АСУТП_Пс_651(после нормоконтроля). Структура комплекса технических средств
 Скачать 3.81 Mb. Скачать 3.81 Mb.
|

3.6 Система автоматического регулирования и дистанционного управленияПодсистемы дистанционного и автоматического управления осуществляют дискретное воздействие на электрифицированные приводы механизмов и запорно-регулирующей арматуры, которые расположены в различных, иногда значительно территориально удаленных, участках энергоблока. Это воздействие может быть дистанционным с поста управления или автоматическим по заданным логическим программам. 3.6.1 Система автоматического регулированияОбщей задачей автоматического регулирования является поддержание оптимальных условий протекания технологического процесса без участия человека. Система автоматического регулирования включает в себя следующие основные понятия: - объект или участок регулирования; - регулируемая величина; - регулирующий орган; - измерительное устройство; - усилительное устройство; - задающее устройство. При этом измерительное устройство или усилительное, совместно с задающим устройством, образуют непосредственно регулятор. Объект регулирования, регулирующий орган и регулятор образуют систему регулирования. Автоматические системы регулирования выполнены на базе аппаратуры «Каскад-2», которая выполнена на основе микроэлектроники в приборном исполнении. В качестве основных источников информации используются первичные преобразователи давления, термопреобразователи сопротивления и термоэлектрические термопреобразователи совместно с нормирующими преобразователями. Система дистанционного управления включает в себя исполнительный или приводной механизм (электропривод, пневмопривод, гидропривод), предназначенный для перемещения запорного или регулирующего органа, и совокупность устройств, предназначенных для управления приводным механизмом (ключи управления, индикаторы положения, блоки управления, пусковые устройства электродвигателей, автоматические выключатели и т.п.). Информация о значении регулируемого параметра в виде нормированного сигнала 0÷5 мА постоянного тока поступает из измерительного преобразователя технологического параметра. Сигнал сравнивается в сравнивающем устройстве с заданным значением. При наличии разбаланса между заданным и текущем значениями регулируемого параметра на выходе сравнивающего устройства формируется сигнал, пропорциональный их разности. Разностной сигнал поступает на вход регулирующего прибора, в котором он обрабатывается по соответствующему алгоритму, а на выходе формируются управляющие команды. Команды управления через усилительные каскады поступают исполнительный механизм, приводящий в движение регулирующий орган. Регулирующий орган, перемещаясь по командам от регулирующего прибора, изменяет параметры регулируемого аппарата, постепенно сводя к нулевому значению разбаланс регулятора. В зависимости от динамических характеристик регулируемого объекта и технологических требований к характеру переходных процессов в автоматических системах регулирования могут реализовываться следующие законы регулирования: - позиционный; - пропорциональный (статический); - интегральный (астатический); - пропорционально–интегральный; - пропорционально–интегрально–дифференциальный. Позиционное регулирование характеризуется дискретным изменением выходного сигнала в зависимости от изменения регулируемого параметра (включение, отключение нагревателей в компенсаторе давления). Пропорциональные регуляторы (П–регуляторы) оказывают воздействие «Y» на регулирующий орган пропорционально отклонению регулируемой величины «Х». При этом изменение положения регулирующего органа пропорционально изменению регулируемого параметра. Интегральные регуляторы (И–регуляторы) оказывают воздействие на регулирующий орган пропорционально интегралу от отклонения регулируемой величины, т.