Учебнометодические указания для выполнения лабораторных работ для студентов по дисциплине Электрооборудование в апк
 Скачать 1.25 Mb. Скачать 1.25 Mb.
|

|
Координаты точек: Точка А (М = 0 ; = с); с – синхронная скорость вращения, рад/с. с = ∙nс / 30, рад/с. (2.1) Точка В (М = Мн ; = н); Мн – номинальный момент электродвигателя, Нм.; н - номинальная скорость вращения, рад/ с. Мн = 1000 ∙Рн / н, Н м; (2.2) н = ∙ nн / 30, рад/с; (2.3) Точка С (М = Мкр; =кр); Мкр – момент критический (или максимальный ), Н м ; кр – критическая скорость вращения, рад/с. Мкр = кр ·Мн, Н м; (2.4) кр = с (1 – Sкр ), рад/с. (2.5) где Sкр - критическое скольжение, о.е. Sкр =Sн (кр +  ); (2.6) ); (2.6)Точка Д (М = Мпуск; = 0); Мпуск – пусковой момент электродвигателя, Н м; Мпуск = п·Мн , Н м ; (2.7) Примечание: Если нагрузка у АД с к.з. ротором номинальная и параметры сети соответствуют номинальным данным, то запуск электродвигателя осуществляется от точки Д далее точка С и рабочая точка это точка В. 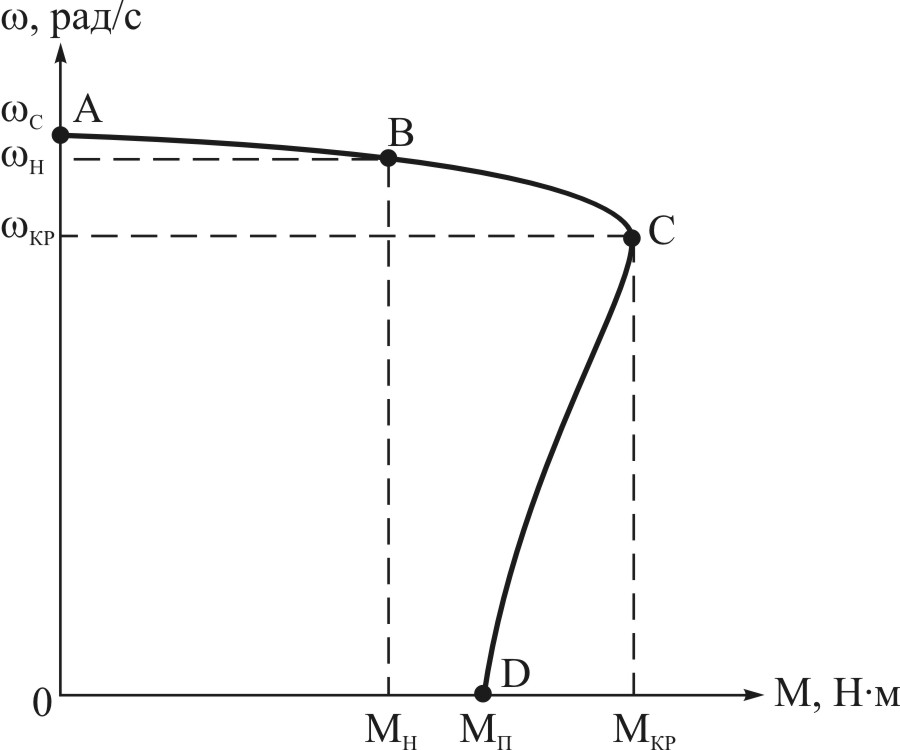 Рисунок 2.1 - Естественная механическая характеристика асинхронного электродвигателя с к.з. ротором, построенная по 4-м точкам 2.2 Построение естественной механической характеристики асинхронного электродвигателя с к.з. ротором по уравнению Клосса при помощи ПК Уравнение механической характеристики АД: M = (S) описывается уравнением Клосса: М =  ; (2.8) ; (2.8)где Ммакс – максимальный (критический) момент электродвигателя, Н·м; Sкр - критическое скольжение, соответствующее критическому моменту, о.е. а = R1|/ R2|| - отношение активного сопротивления R1| фазы обмотки статора АД к приведённому активному сопротивлению R2|| фазы обмотки ротора. Методические указания: Электронная таблица - EXCEL Рабочее поле Excel представляет собой не чистый лист, а пустую таблицу, которую предстоит заполнять. В таблице добавляются номера строк и буквы столбцов, таблица становится адресной, т.е. у каждой клетки есть адрес, как на шахматной доске. Значит, у любой информации таблицы есть адрес, так же как и у фигуры на шахматной доске. Теперь в таблице можно писать формулы расчёта, используя адреса с информацией. Таблица 2.1
Когда исходные данные в адресах меняются, одновременно пересчитываются и все формулы с этими адресами. Порядок выполнения работы 1. Рассчитать координаты 4-х точек по каталожным данным АД серии АИ по заданному преподавателем варианту и построить естественную механическую характеристику. 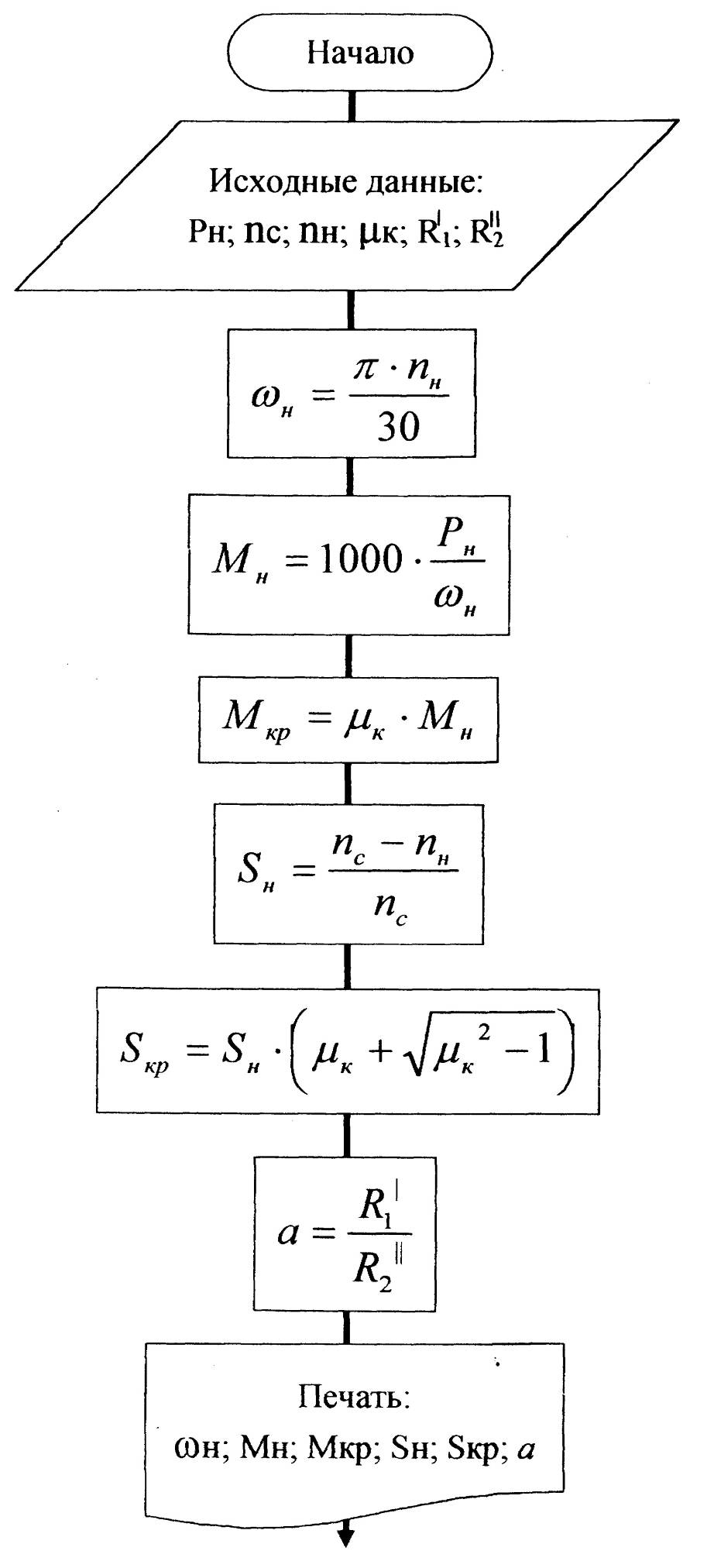 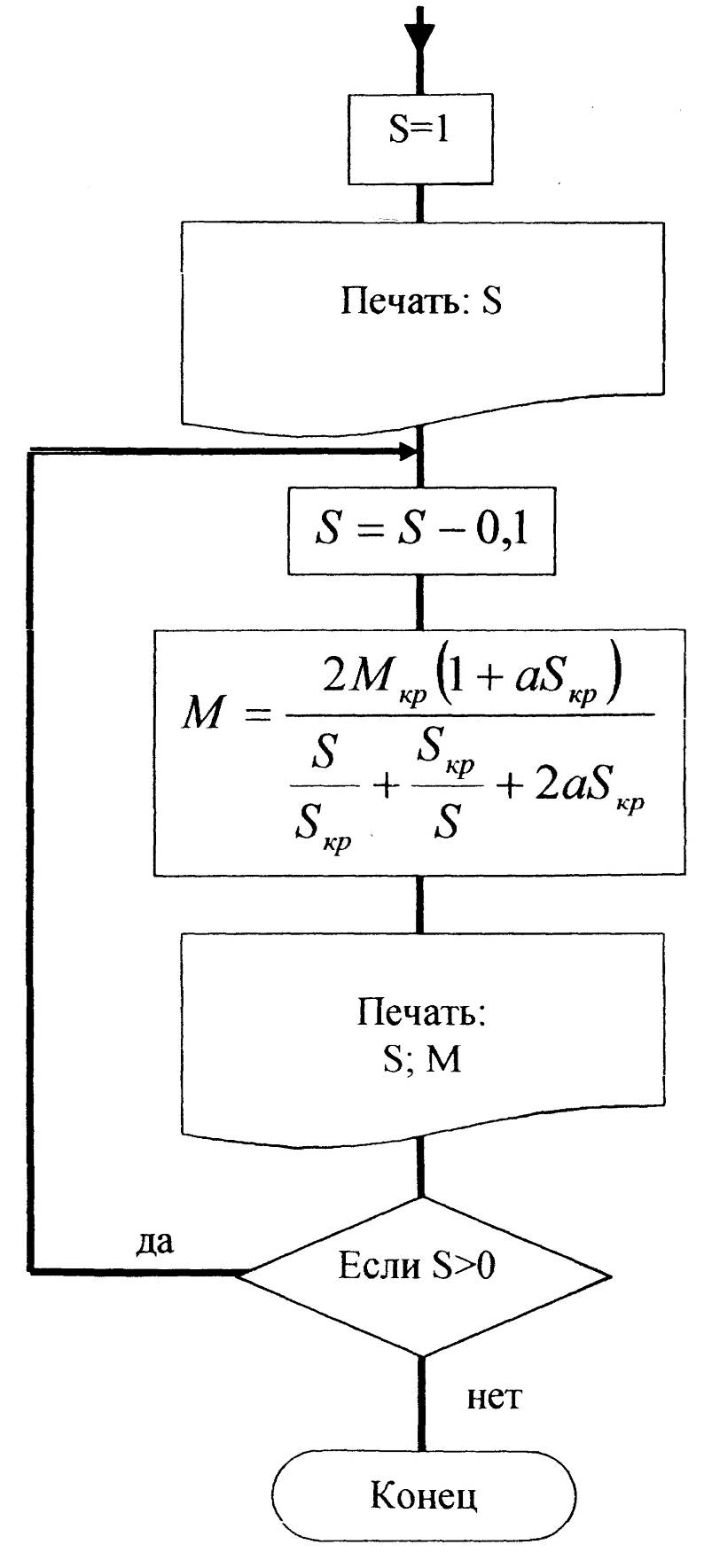 Рисунок 2.2 - Блок-схема алгоритма расчета координат для построения естественной механической характеристики асинхронного двигателя с к.з. ротором Инструкция по заполнению электронной таблицы EXCEL для реализации вычислительного алгоритма определения координат для построения естественной механической характеристики асинхронного двигателя с к.з. ротором
