Лекции См.Если нет в ответах. Учебное пособие для студентов специальности 140604 Электропривод и автоматика промышленных установок и технологических комплексов
 Скачать 4.39 Mb. Скачать 4.39 Mb.
|

3.2. Особенности конструкции ЭД станка-качалки.Используемые в электроприводе станка-качалки асинхронные электродвигатели с КЗ ротором серии 4А, 5А, АИР и др. имеют повышенный пусковой момент  обмотки ротора. После разгона двигателя распределение тока по сечению проводника выравнивается, активное сопротивление уменьшается и момент становится равным номинальному. обмотки ротора. После разгона двигателя распределение тока по сечению проводника выравнивается, активное сопротивление уменьшается и момент становится равным номинальному. ; ; Кроме АД с КЗ ротором находятся в опытной эксплуатации синхронные двигатели, которые могут регулировать коэффициент мощности сети при работе в режиме перевозбуждения. 3.3. Выбор мощности ЭД станков-качалок.При выборе мощности ЭД возможны две задачи. Первая задача возникает при уточнении мощности ЭД станка-качалки. Такой случай возможен при отклонении дебита скважины от запланированного, а также при изменении режима работы скважины. В этом случае подбор ЭД целесообразно производить по нагрузочной диаграмме мощности или момента. Режим работы ЭД длительный с циклически изменяющейся нагрузкой. Для выбора мощности ЭД достаточно рассмотреть один цикл работы (одно качание) и привести переменную нагрузку к неизменной стандартной. При этом используется один из методов: метод эквивалентного момента, эквивалентной мощности или эквивалентного тока. Эквивалентную или эффективную мощность Рэ электродвигателя определяют по формуле:  , ,где t1, t2 – время интервалов; Р1, Р2 – средние значения мощности в интервале. Требуемая номинальная мощность электродвигателя Рном определяется по условию: График нагрузки на валу двигателя может быть получен по показаниям ваттметра, установленного в одной из фаз статора двигателя. Вторая задача возникает при расчете мощности ЭД для вновь вводимой скважины. В этом случае для определения эффективной мощности нагрузки обычно используют формулы с учетом величины подачи насоса, глубины подвески насоса и технических параметров станка-качалки. Согласно формуле Б.М. Плюща и В. О. Саркисяна эффективная мощность электродвигателя определяется по формуле: где G – масса столба жидкости над плунжером, определяемая полной площадью плунжера и высотой подачи жидкости; S – длина хода устьевого штока; n – число качаний в секунду; ηп – КПД передачи от вала электродвигателя к валу кривошипа (0,96-0,98); k1 – конструктивный коэффициент, зависящий от типа станка-качалки; k2 – расчетный коэффициент. Эффективную мощность электродвигателя можно определить по другой формуле: Рэ=1,7∙ko∙ka∙d2∙H∙S∙n∙10-7+Рс, где ko – относительный коэффициент формы кривой момента на валу двигателя, равный отношению фактического коэффициента формы кривой kф к коэффициенту формы для синусоиды (1,11), ka – поправочный коэффициент, учитывающий влияние деформации штанг и труб; Н – глубина подвески насоса; Рс – постоянные потери в станке-качалке, не зависящие от нагрузки. Условие выбора мощности электродвигателя: Рном Рэ. Выбранный по условиям нагрева двигатель не во всех случаях будет удовлетворять требованиям работы в приводе станка-качалки. Он должен