е. изменение положения регулирующего органа зависит от значения отклонения регулируемого параметра и времени воздействия отклонения. Пропорционально–интегральные регуляторы (ПИ–регуляторы) оказывают воздействие на регулирующий орган пропорционально отклонению и интегралу от отклонения регулируемой величины. Пропорционально–интегрально – дифференциальные регуляторы (ПИД–регуляторы) оказывают воздействие на объект регулирования пропорционально отклонению регулируемой величины, интегралу от этого отклонения и скорости изменения регулируемой величины. В конструкции аппаратуры «Каскад-2» используется блочно-модульный принцип. Блоки аппаратуры имеют индивидуальные источники питания и, в зависимости от используемых модулей, могут выполнять различные функции. В регулирующих устройствах авторегуляторов используются следующие блоки: Р27 – блок регулирующий; А05 – блок суммирования и ограничения сигналов; А06 – блок ограничения и размножения сигнала; А35 – блок вычислительных операций; Д05 – блок динамических преобразований; Д07 – блок интегрирования; Л03 – блок аналого-релейного преобразования; Н05 – блок нелинейных преобразований. В качестве примера построения авторегулятора рассмотрим структурную схему автоматического регулятора, представленную на рисунке 21. В качестве задающих устройств в системах авторегулирования на энергоблоках ОП ЗАЭС применяются модули ЗУ11 и ЗУ05. Задающее устройство ЗУ11 состоит из потенциометра с шкалой указателя положения подвижного контакта от минус 100 до 100 %. Регулирующий блок Р27 выполняет следующие функции: 1) гальваническое разделение входных и выходных цепей, а также входных цепей друг от друга; 2) введение задания регулируемой величины; 3) суммирование унифицированных входных сигналов постоянного тока, формирование сигнала отклонения регулируемой величины от заданного значения (формирование сигнала рассогласования); 4) демпфирование сигнала отклонения (сигнала рассогласования); 5) формирование выходного импульсного электрического сигнала для воздействия на управляемый процесс в соответствии с одним из законов регулирования. 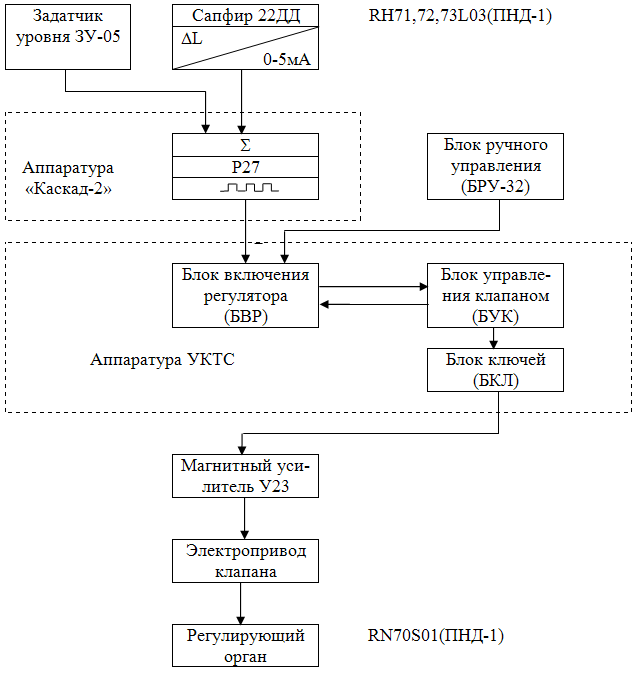  Усилитель Рисунок 21 - Структурная схема авторегулятора Система работает следующим образом – сигнал от задающего устройства параметра в виде унифицированного сигнала 0÷5 мА подается на вход суммирующего устройства, которое входит в состав регулирующего блока Р27 (аппаратура «Каскад-2»). Одновременно на другой вход суммирующего устройства подается сигнал обратной связи от измерительного преобразователя, измеряющего текущее значение регулируемого параметра. Сравнивающее устройство может производить не только суммирование, но и вычитание. Из сигнала задатчика вычитается сигнал текущего значения регулируемого параметра. В результате на выходе суммирующего устройства формируется сигнал рассогласования (положительный или отрицательный) который в дальнейшем преобразуется в сигнал управления регулирующего блока Р27. Поскольку все исполнительные механизмы регуляторов имеют асинхронный двигатель переменного тока, скорость вращения которого постоянна, то сигнал управления от регулятора Р27 представляет собой последовательность импульсов управления и пауз между ними. Чем длиннее импульс управления, тем на большую величину перемещается исполнительный