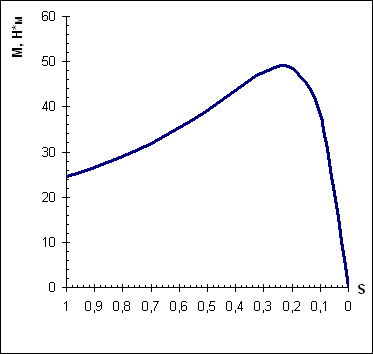
Рисунок 2.3- Естественная механическая характеристика асинхронного двигателя с к.з. ротором 2. Изучить блок-схему алгоритма расчёта координат для построения естественной механической характеристики асинхронного электродвигателя с к.з. ротором (рис.2.2.). 3. Изучить инструкцию по заполнению электронной таблицы ЕХСЕL для реализации вычислительного алгоритма расчёта координат для построения естественной механической характеристики АД с к.з. ротором. 4. Заполнить электронную таблицу ЕХСЕL согласно инструкции по заданному преподавателем варианту и получить механическую характеристику М = (S) для АД серии АИ (рис. 2.3.). 5. Распечатать на принтере результаты расчётов. Контрольные вопросы 1. Как обозначается, и какие единицы измерения имеет угловая частота вращения электродвигателя? 2. Как обозначается, и какие единицы измерения имеет угловая скорость вращения электродвигателя? 3. Каково соотношение между скоростью вращения электродвигателя и частотой его вращения? 4. Что называется механической характеристикой электродвигателя? 5. Для чего необходимы механические характеристики электродвигателей? 6. Какая механическая характеристика называется естественной? 7. Как определить номинальный момент электродвигателя? 8. Как определить максимальный момент электродвигателя? 9. Как определить пусковой момент электродвигателя? 10. Как определить скольжение электродвигателя? 11. Чему равняется скольжение электродвигателя при пуске? 12. Как определить критическое скольжение? 13. Как называется частота вращения магнитного поля статора? 14. Как определить критическую скорость вращения? Лабораторная работа № 3 ИССЛЕДОВАНИЕ АППАРАТОВ УПРАВЛЕНИЯ И ЗАЩИТЫ Цель работы: Изучить устройство, принцип работы, назначение и технические характеристики автоматических выключателей, контакторов, электромагнитных пускателей. Программа работы 1. Изучить конструкцию, назначение и принцип действия автоматического выключателя; 2. Изучить конструкцию назначение и принцип действия контактора; 3. Изучить конструкцию назначение и принцип действия магнитного пускателя; 4. Оформить отчет о работе. КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ Магнитный пускатель - это модифицированный контактор. В отличие от контактора, магнитный пускатель комплектуется дополнительным оборудованием: тепловым реле, дополнительной контактной группой или автоматом для пуска электродвигателя. Пускатель электромагнитный (магнитный пускатель) — это низковольтное электромагнитное (электромеханическое) комбинированное устройство распределения и управления для пуска и разгона электродвигателя до номинальной скорости, обеспечения его непрерывной работы, отключения питания и защиты электродвигателя и подключенных цепей от рабочих перегрузок. 