удовлетворять условиям пуска станка качалки и обеспечивать преодоление пиков нагрузочного момента при работе установки. При пуске станка-качалки ЭД должен развивать момент, обеспечивающий преодоление статического момента сопротивления и момента необходимого для разгона до установившейся скорости. Статический момент сопротивления при пуске превышает момент при установившемся режиме за счет увеличенных сил трения, обусловленных заеданием движущихся частей двигателя, выжиманием смазки, а также возможным наличием песчаных пробок. Протекание пускового процесса, обычно не превышающего 10 с, зависит от начального положения кривошипа и от того, как изменяется нагрузка после пуска, кроме того, начальный пусковой момент двигателя может уменьшаться при снижении питающего напряжения. Для нормальной работы СК (при хорошем уравновешивании) кратность максимального момента λ=Mmax/Мном должна находиться в пределах 1,8-1,9. Обычно значение λ у АД станков-качалок составляет 2,1-2,8, что обеспечивает надежную работу электропривода с перегрузками и при снижении напряжения в сети. 3.4. Коэффициент полезного действия и коэффициент мощности электродвигателей станков-качалок. В паспорте двигателя СК энергетические показатели η и cosφ (КПД и коэффициент мощности) указываются для номинального режима для длительной постоянной по величине номинальной нагрузки. Однако даже при идеальном уравновешивании станка-качалки график нагрузки двигателя остается неравномерным, так как не уничтожаются пульсации нагрузки, определяемые законом изменения скорости точки подвеса штанг. Из-за этого КПД и коэффициент мощности АД снижаются против номинальных значений. Это обусловлено тем, что при ухудшении уравновешивания станка-качалки увеличивается коэффициент формы Кф нагрузочного графика. Коэффициент формы Кф равен отношению эффективной мощности Рэ к средней мощности Рср: КПД и коэффициент мощности зависят также от коэффициента загрузки двигателя Кз. Снижение энергетических показателей двигателя приводит к росту непроизводительных потерь мощности и энергии. Графики изменения КПД () и коэффициента мощности (cos) в функции нагрузки на валу двигателя называют рабочими характеристиками двигателя станка-качалки. Средние значения параметров за цикл качания называют циклическим КПД (ц) и циклическим коэффициентом мощности cosц. Для их вычисления существуют специальные формулы. Степень снижения циклических (эксплуатационных) и cos при различных Кз и Кф показана на рис. 24. 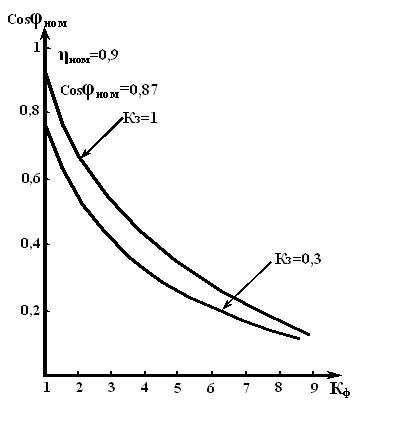 Рис. 24. Зависимость КПД и cos от коэффициента формы Кф и коэффициента загрузки двигателя Кз. При плохом уравновешивании Кф ≥ 4 и низкой загрузке (Кз ≤ 0,3) происходит резкое увеличение потерь электрической энергии в 3 и более раз. Поэтому при эксплуатации СК очень важно обеспечение выравнивания графика нагрузки двигателя и правильный подбор его мощности. 3.5. Особенности электроснабжения станков-качалок. Большая часть СК относится ко II категории надежности электроснабжения, так как прекращение электропитания не вызывает серьезных осложнений при их дальнейшей эксплуатации. Подача электропитания к станкам-качалкам обычно осуществляется по схеме глубокого ввода, т.