механизм. Длительность импульсов управления пропорциональна величине сигнала рассогласования на входе регулятора. Далее сигнал управления от регулятора поступает на логическую схему управления, которая предназначена для перевода с автоматического управления исполнительным механизмом на дистанционное (ручное) и наоборот. Указанную функцию выполняет аппаратура УКТС (блок включения регулятора – БВР). Непосредственное переключение «автомат-ручное» исполнительного механизма производится оператором с помощью блока ручного управления (БРУ-32), в состав которого входит ключ переключения и кнопки дистанционного управления «БОЛЬШЕ» и «МЕНЬШЕ». Кроме того в блоке БРУ-32 предусмотрено устройство индикации прохождения сигналов автоматического управления на исполнительный механизм и индикатор положения исполнительного механизма. Воздействие от ключа переключения «автомат-ручное», также передаются на блок БВР. В состав логической схемы управления также входит блок управления каналом (БУК), выполненный на аппаратуре УКТС и формирующий команды на открытие и закрытие регулирующего органа. В БУК также поступает информация от концевых выключателей исполнительного механизма. При полном открытии регулирующего органа запрещается прохождение команд «больше» и полном закрытии – команд «меньше». Далее от БУК команды поступают на блок ключей (БКЛ), выполненный также на аппаратуре УКТС. БКЛ является усилителем сигнала управления и предназначен для выдачи команд управления на магнитные усилители или магнитные пускатели при электроприводах большой мощности. БКЛ представляют собой тиристорные ключи. Магнитные усилители, исполнительные автоматы и магнитные пускатели выдают команды непосредственно на электродвигатели привода регулирующих органов воздействующих на объект регулирования. Значение регулируемого параметра принимается первичным измерительным преобразователем. Таким образом, контур регулирования замыкается. Основными отличиями отдельных систем регулирования являются различные измерительные преобразователи, различные характеристики исполнительных механизмов и настройки регулирующего блока, которые определяются характеристиками объекта регулирования. 3.6.2 Система дистанционного управленияСистемы дистанционного управления предназначены для управления трубопроводной арматурой. В состав системы дистанционного управления входят:
Трубопроводной арматурой называются группа устройств, устанавливаемых на трубопроводах и емкостях для управления потоками рабочих сред. Арматура подразделяется на управляемую и действующую автоматически. Управление арматурой производится вручную или с помощью привода действующего от постороннего источника энергии. Эксплуатируемая на энергоблоках арматура по функциональному назначению делится на основные виды:
Управление потоком среды в арматуре осуществляется с помощью рабочего запорного или регулирующего органа, состоящего из затвора и седла. Затвор представляет собой деталь или конструктивно объединенную группу деталей, перемещающуюся или поворачивающуюся с помощью шпинделя или штока относительно седла. В зависимости от устройства трубопроводная арматура управляется разными типами приводов. На энергоблоках ЗАЭС эксплуатируются следующие типы приводов:
Схемы управления приводами включают в себя:
Схемы управления пневматическими приводами обеспечивают:
Схемы управления электроприводами обеспечивают:
