширины и высоты пиксела, т.к. не ясно к какой части растра следует относить координаты какого-либо объекта. Растровые модели имеют следующие достоинства: - модель очень проста. Данные собираются с равномерно расположенной сети точек; - растровые данные проще для обработки (матричная алгебра хорошо поддаётся программированию); - многие растровые геоинформационные системы позволяют вводить векторные данные, тогда как обратная процедура значительно сложнее; - процессы растеризации (получения растрового изображения по векторному) много проще алгоритмически, чем процессы векторизации, которые зачастую требуют применения экспертных решений. Наиболее часто растровые модели применяются при представлении и обработке аэро- и космофотоснимков и для получения данных дистанционного зондирования Земли. Существенным недостатком растровых моделей следует считать использование большего объема памяти компьютера для хранения данных и для их обработки. Например, снимок искусственного спутника Земли Landsat имеет 74000000 элементов растра. Проблема частично решается путем хранения не полного (целого) растрового фрагмента, а его сжатой копии (архива). Методы сжатия растровых данных работают внутри подсистемы хранения и редактирования ГИС, но они могут вызываться и напрямую на этапе ввода информации в ГИС. Первый метод сжатия растровых данных называется групповым кодированием. Когда-то растровые данные вводились в ГИС с помощью пронумерованной прозрачной сетки, которая накладывалась на кодируемую карту. Каждая ячейка имела численное значение, соответствующее данным карты, которые вводились (обычно с клавиатуры) в компьютер. Например, для карты размером 200 на 200 ячеек потребуется ввести 40000 чисел. В каждой строке существуют длинные цепочки одинаковых чисел. Для экономии места при записи на диск, в строку последовательно вводят значение атрибута и номер конечного столбца группы с одинаковыми атрибутами (рис. 7). В этом и состоит идея метода группового кодирования. Описанный выше метод действует только в пределах одной строки растра. 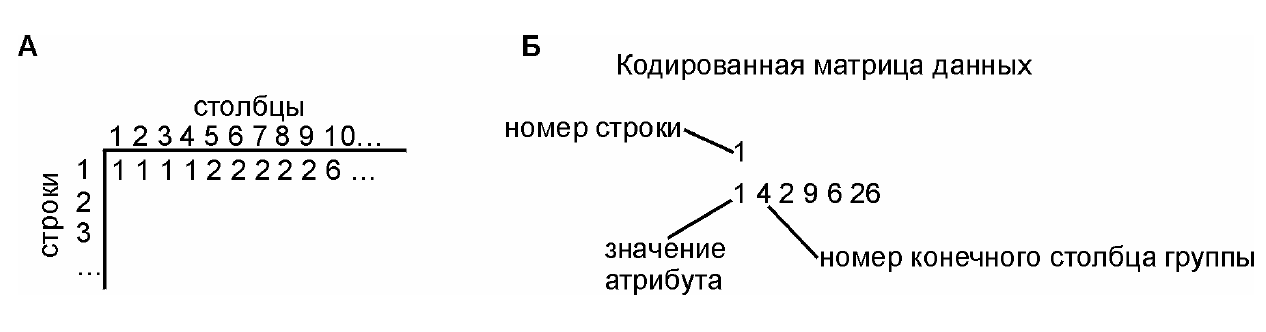 Рисунок 7 Групповое кодирование. А – исходная матрица данных; Б – кодированная матрица данных. Векторные модели данныхВекторные модели исторически связаны с устройствами цифрования карт (векторными устройствами ввода) – цифрователями (дигитайзерами) с ручным обводом объектов. При этом генерируется поток пар плановых координат при движении курсора по планшету. Следует сразу отметить, что векторное представление пространственных объектов занимают в памяти ЭВМ значительно меньше места, чем растровые. Векторное представление или векторная модель данных – это цифровое представление точечных, линейных и полигональных объектов в виде набора координатных пар. Различают 2 основные векторные модели пространственных данных – это нетопологическое и топологическое представления. Нетопологическое векторное представление – это векторное представление пространственных объектов в виде набора координатных пар с описанием только геометрии точечных, линейных и полигональных объектов. Топологическое векторное представление – это векторное представление пространственных объектов, учитывающие не только геометрию объектов, но и их топологические отношения. Грид представлениеРанее мы рассматривали модели для следующих трех типов пространственных объектов: точки, линии и полигоны. Все эти три типа являются плоскими или планиметрическими объектами. Далее будем рассматривать поверхности (рельефы), которые являются трехмерными 23 или, как говорят 3D – объектами. Примерами поверхностей служат рельеф местности, геофизические поля (магнитные, электрические поля Земли) и т.д. Все эти поверхности иногда называют общим термином – географические поля или геополя. Поверхность или рельеф – трехмерный объект (3D) определяемый не только плановыми координатами x, y, но и аппликатой z, т.е. тройкой координат. Данные для создания цифровых моделей поверхностей получают путем точечных наземных измерений, дистанционного зондирования Земли различными методами и т.