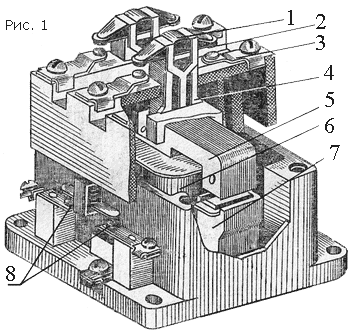 Рисунок 3.1 – Магнитный пускатель Внутри корпуса пускателя (рис. 3.1) размещена электромагнитная система, включающая в себя неподвижную Ш-образную часть сердечника 7 и обмотку 6, намотанную на катушку. Сердечник набран из изолированных друг от друга (для уменьшения потерь от вихревых токов) листов электротехнической стали. Подвижная часть сердечника 5 (якорь) соединена с пластмассовой траверсой 4, на которой смонтированы контактные мостики 2 с подвижными контактами. Плавность замыкания контактов и необходимое усилие нажатия обеспечиваются контактными пружинами 1. Неподвижные контакты припаяны к контактным пластинам 3, снабженным винтовыми зажимами для присоединения проводов внешней цепи. Кроме главных контактов, пускатели имеют дополнительные (блокировочные) контакты 8, расположенные на боковых поверхностях аппарата. Главные контакты закрыты крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий. Пускатель представляет собой контактор, комплектованный дополнительным оборудованием: тепловым реле, дополнительной контактной группой или автоматом для пуска электродвигателя, плавкими предохранителями. Помимо простого включения, в случае управления электродвигателем пускатель может выполнять функцию переключения направления вращения его ротора (т. н. реверсивная схема), путем изменения порядка следования фаз для чего в пускатель встраивается второй контактор. Переключения обмоток трехфазного двигателя со «звезды» на «треугольник» производится для уменьшения пускового тока двигателя. Исполнение магнитных пускателей может быть открытым и защищенным (в корпусе); реверсивным и нереверсивным; с встроенной тепловой защитой электродвигателя от перегрузки и без нее. Реверсивный магнитный пускатель представляет собой два трёхполюсных контактора, укреплённых на общем основании и сблокированных механической или электрической блокировкой, исключающей возможность одновременного включения контакторов. Магнитные пускатели предназначены для применения в стационарных установках для дистанционного пуска непосредственным подключением к сети, остановки и реверсирования трехфазных асинхронных электродвигателей с короткозамкнутым ротором при напряжении до 660В и номинальном токе частотой 50 и 60 Гц. При наличии тепловых реле пускатели осуществляют защиту управляемых электродвигателей от перегрузки недопустимой