Теоретическое введение
 Скачать 0.63 Mb. Скачать 0.63 Mb.
|

|
fд = fд*tg*θ0,707, (3.5) или Δfд / fд = tg*Δ (3.6) где θ0,707 – ширина диаграммы направленности по уровню 0,707 по давлению. Для = 60° и θ0,707 = 3° относительная ширина спектра составляет около 10 %. Информация о скорости судна содержится в средней Доплеровской частоте. Для измерения двух составляющих скорости используются многолучевые доплеровские системы. При этом наибольшее распространение получили системы с диаметрально-траверзным и X- образным (рис. 7) расположением лучей. Рисунок 7 - Четырёхлучевая доплеровская система с X-образным расположением лучей 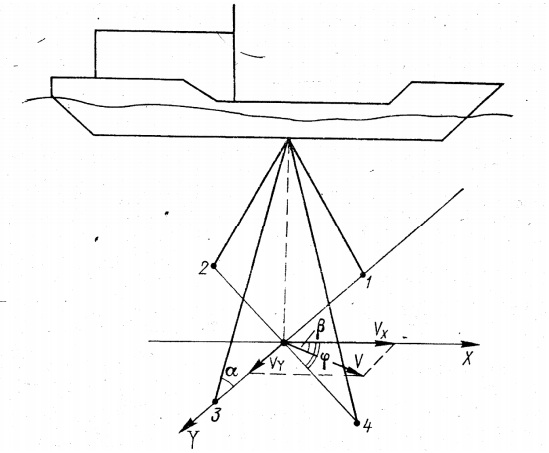 П  ри Х-образном расположении лучей (рис. 7) разность частот, принятых по первому и третьему лучам, при условии Vz = 0 определяется выражением: ри Х-образном расположении лучей (рис. 7) разность частот, принятых по первому и третьему лучам, при условии Vz = 0 определяется выражением:(3.7) Разность частот по второму и четвертому лучам имеет вид:  (3.8) Решая совместно уравнения (3.7) и (3.8) получим: 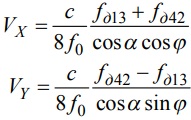 (3.9) (3.10) Тогда для путевой скорости и угла сноса можно записать: 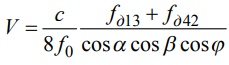 (3.11)  (3.12) (3.12)[3, стр. 39 – 45] Решение. Для того чтобы определить направление излучения, то есть величину угла необходимо вывести его через формулу (3.11), в итоге получаем: cos*cosβ*cosφ*8f0 = (с*(fд13+fд42)) / V cos = (с*(fд13+fд42)) / (V* cosβ*cosφ*8f0) = arccos(с*(fд13+fд42)) / (V* cosβ*cosφ*8f0)] (3.13) где c – скорость звука в воде (примем равную 1468,5 м/с при температуре воды +4°, глубине 100 м и солености 35 промилле); fд13 и fд42 – разности частот звуковых волн, принятых поперечными и продольными антеннами лага соответственно; V – cкорость судна, м/с; β – угол сноса судна; φ – угол смещения продольных антенн лага относительлно диаметральной плоскости судна; f0 – частота излучения. Скорость судна в узлах необходимо перевести в м/с: 1 узел = 0,514 м/с 21 узел = 0,514 * 21 = 10,794 [м/с] Подставив значения в формулу (3.13) получим: = arcos(1468,5*(1200+770)) / (10,794*0,99*0,73*8*126000)] = arcos(0,37) = 68,4° Ответ: Направление излучения, то есть величина угла = 68,4° Задача 98. На судне, следующим скоростью 21 уз и со сносом 6°, установлен гидроакустический корреляционный лаг. Определить при каком дифференте судна погрешность в показаниях лага составит 0,3 узла. Крен судна не учитывать. Теоретическое введение. Принцип действия гидроакустического корреляционного лага заключается в измерении временного сдвига между акустическими сигналами, излученными с движущегося судна, отраженными от морского дна и принятыми разнесенными в направлении движения антеннами. На рис. 5.1 схематически изображены три антенны А, В и М, установленные на судне вдоль диаметральной плоскости, которые в отсутствии сноса движутся одна за другой по одной и той же траектории. Диаграммы направленности антенн одинаковы и перекрывают друг друга. Для определённых частот поверхность морского дна можно рассматривать как совокупность большого числа случайно распределённых элементарных отражателей. Рисунок 8 – принцип действия гидроакустического корреляционного лага  Расстояние AB = 2AM = 2L. Антенна М работает на излучение, антенны А и В - на прием. Предположим, что в какой-то момент времени, принятый за нулевой, излучатель М посылает сигнал в направлении точки О. При отражении от грунта звуковые колебания модулируются определенным образом в зависимости от характера и структуры грунта. Модуляция сигнала, кроме того, зависит от расстояния, проходимого