д. Создание непрерывных поверхностей из точечно полученных исходных данных возможно, если исходные данные имеют следующие формы: – регулярное положение точек наблюдения на прямоугольных сетках – с полурегулярным положением точек, расположенных на профилях или изолиниях (рис. 9Б); – со случайным расположением точек наблюдения. Наиболее популярный способ регулярного задания цифровых моделей поверхностей – это представление значений полей на регулярной сетке прямоугольников, когда в ее узлах заданы значения показателя. На английском языке регулярная сетка прямоугольников называется GRID, поэтому этот и способ представления рельефов называют гридом. Регулярная сетка – это цифровая модель поверхности, в основу которой положена сеть точек, каждой из которых сопоставлено значение уровня поля в этой точке, причем точки расположены в определенной регулярной форме и задан способ вычисления значений уровней между узлами сетки. На практике используют регулярные сетки с квадратной или прямоугольной ячейками. Это обусловлено относительной простотой математического аппарата для оперирования такими данными 24 Например, для описания геометрии регулярной сетки с квадратными ячейками (рис. 10) необходимо определить: x0 – начальное значение X-координаты сетки, y0 – начальное значение Y-координаты сетки, sx – число узлов по оси X (ширина), sy – число узлов по оси Y (высота), d – расстояние между узлами. TIN представлениеTIN представление (от английского triangulated irregular network, TIN – триангуляционная нерегулярная сеть) - векторный способ отображения поверхностей (рис. 13). Триангуляция – это процесс создания смежных непересекающихся треугольников, вершинами которых являются точки. Наиболее часто используется триангуляция по критерию Делоне (рис. 14): окружность, проведенная через три вершины любого 26 треугольника не должна содержать в себе никаких других точек.  Рисунок 8 TIN представление. Векторное представление поверхностей образуется соединением точек с известными значениями высоты. А- план; Б- 3D отображение Формы представления поверхностейЦифровая модель поверхности подразумевает, что для каждой точки внутри области определения поверхности можно однозначно определить значение уровня в этой точке. Следует различать цифровые модели поверхностей и формы их представления. В отличие от цифровых моделей, формы представления поверхностей ориентированы на визуальное представление. Основным и традиционным методом представления поверхностей является способ изолиний. Изолинии – это линии уровня, представляющие собой горизонтальные сечения поверхности. Сечения могут проводятся как с равным шагом, так и с произвольным. В ГИС для описания изолиний используются линейные регулярных сеток. примитивы - линии. Каждой такой линии в качестве атрибута ставится значение изолинии. ПОЛУЧЕНИЕ КАРТ ПО ДАННЫМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯДанные дистанционного зондирования традиционно используютсяв геологической отрасли для получения различной информации. Использование данных дистанционного зондирования (ДДЗ) - аэро- и космоснимков - для целей картирования является безусловно перспективным направлением. Материалы съемок могут быть представлены в виде фотографических снимков или набора растровых изображений, привязанных к нужной координатной системе. В связи с различными способами представления ДДЗ существуют разные технологические схемы их подготовки и обработки. Традиционно при геолого-съемочных работах используются космо- и аэрофотоснимки различных масштабов – от 1:330000 до1:15000. При выполнении геолого-съемочных работ используется топографическая основа масштаба от 1:25000 до 1:200000. Обычно дешифрирование материалов дистанционных методов исследования проводится в тех же масштабах, что и снимки. Далее поводится перенос выявленных структур на топографическую основу. При этом обычно появляются ошибки, которые возникают