продолжительности и от токов, возникающих при обрыве одной из фаз. Пускатели, комплектуемые ограничителями перенапряжений, пригодны для работы в системах управления с применением микропроцессорной техники. Наиболее распространенные серии пускателей с контактной системой и электромагнитным приводом: ПМЕ, ПМА, ПА, ПВН, ПМЛ, ПВ, ПАЕ, ПМ12. Принцип действия нереверсивного магнитного пускателя заключается в следующем: при включении пускателя по катушке проходит электрический ток, сердечник намагничивается и притягивает якорь, при этом главные контакты замыкаются, по главной цепи протекает ток. При отключении пускателя катушка обесточивается, под действием возвратной пружины якорь возвращается в исходное положение, главные контакты размыкаются. Контактор - это дистанционно управляемый коммутационный аппарат, позволяющий коммутировать мощные (в том числе индуктивные) нагрузки как переменного, так и постоянного тока. Отличительной особенностью электромагнитных контакторов, по сравнению с близкими к ним электромагнитными реле является то, что контакторы разрывают электрическую цепь в нескольких точках одновременно, в то время как электромагнитные реле обычно разрывают цепь только в одной точке. Контакторы – это аппараты дистанционного действия, предназначенные для частых включений и отключений силовых электрических цепей при нормальных режимах работы. Электромагнитный контактор представляет собой электрический аппарат, предназначенный для коммутации силовых электрических цепей. Замыкание или размыкание контактов контактора осуществляется чаще всего с помощью электромагнитного привода. Общепромышленные контакторы классифицируются: · по роду тока главной цепи и цепи управления (включающей катушки) - постоянного, переменного, постоянного и переменного тока; · по числу главных полюсов - от 1 до 5; · по номинальному току главной цепи - от 1,5 до 4800 А; · по номинальному напряжению главной цепи: от 27 до 2000 В постоянного тока; от 110 до 1600 В переменного тока частотой 50, 60, 500, 1000, 2400, 8000, 10 000 Гц; · по номинальному напряжению включающей катушки: от 12 до 440 В постоянного тока, от 12 до 660 В переменного тока частотой 50 Гц, от 24 до 660 В переменного тока частотой 60 Гц; · по наличию вспомогательных контактов - с контактами, без контактов. Контакторы также различаются по роду присоединения проводников главной цепи и цепи управления, способу монтажа, виду присоединения внешних проводников и т.