е. повышенное напряжение 6 кВ подается по одной воздушной линии непосредственно к станку-качалке и трансформируется до 0,4 кВ. Для повышения надежности электроснабжения станков-качалок вводят автоматическое повторное включение линий, их кольцевание по схеме разомкнутого кольца. Имеющиеся линии целесообразно реконструировать так, чтобы длина одного плеча воздушной линии 6 кВ не превышала 6…8 км. Для обеспечения электроснабжения станков-качалок применяют комплектные трансформаторные подстанции КТПСК мощностью 25-250 кВА трех модификаций: первая модификация предназначена для питания одной скважины; подстанции 2-ой и 3-ей модификации – служат для питания двух или трех скважин.  а) б)  Рис. 25 Схемы питания глубиннонасосных установок при напряжениях распределительной сети 6 (а) и 0,38 (б) кВ. 3.6. Электродвигатели станков-качалок. Для привода станков-качалок наибольшее применение получили асинхронные короткозамкнутые двигатели в закрытом обдуваемом исполнении серии 4А с синхронной частотой вращения вала 1500 об/мин с повышенным пусковым моментом ( Научно-производственным объединением «Элмаш» разработана специальная модифицированная серия асинхронных двигателей для привода станков-качалок серии 5А, АИР и др. с синхронной частотой вращения ротора от 500 до 1000 об/мин. Отличительными особенностями этой модификации двигателей являются: низкооборотные асинхронные двигатели для привода низкодебитных нефтяных скважин; двухскоростные асинхронные двигатели повышенной мощности, позволяющие применять станки-качалки при любой дебитности скважин; увеличенные пусковые моменты при невысоких кратностях пусковых токов; усиленный подшипниковый узел со стороны свободного конца вала, позволяющий выдерживать повышенные шкивовые нагрузки; климатические исполнения У1 и ХЛ1; встроенная температурная защита. С целью повышения коэффициента мощности на подстанциях, питающих СК, начали эксплуатировать на СК электроприводы с синхронными двигателями СДБ и СДБПК мощностью от 1,5 до 20 кВт и с частотой вращения 1500 об/мин. Кратность пускового момента Кп=1,2÷1,8, кратность максимального момента Кmax ≥ 1,7, пусковой ток Iп=(3,5-5)Iн. Несмотря на небольшую кратность входного момента, двигатели СДБ привода станка-качалки надежно втягиваются в синхронизм в период минимума нагрузки (при ходе плунжера вниз). Эти двигатели при номинальной нагрузке работают с cosφ=1, а при снижении нагрузки генерируют реактивную мощность, отдавая ее в сеть, повышая результирующий коэффициент мощности сети. 3.7. Системы управления электроприводами станков-качалок. Для управления двигателем станка-качалки применяются блоки управления серии БГШ (достаточно простые и надежные) на токи 15, 20, 40 и 100 А. Более современными являются блоки с микропроцессорным управлением БУС-3, БУС-4, СУС и др. Блоки управления выполняют следующие функции: пуск и отключение двигателя в ручном режиме; автоматическое отключение электродвигателя при обрыве одной из фаз; отключение электродвигателя при перегрузках, сверх допустимого предела; отключение электродвигателя при КЗ в его обмотках или кабеле; отключение электродвигателя при исчезновении или глубоком снижении напряжения и автоматический пуск электродвигателя при восстановлении напряжения в питающей сети после его кратковременного исчезновения или понижения с помощью реле времени; отключение электродвигателя при аварийном состоянии скважины. 