при переходе от масштаба к масштабу, да и точность фотографических материалов в различных частях снимка различна. Последнее обусловливается ошибками оптической системой съемочной камеры. Традиционно, инструментальные ошибки фотографических снимков частично снимаются путем составления фотопланов из отдельных частей различных снимков. Квалифицированное использование геоинформационных систем позволяет исключить инструментальные ошибки и ошибки перехода от масштаба к масштабу. Технологическая схема применения инструментария ГИС для дешифрирования космо- и аэрофотоснимков выглядит следующим образом: 1. Сканирование фотоснимка; 2. Регистрация полученного растрового изображения; 3. Трансформация растрового изображения; 4. 3D моделирование рельефа местности с драпировкойтрансформированным снимком; 5. Дешифрирование снимка; 6. Заверка результатов дешифрирования на местности. Сканирование фотоснимков осуществляется с целью получения растрового представления площади снимка. Сканирование целесообразно осуществлять с разрешением не менее 300 dpi с глубиной цвета 8 бит на пиксел (рис. 9). Регистрация полученного растрового изображения проводится сцелью пространственной привязки растра. Регистрация заключается в задании пикселам растрового изображения реальных координат. Для регистрации теоретически достаточно задать координаты трем пикселам. Однако на практике трех точек привязки оказывается недостаточно. Целесообразно точки-привязки изображения размещать равномерно по всей площади снимка (рис. 41). Трансформация растрового изображения осуществляется с целью исключения инструментальной ошибки съемочной камеры и отклонения камеры от вертикали при съемке. В зависимости от исходных фотоматериалов можно рекомендовать различные методы трансформации - это прежде всего аффинные и различные проективные трансформации. Аффинные трансформации обычно применяют к аэрофотоснимкам. Проективные (полиномиальные 1 и 2 степеней) трансформации наиболее удачно подходят к трансформации космических снимков (рис. 10). 3D моделирование рельефа с драпировкой снимком может бытьвыполнено при наличии цифровой модели рельефа местности.Цифровая модель местности может быть рассчитана по горизонталямрельефа в форме TINа или GRIDа. Полученная модель совмещается странсформированным снимком и представляется в трехмерном виде.Особенность такого моделирования заключается в том, что приотображении можно произвольным образом менять масштаб по Z координате, тем самым подчеркивая или скрывая те или иные элементына поверхности земли (рис. 11).   Рисунок 9 Сканированный космофотоснимок  Рисунок 10 Фрагмент с точками привязки и таблица привязки. Дешифрирование снимка можно проводить непосредственно в ГИС. При этом может быть использована различная вспомогательная66информация с пространственной привязкой. Полученные в результате моделирования и дешифрирования линеаменты должны быть обязательно заверены на местности. В настоящее время при геолого-съемочных и поисковых работах все шире стали применяться цифровые спектрозональные снимки с искусственных спутников Земли. При этом, качество и разрешающая способность, количество спектральных  Рисунок 11 3d модель привязанной местности диапазонов различны у различных систем. Процесс анализа таких спектрозональных снимков включает: обучение на эталонных участках, в процессе которого формируется признаковое пространство и описываются образы изучаемых природных объектов в терминах выбранных признаков, и последующее распространение данных обучения на всю исследуемую территорию для выделения природных объектов, их классификации, ранжирования. Традиционно процесс обработки спектрозональных снимков проводится в несколько этапов: 1. Составление модели исследуемых природных объектов ипроцессов; 2. Формирование массива данных; 3. Предварительная обработка данных; 4. Обработка эталонных участков; 5. Обработка всей территории; 6.