п. На сегодняшний день существует огромный выбор контакторов и пускателей всех типов для всех возможных видов электроустановок. Контакторы КМ – модульные контакторы, применяемые в основном в системах управления и автоматизации жилых, офисных, промышленных и прочих помещениях для управления и коммутации осветительных, обогревательных и вентиляционных и прочих инженерных систем. Применяются в сетях с напряжением до 380В переменного тока частотой 50Гц. Главные достоинства контактора КМ – малошумная коммутация, высокая коммутационная мощность и долговечность, свободный от фона переменного тока магнитный привод. Контакторы серии КМЭ – малогабаритные контакторы, предназначенные для дистанционного пуска, остановки и реверсирования трехфазных асинхронных двигателей с короткозамкнутым ротором в сетях переменного тока частотой 50/60Гц с напряжением до 660В (категория применения АС-3) и для дистанционного управления электрическими цепями в которых ток включения равен номинальному току нагрузки (категория АС-1).  Рисунок 3.2 – Контакторы серии КМЭ Контакторы этой серии отличают: компактные размеры, широкий ассортимент исполнений и катушек управления, большой выбор дополнительных устройств и возможность реализации реверсивного варианта управления, простота в обслуживании и эффективность работы. Контакторы серии КТЭ – также используются для использования в схемах управления трехфазных асинхронных электродвигателей с короткозамкнутым ротором в сетях с напряжением до 660В. Могут использоваться для включения и отключения таких систем как: нагревательных установок, освещения, насосных систем, печей, вентиляции и т.д. В ассортименте компании как одиночные нереверсивные контакторы, так и блочные реверсивные контакторы.   реверсивный контактор нереверсивный контактор Рисунок 3.3 – Реверсивный и нереверсивный контакторы Контакторы бывают трех видов: постоянного тока, контакторы переменного тока и контакторы постоянно-переменного тока. Контакторы постоянного тока предназначены для коммутации цепей постоянного тока и, как правило, приводятся в действие электромагнитом постоянного тока. Контакторы постоянного тока применяются для включения и отключения приемников электрической энергии в цепях постоянного тока; в электромагнитных приводах высоковольтных выключателей; в устройствах автоматического повторного включения. Контакторы постоянного тока выпускаются в основном на напряжение 22 и 440 В., токи до 630 А., однополюсные и двухполюсные. Контакторы переменного тока применяются для управления асинхронными трехфазными двигателями с короткозамкнутым ротором, для выведения пусковых резисторов, включения трехфазных трансформаторов, нагревательных устройств, тормозных электромагнитов и других электротехнических устройств. Контакторы переменного тока предназначены для коммутации цепей переменного тока. Электромагниты этих цепей могут быть как переменного, так и постоянного