3.8. Проблема самозапуска станка-качалки. При одновременном запуске нескольких станков-качалок пусковые токи складываются, что приводит к снижению напряжения на двигателях из-за его потери в проводах. Поэтому для обеспечения нормальной работы системы электроснабжения станков-качалок применяют 2 способа автоматического повторного включения (АПВ) двигателей станков-качалок после исчезновения или снижения напряжения: индивидуальный; групповой. При индивидуальном АПВ после восстановления номинального напряжения сети двигатель вновь подключается к ней с некоторой выдержкой времени. Для разных групп двигателей, питающихся от одного источника, создаются разные выдержки времени для предотвращения наложения пусковых токов. Наибольшая выдержка времени зависит от типа реле времени и составляет 14 и 20 сек. При групповом АПВ при исчезновении или глубоком снижении напряжения отключаются магистрали, к которым подключен двигатель на питающей подстанции. АПВ осуществляется включением магистрали в определенной последовательности с разными выдержками времени. 3.9. О регулируемом электроприводе станков-качалок. Станки качалки чаще всего относятся ко второй категории надежности электроснабжения. Однако в работах со сложными условиями эксплуатации эти установки относятся к первой категории, т.к. повторный пуск скважины может быть осложненным из-за образования песчаных пробок. Необходимость установления оптимального режима отбора жидкости в начале и в конце эксплуатации нефтяной скважины требует применения на станках-качалках регулируемого электропривода. Следует также иметь ввиду, что при большом содержании песка в откачиваемой жидкости после пуска скважины возникает необходимость увеличивать частоту качания. В настоящее время в большинстве случаев режим работы станка-качалки регулируется изменением длины хода плунжера насоса за счет перестановки пальцев на кривошипе или изменением числа ходов при помощи сменных шкивов на валу приводного электродвигателя, что связано с трудоемкостью работ и необходимостью остановки станка-качалки. Это приводит к потерям нефти, а иногда к образованию песчаных пробок и заклиниванию плунжера. Кроме того, при таком изменении режима откачки жидкости часто нарушается уравновешенность станка-качалки. Для обеспечения эксплуатации станка-качалки с регулируемым режимом работы могут быть использованы различные схемы электропривода. Для регулирования частоты вращения можно использовать двигатели постоянного тока (ДПТ), многоскоростные АД, СД с коробками передач или СД с постоянными магнитами (вентильные двигатели), или АД с частотным регулированием скорости вращения. Возможные принципиальные схемы регулируемого электропривода станков-качалок изображены на рис. 26. На рис. а изображена система тиристорного электропривода постоянного тока, состоящая из согласующего трансформатора ТС, управляемого выпрямителя УВ на тиристорах и неуправляемого выпрямителя В для питания ОВ приводного двигателя и системы управления, которая может предусматривать регулирование частоты вращения в широком диапазоне, а также автоматизацию управления приводом по заданной программе или в функции от какого-либо параметра режима работы установки. Недостатком схемы является низкий КПД из-за потерь в трансформаторе и выпрямителе и высокая стоимость. 