Заверочные работы. Составление модели исследуемых природных объектов и процессов. На этом этапе формируются представления о районе исследований, основных характеристиках и свойствах изучаемых природных объектов и процессов. Все это дает возможность оптимальным образом решить вопрос подбора материалов дистанционного зондирования, необходимых для решения поставленной задачи. Этот этап предусматривает анализ результатов исследований, проведенных в этой области ранее, сбор дополнительного картографического и фактографического материала, более полно описывающего исследуемый природный объект. На основе полученной модели в дальнейшем будет проводиться экспертная оценка результатов обработки изображения. Формирование массива данных. На этом этапе проводится анализ обеспеченности территории материалами дистанционного зондирования. С учетом разработанной модели производится выбор космоснимков. В зависимости от типа космического аппарата и съемочной системы они могут различаться по масштабу, обзорности, спектральным характеристикам и геометрическому разрешению на местности. Наиболее важным является правильный выбор масштабного и спектрального ряда космических снимков для получения максимально полной информации об исследуемом природном явлении. После приобретения выбранного набора снимков на изучаемую территорию, производится предварительная обработка полученных материалов. Целью предварительных преобразований является: 1. Улучшение восприятия изучаемых объектов и свойственных импризнаков для качественной визуальной обработки; 2. Получение цифровых характеристик изучаемых объектов и их признаков для дальнейшего комплексного анализа; 3. Усиление контраста изображений или отдельных их элементов, проработка мелких дискретных деталей изучаемых объектов; 4. Уменьшение влияния аппаратных и атмосферных помех. Комплекс преобразований для улучшения исходных изображений включает фотометрическую и геометрическую коррекцию, фильтрацию и др. процедуры. Очень важным является этап обработки эталонных участков. Эталонные участки выбираются на хорошо изученных площадях, обладающих типовыми характеристиками с точки зрения полученной ранее модели. Для обработки могут использоваться не только снимки в узких спектральных диапазонах, но и синтезированные изображения, полученные в процессе дополнительной цифровой обработки исходных снимков. На этом этапе происходит формирование признакового пространства, с помощью которого в дальнейшем будет проводится анализ всей исследуемой территории. Образы изучаемых природных объектов описываются в терминах выбранных признаков. Далее проводится анализ взаимоотношений объектов исследований с внешней средой, а также предварительная оценка изменчивости признакового пространства по всей исследуемой территории. При обработке всей территории проводится распространение выявленных признаков на основной массив данных. В процессе обработки фиксируются изменения признакового пространства, выявляемые с помощью эталонных объектов, с целью проведения окончательного районирования территории по степени изменчивости признаков. В итоге по результатам проведенного анализа проводится опознавание и классификация исследуемых природных объектов и явлений, обобщение, ранжирование выделенных структур. На последнем этапе полученные данные обязательно заверяются на местности либо по регулярной сети заверочных точек, либо по случайной. По результатам заверочных работ проводится коррекция алгоритмов обработки спектрозональных снимков. ПРАВИЛА ГЕНЕРАЦИИ ОТНОШЕНИЙНа основании диаграммы ER-типа и используя правила генерации, определим набор отношений и их атрибутов Основные 6 правил генерации отношений: Правило 1. Если показатель кардинальности бинарной связи равен 1 : 1 и класс принадлежностей обеих сущностей является обязательным, то требуется только одно отношение. Первичным ключом этого отношения может быть ключ любой из двух сущностей. Правило 2. Если показатель кардинальности бинарной связи равен 1 : 1 и класс принадлежности одной сущности является обязательным, а другой ‑ необязательным, то необходимо