тока. Принцип работы контактора: на катушку управления подается напряжение, якорь притягивается к сердечнику и контактная группа замыкается или размыкается в зависимости от исходного состояния каждого из контактов. При отключении происходят обратные действия. Автоматические выключатели применяются для нечастых ручных включений и отключений электроприемников, а также для автоматического отключения цепей при перегрузках и коротких замыканиях. Автоматический выключатель состоит из диэлектрического корпуса, внутри которого располагаются подвижный и неподвижный контакты. Подвижный контакт подпружинен, пружина обеспечивает усилие для быстрого расцепления контактов. Механизм расцепления приводится в действие одним из двух расцепителей: тепловым или электромагнитным. Конструкция автоматического предохранителя представлена на (рис. 3.4)Тепловой расцепитель представляет собой биметаллическую пластину, нагреваемую протекающим током. При протекании тока выше допустимого значения биметаллическая пластина изгибается и приводит в действие пружину, отводящую подвижный контакт, разрывая тем самым электрическую цепь. Время срабатывания зависит от тока (время-токовая характеристика) и может изменяться от секунд до часа. Минимальный ток, при котором должен срабатывать тепловой расцепитель, составляет 1,3 от номинального тока предохранителя до 63А и свыше 63А 1,45 от номинального тока предохранителя. В отличие от плавкого предохранителя, автоматический предохранитель готов к следующему использованию после остывания пластины. Тем не менее, параметры автоматического предохранителя могут изменяться при каждом срабатывании из-за обгорания контактов. Эту особенность следует учитывать в промышленных установках. 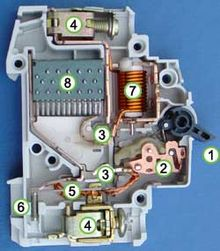 1 — тумблерный вкл/выключатель; 2 — механический привод; 3 — контактная система; 4 — разъёмы (2 шт); 5 — тепловой расцепитель; 6 — калибровочный винт; 7 — электромагнитный расцепитель; 8 — дугогасительная камера Рисунок 3.4 – Конструкция автоматического выключателя Магнитный расцепитель представляет собой соленоид, подвижный сердечник которого приводит в действие пружину, отводящую подвижный контакт. Ток, проходящий через автоматический выключатель, течет по обмотке соленоида и вызывает втягивание сердечника при превышении заданного порога. Мгновенный расцепитель, в отличие от теплового, срабатывает очень быстро (доли секунды), но при значительно большем превышении тока: в 6 и более раз от номинального тока, в зависимости от типа (автоматические выключатели делятся на типы A, B, C, D, E и K в зависимости от характеристики срабатывания расцепителей). | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||