им в воде. Отразившись от морского дна эхо-сигнал поступает в приемник А, где воспроизводится рельеф дна в виде непрерывного профиля, который можно рассматривать как реализацию случайной функции Rx. Эхосигнал также поступит в приемник В, но из-за того, что им пройдено другое расстояние, он модулирован по-другому и, следовательно, реализация случайной функции R2, записанная с помощью приемника В, будет непохожа на Rx (заметной корреляции нет). После того, как судно переместиться на расстояние AM = L , антенны займут новое по отношению к точке О положение. Излученный сигнал, отразившись от грунта, опять попадает в приемники А и В. Поскольку теперь, спустя некоторое время, называемое временем запаздывания, эхосигнал до приемника В проходит такой же геометрический путь, какой предыдущий преодолевал до приемника А, реализация случайной функции R2 близка к R1 (корреляция сильная). Все сказанное справедливо для любой точки морского дна, которая находится в зоне, перекрываемой диаграммой направленности излучателя. Для определения искомого времени запаздывания т сигналы обрабатываются схемой лага. Для этого в канал первого сигнала вводится временная задержка и меняется до тех пор, пока не наступит максимум взаимокорреляционной функции сигналов антенн А и В. При отсутствии сноса коэффициент взаимной корреляции сигналов, принимаемых антеннами, равен: 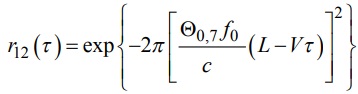 (4.1) Из последнего выражения следует, что максимальное значение функции r12 (τ) наступит при L – Vτ = 0. Отсюда получим: V = L / τ (4.2) Формула (4.2) называется уравнением однокомпонентного корреляционного лага. Как следует из равенства (4.2), измеряемые корреляционным лагом значения скорости не зависят от скорости распространения звука в воде. При реальных соотношениях скорости судна и скорости звука в воде судно за время между излучением и приёмом отражённого сигнала может сместиться на расстояние, превышающее измерительную базу. Данное обстоятельство несколько снижает степень совпадения сигналов, однако и в этом случае максимальное их совпадение наблюдается при выполнении условия (4.2). Временной сдвиг τ иногда называют транспортным запаздыванием. Погрешности, возникающие при прохождении сигналов через приемный и вычислительно-измерительный тракты корреляционного лага, зависят от структуры конкретных устройств, характеристик входящих в них элементов и т.д. В реальных условиях плавание вследствие качки, статических кренов и дифферентов возникают дополнительные погрешности измерения. Наличие сноса, отклонения плоскости антенной системы от горизонтальной плоскости приводят к тому, что максимум корреляции наблюдается при смещении судна не на расчетное расстояние L, а на X’ проекции этого расстояния на линию пути. Так как в вычислительное устройство корреляционного лага закладывается параметр L, то в указанных условиях возникают погрешности в измерении скорости. При движении судна со сносом и дифферентом для одномерного лага можно записать: X’ = L*cosβ*cosψ (4.3) Истинное значение скорости в этом случае равно: Vи = (L*cosβ*cosψ)/τ (4.4) Лаговое же значение скорости будет завышено: Vл = L/τ (4.5) Относительная погрешность измерения при этом составит: ΔV/V = 1 – cosβ*cosψ (4.6) Решение. Дифферент судна найдем по формуле, которую выведем из формулы (4.6): cosβ*cosψ = 1 – ΔV/V cosψ = (1 – ΔV/V) / cosβ ψ = arcos [(1 – ΔV/V) / cosβ] Подставив в формулу исходные данные, получим: ψ = arcos[(1 – 0,3/21) / cos(6°)] = arcos(0,99) = 7,6° Ответ: При дифференте судна ψ = 7,6° погрешность в показаниях лага составит 0,3 узла. Задача 135. В некоторой точке земной