построение двух отношений. Под каждую сущность нужно выделение одного отношения, при этом ключ сущности должен служить первичным ключом для соответствующего отношения. Кроме того, ключ сущности, для которой класс принадлежности является необязательным, добавляется в качестве атрибута в отношение, выделенное для сущности с обязательным классом принадлежности. Правило 3. Если показатель кардинальности бинарной связи равен 1 : 1 и класс принадлежности ни одной сущности не является обязательным, то необходимо использовать три отношения: по одному для каждой сущности, ключи которых служат в качестве первичных в соответствующих отношениях, и одно отношение для связи. Среди своих атрибутов отношение выделяемой связи будет иметь по одному ключу каждой сущности. Правило 4.Если показатель кардинальности бинарной связи равен 1 : n и класс принадлежности n-связной сущности является обязательным, то достаточным является использование двух отношений, по одному на каждую сущность, при условии, что ключ каждой сущности служит в качестве первичного ключа для соответствующего отношения. Дополнительно ключ 1-связной сущности должен быть добавлен как атрибут в отношение, отводимое для n-связной сущности. Правило 5. Если показатель кардинальности бинарной связи равен 1 : n и класс принадлежности n-связной сущности является необязательным, то необходимо формирование трех отношений: по одному для каждой сущности, причем ключ каждой сущности служит первичным ключом соответствующего отношения, и одного отношения для связи. Связь должна иметь среди своих атрибутов ключ каждой сущности. Правило 6. Если показатель кардинальности бинарной связи равен m : n, то для хранения данных необходимо три отношения: по одному для каждой сущности, причем ключ каждой сущности используется в качестве первичного ключа соответствующего отношения, и одно отношение для связи. Последнее отношение должно иметь в числе своих атрибутов ключ каждой сущности. ЗАКЛЮЧНИЕВ данный момент ГИС системы являются одними из самых быстро развивающихся и интересных в плане коммерциализаций, с их удобным пользовательским интерфейсом и огромным количеством содержавшейся в них информации делают их незаменимыми при всё ускоряющемся мире. Рынок ГИС, начиная с момента появления первых коммерческих продуктов во второй половине прошлого века, постоянно развивается и растет. Растет оборот как непосредственных разработчиков базового программного ГИС обеспечения, так и их партнеров, предлагающих готовые наборы геоданных и собственные разработки, дополняющие возможности базовых продуктов полезными, в том числе специализированными функциями и инструментами. Рынок ГИС растет и в периоды экономического подъема, и даже в трудные времена. Эта технология очень ценна для улучшения производственного процесса, при принятии решений, для общения и налаживания контактов между людьми, повышения их знания об окружающем мире, для общего повышения эффективности работы и расширения взаимодействия внутри и между организациями. В процессе написания реферата мы ознакомились с вышеописанными направлениями ГИС. Данный реферат может быть полезен для студентов различных специальностей, которые используют различные географические карты в процессе обучения. СПИСОК ЛИТЕРАТУРЫТрифонова Т.А., Мищенко Н.В., Краснощеков А.Н. Геоинформационные системы и дистанционное зондирование в экологических исследованиях: Учебное пособие для вузов. – М.: Академический проект, 2005. 352 с Геоинформатика. Толковый словарь основных терминов // Ю.Б. Баранов, А.М. Берлянт, Е.Г. Капралов и др. — М.: ГИС-Ассоциация, 1999. ДеМерс М. Н. Географические информационные системы. Основы. Пер. с англ. - М.: Дата+, 1999. - 490с. Замай С.С, Якубайлик О.Э Програмное обнмпечение и технологий геоинформаионных систем: Учеб. Пособие / Краснояр. гос. ун-т. Красноярск 1998, 110с. Королев Ю.К. Общая геоинформатика. ч.I. Теоретическая геоинформатика. М.: Дата+, 1998. http://kyrator.com.ua/ | ||||||||||||||||||||||||||||||||||||