Схема дистанционного управления запорной арматурой представлена на рисунке 22. Рассмотрим принцип ее работы. 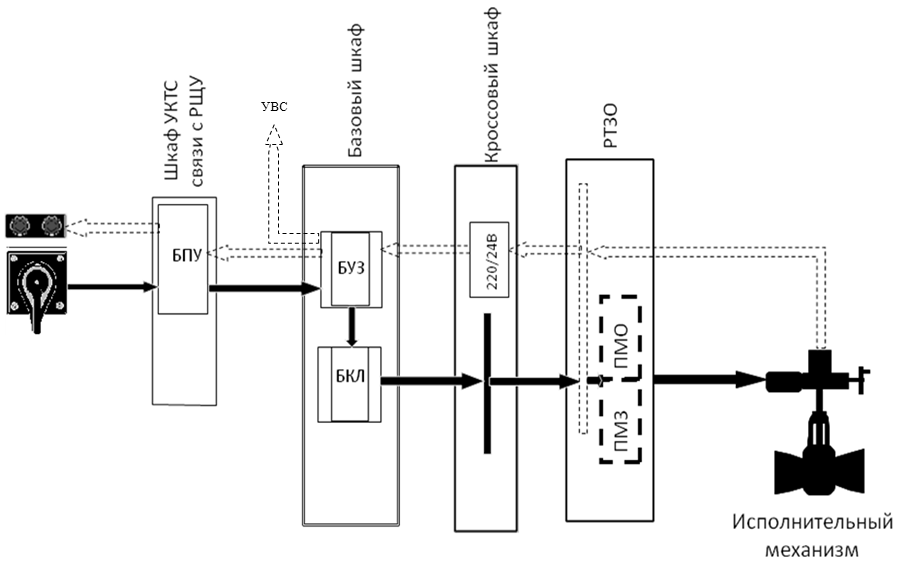 Рисунок 22 - Схема дистанционного управления арматурой Команда оператора от ключа управления, расположенного на панели щита управления, поступает в блок промежуточного управления (БПУ). БПУ предназначен для контроля достоверности команд управления и формирование выходной команды на вход дистанционного управления блока управления запорным органом (БУЗ) или двигателем (БУД). Блок промежуточного управления выполняет следующие функции: - прием команды оператора «Открыть» и «Закрыть»; - выдача команд на блок индивидуального управления; - блокирование команд при неисправностях в цепи подачи команд оператора; - выдача информации оператору по положению объекта управления; - выдача информации в УВС о поданных оператором командах, а также о блокировании канала управления. Сформированная команда из блока БПУ поступает в блок индивидуального управления арматурой (БУЗ), который предназначен для: - приёма команды от ключа или блока управления - выдачи информации на лампы сигнализации и в УВС о прохождении команды от ключа управления или от БРУ-32; - выдачи информации на лампы сигнализации и в УВС о состоянии запорной арматуры или механизмов; - обеспечения приоритета выполнения команд; - выдачи команды на коммутационные аппараты; - приёма информации о состоянии запорной арматуры или механизмов. Команда управления от БУЗ поступает в блок логических ключей (БКЛ). БКЛ принимает входные команды «Открыть» или «Закрыть» от блока управления запорным органом БУЗ и с гальваническим разделением коммутирует выходные силовые электрические цепи. Силовые команды через кроссовый шкаф поступают в сборку РТЗО, в которой расположены магнитные пускатели открытия (ПМО) и закрытия (ПМЗ), коммутирующие силовое электропитание в виде трехфазного напряжения 380 В или однофазного напряжения 220 В на обмотки электродвигателя исполнительного механизма. Кроме магнитных пускателей в шкафу РТЗО расположены автоматические выключатели, предназначенные для защиты электродвигателей при заклинивании исполнительного механизма, а также защиты цепей управления и силовых цепей электропривода от короткого замыкания с помощью электромагнитных и тепловых расцепителей. Если по условиям работы запорной арматуры требуется дополнительное ее уплотнение после закрытия, то в шкафу РТЗО устанавливаются реле токовой затяжки. В состав электропривода запорной арматуры входят блок электрических зажимов, электродвигатель, редуктор, ручной дублер и блок путевых и моментных выключателей. В блоке путевых и моментных выключателей располагаются коробка путевых выключателей, моментные муфты и местный указатель положения. Концевые выключатели запорной арматуры обтекаются переменным током напряжением 220 В. Замкнутое состояние «верхнего» и «нижнего» концевых выключателей свидетельствует о промежуточном положении запорной арматуры. При этом разрешается перемещение арматуры как на открытие, так и на закрытие. По достижении арматурой любого из концевых выключателей, контакты этого выключателя механически размыкаются и электродвигатель привода останавливается. При этом дальнейшее движение арматуры в данном направлении невозможно. Информация от путевых выключателей в виде сигнала переменного тока напряжением 220 В поступает в кроссовый шкаф. В кроссовом шкафу напряжение снижается до значения 24 В переменного тока с помощью электрических делителей. Сигнал из кроссового шкафа поступает в базовый шкаф УКТС на вход блока БУЗ. В блоке БУЗ информация от концевых выключателей используется для формирования управляющих воздействий, а также размножается для передачи в УВС энергоблока и для индикации на панелях щитов управления. |