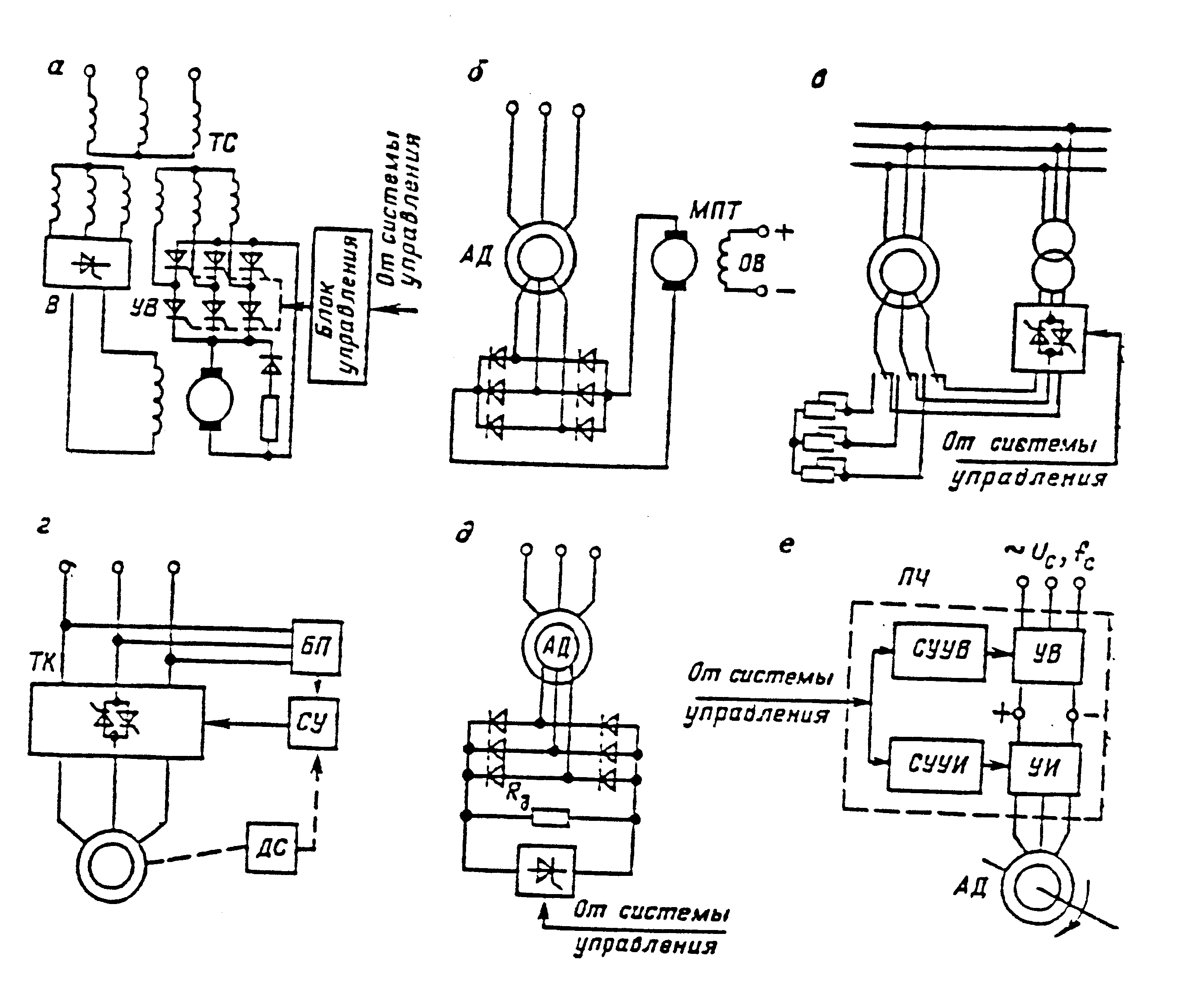 Рис. 26. Принципиальные схемы систем регулируемого электропривода станков-качалок. На рис. б изображен асинхронный вентильно-машинный электромеханический каскад, состоящий из АД с контактными кольцами и машины постоянного тока независимого возбуждения. В однокорпусном агрегате ротор АД и якорь машины постоянного тока с коллектором расположены на одном валу. Полюса машины постоянного тока и статор АД смонтированы на общей станине. Напряжение с обмотки ротора АД через контактные кольца подается через выпрямитель на якорь машины постоянного тока. Регулирование скорости вращения АД производится изменением тока возбуждения ДПТ. Входящая в электропривод станция управления обеспечивает регулирование частоты вращения от 430 до 1380 об/мин. На рис. в изображен асинхронный вентильный двухзонный каскад, обеспечивающий запуск и разгон двигателя до полусинхронной скорости посредством пускового реостата, а дальнейшее регулирование в диапазоне от 0,5 до 1,5 значения номинальной скорости осуществляется с рекуперацией энергии скольжения в питающую сеть через преобразователь частоты без выраженного звена постоянного тока в цепи ротора. Добавочная ЭДС регулируется изменением угла управления вентиля. На рис. г приведена схема силовой части регулируемого электропривода переменного тока по системе трехфазный тиристорный коммутатор – АД. Схема имеет диапазон регулирования D=1:1,5. Для получения необходимой жесткости характеристик и устойчивых значений пониженной частоты вращения предусмотрена обратная связь по скорости при помощи датчика скорости ДС, подающего сигнал на систему управления. Напряжение регулируется при помощи трехфазного тиристорного коммутатора ТК. На рис. д представлена система регулируемого тиристорного электропривода с импульсным управлением на базе АД с фазным ротором, которая предусматривает регулирование частоты вращения импульсным шунтированием сопротивления Rд в цепи выпрямленного тока ротора при помощи тиристорного коммутатора с гасящей цепью. Обратная связь по скорости обеспечивает достаточную жесткость характеристики в диапазоне регулирования частоты вращения D=1:2. Импульсный метод регулирования скорости производят периодически кратковременным изменением параметров двигателя. Требуемая скорость вращения обеспечивается в виде средней скорости. На рис. е представлена схема частотного управления АД с помощью преобразователя частоты со звеном постоянного тока и синусоидальной широкоимпульсной модуляцией выходного напряжения. УВ преобразует напряжение сети промышленной частоты в постоянное напряжение путем изменения величины угла управления тиристора, а управляемый инвертор УИ преобразует постоянное напряжение в трехфазное напряжение регулируемой частоты. Регулирование выпрямленного напряжения осуществляется при помощи СУУВ, а частота выходного напряжения задается блоком СУУИ. Перспективным для станков-качалок является регулируемый электропривод по системе полупроводниковый преобразователь частоты – асинхронный короткозамкнутый двигатель. В объединении «Татнефть» прошел производственные испытания преобразователь частоты с непосредственной связью. Недостатками этой разработки является недоиспользование мощности электродвигателя (60-70% установленной мощности) из-за принципиальной невозможности обеспечить на выходе частоту, близкую к частоте сети и сравнительно низкий коэффициент мощности. |