поверхности магнитное склонение составляет 10,26° E, вертикальная составляющая вектора магнитной индукции и восточная проекция его горизонтальной составляющей равны 49919,6 и 3515,7 нТл соответственно. Определить магнитное наклонение. Теоретическое введение. Источником магнитного поля Земли являются процессы, происходящие внутри планеты. Наблюдаемые свойства магнитного поля Земли согласуются с наиболее распространенным представлением о его возникновении благодаря механизму гидромагнитного динамо. В этом процессе первоначальное магнитное поле усиливается в результате движений электропроводящего вещества в жидком ядре планеты. При температуре вещества в несколько тысяч кельвинов его проводимость достаточно высока, чтобы конвективные движения, происходящие даже в слабо намагниченной среде, могли возбуждать изменяющиеся электрические токи, способные, в соответствии с законами электромагнитной индукции, создавать новые магнитные поля. Затухание этих полей либо создает тепловую энергию (по закону Джоуля), либо приводит к возникновению новых магнитных полей. В зависимости от характера движений эти поля могут либо ослаблять, либо усиливать исходные поля. Для усиления поля достаточно определенной асимметрии движений. Таким образом, необходимым условием гидромагнитного динамо является само наличие движений в проводящей среде, а достаточным - наличие определенной асимметрии (спиральности) внутренних потоков среды. Подсчитано, что зона, в которой действует механизм «магнитного динамо», находится на расстоянии 0,25-0,30 радиуса Земли. В первом приближении Землю можно считать геоцентрическим магнитным диполем, ось которого проходит через ее центр. В настоящее время угол между нею и земной осью составляет 10° (несколько десятилетий назад это величина составляла более 11°). При более точном моделировании выясняется, что дипольная ось смещена относительно центра Земли в направлении северо-западной части Тихого океана примерно на 540 км (это эксцентрический диполь). Магнитное поле Земли по форме до расстояний менее трех радиусов близко к полю такого магнитного диполя (рис. 9). Реальные магнитные силовые линии магнитного поля Земли в среднем близки к силовым линиям этого диполя, отличаясь от них местными нерегулярностями, связанными с наличием намагниченных пород в коре. Наибольшие отклонения магнитных силовых линий Земли от силовых линий диполя наблюдаются в районах так называемых мировых и локальных магнитных аномалий, наличие которых обусловлено большими залежами железосодержащих пород. Точки пересечения оси земного магнитного диполя и поверхности Земли образуют так называемые геомагнитные полюса. Однако и они не совпадают с магнитными полюсами, то есть полученными по результатам измерений характеристик магнитного поля. Рисунок 9 – Современное представление о магнитном поле Земли 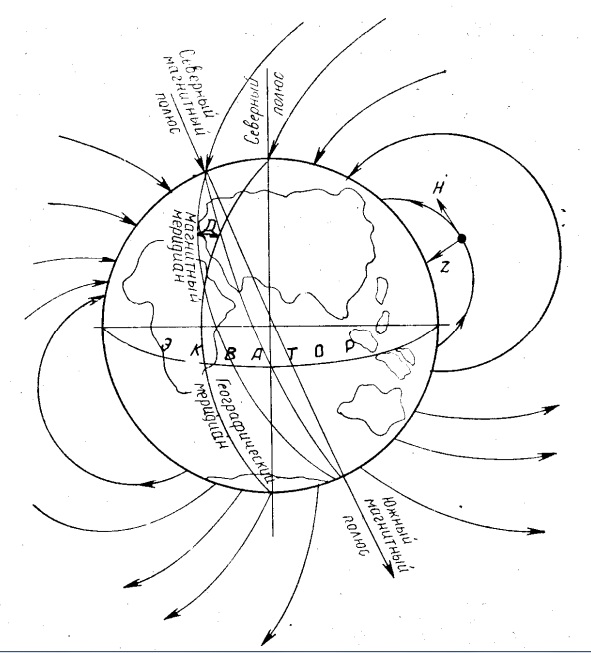 Магнитное поле существует не менее 3,5 млрд лет и за это время магнитные полюса тысячи раз обменивались местами. Иногда геомагнитное поле сохраняет ориентацию в течение десятков миллионов лет, а иногда - не более пятисот веков. Сам процесс инверсии обычно занимает несколько тысячелетий, и по его завершении напряженность поля, как правило, не возвращается к прежней величине, а изменяется на несколько процентов. В настоящее время напряженность земного магнитного поля в среднем падает, причем неравномерно. Однако в некоторых районах напряженность магнитного поля, вопреки общей тенденции, даже возросла. Магнитный полюс, как его ни определяй, не стоит на месте. Северный полюс геоцентрического диполя в 2000 году имел координаты 79,5 |