|
|
Стр_АСУТП_рем. Учебное пособие структура асутп блока т т1 Программа подготовки слесарей по ремонту и обслуживанию автоматики
2.7.2 ПТК АСР ТО
Программно-технический комплекс автоматизированной системы регулирования турбинного отделения предназначен для реализации управляющих, информационных, вспомогательных функций:
- автоматического регулирования технологических параметров;
- реализации технологических блокировок;
- индикации состояния автоматизированной системы регулирования и исполнительных механизмов на средствах представления информации БЩУ;
- сбора и первичной обработки информации о состоянии объектов автоматизации;
- формирования расчетных величин для других систем;
- подготовки и передачи в блочную управляющую вычислительную систему информации о состоянии АСР ТО, измерительных преобразователей и исполнительных механизмов;
- сбора, обработки данных и диагностики состояния и функционирования технических и программных средств ПТК АСР ТО;
- контроля достоверности и регистрации отказов источников входной информации;
- контроля реализации команд управления;
- обеспечения сервиса обслуживающему персоналу с помощью автоматизированных рабочих мест персонала;
- отладки технологических алгоритмов и программного обеспечения;
- коррекции настроечных параметров систем управления.
ПТК АСР ТО обеспечивает взаимодействие с высшими, по отношению к турбоустановке, системами (энергосистемой, системой управления и защит реактора, УВС, противоаварийной автоматики и др.). Внедрение ПТК АСР ТО обеспечивает повышение экономичности работы оборудования, увеличение выработки электроэнергии за счет оптимизации нестационарных режимов работы турбоустановки, повышения ее технической готовности и уменьшения вероятности ошибочных действий оператора.
Автоматизированная система регулирования ТО реализована на базе программно-технического комплекса, построенного по магистрально-модульному принципу с использованием локальных вычислительных сетей.
Структурная схема ПТК АСР ТО представлена на рисунке 37.
ПТК АСР ТО является двухуровневой системой. Нижний уровень системы реализует функции ввода/вывода информации, регулирования, управления и контроля, верхний уровень – загрузку программного обеспечения и контроль функционирования нижнего уровня, поддержку оперативной базы данных, представление необходимой информации на видеотерминалах автоматизированных рабочих мест, регистрацию и архивирование информации, передачу необходимой информации в УВС.
Функции нижнего уровня реализуются шкафами ШУ на базе технических средств ТСА М2002, функции ВУ – персональными ЭВМ промышленного исполнения и сетевыми средствами.
В состав шкафа управления входит набор функционально законченных модулей связи с объектом со встроенным дублированным интерфейсом и контроллеры управления со встроенным PC-совместимым микропроцессором.
Все модули ввода/вывода содержат высокопроизводительные микропроцессоры, предназначенные как для первичной обработки информации, так и для решения, при необходимости, функциональных задач.
Субблоки ввода/вывода обеспечивают:
- гальваническую развязку входных и выходных электрических сигналов;
- ввод и вывод дискретной и аналоговой информации.
Микроконтроллеры предназначены для выполнения следующих функций:
- решение функциональных задач;
- обмен информацией с верхним уровнем ПТК;
- обмен информацией с модулями связи с объектом;
- реализация функции диагностики технических и программных средств;
- связь с периферийными устройствами;
- реализация функции резервирования.
Обмен информацией микроконтроллера с модулями связи с объектом осуществляется дублированными каналами. Связь между нижним и верхним уровнями системы выполнена дублированной локальной вычислительной сетью типа Fast Ethernet.
В штатном режиме работы ШУ в работе находится один из двух микроконтроллеров, другой – в «горячем» резерве. При возникновении сбоев в работе основного микроконтроллера изменяются статусы основного и дублирующего микроконтроллеров. Связь между микроконтроллерами осуществляется дублированным интерфейсом.
В случае обнаружения неисправности в модуле, можно произвести его замену без нарушения работоспособности ШУ.
Для обеспечения заданных характеристик надежности по выполняемым функциям, модули одного этажного каркаса (крейта) дублируются модулями другого крейта.
ШУ обеспечивают выполнение управляющих функций:
- формирование на исполнительные механизмы управляющих воздействий;
- реализацию технологических блокировок автоматических регуляторов;
- реализацию технологических блокировок запорной арматуры, связанной с работой регуляторов;
- реализацию алгоритмов функционально-группового управления систем ПВД;
- синхронизацию нескольких, параллельно работающих исполнительных механизмов;
- контроль исправности первичных измерительных преобразователей и реализацию заданных алгоритмов управления при наличии их отказов;
- дистанционное управление исполнительными механизмами.
Верхний уровень ПТК АСР ТО включает в себя:
- два сервера, предназначенные для ведения базы данных (на энергоблоке №3 – один сервер);
- три автоматизированных рабочих места «Инструментальная система», предназначенных для управления функционированием узлов ПТК;
- автоматизированное рабочее место АСУТ, предназначенное для оперативного представления информации о работе системы персоналу, расположенное в помещении ЭК1203;
- два рабочих места ВИУТ (АРМ БЩУ);
- два сервера-шлюза, предназначенные для организации информационных каналов между ПТК АСР ТО и блочной УВС;
Все технические средства верхнего уровня ПТК АСР ТО объединены тремя локальными вычислительными сетями: двумя управляющими и одной информационной. Автоматизированные рабочие места и серверы подключены одновременно ко всем трем сетям. Шлюзы подключены к управляющим сетям и обеспечивают связь ВУ с ИВС. Управляющие сети предназначены для обмена технологической информацией между шкафами управления.
Первая управляющая сеть обеспечивает связь верхнего уровня ПТК с контроллерами, установленными в этажных каркасах «B» шкафов ШУ и СРТ. Вторая управляющая сеть обеспечивает связь верхнего уровня ПТК с контроллерами, установленными в этажных каркасах «D» шкафов ШУ и СРТ. Информационная сеть обеспечивает дополнительную резервную связь между ЭВМ, входящими в состав верхнего уровня ПТК АСР ТО, и позволяет обеспечить обмен данными между ними, не загружая первую и вторую сети и не создавая помех для работы шкафов ШУ и СРТ.
Для обеспечения надежности обмена информацией между шкафами управления, реализующими алгоритмы управления наиболее сложными технологическими объектами (регуляторы уровня в парогенераторах и регуляторы производительности ТПН), а именно ШУ-012, ШУ-013, ШУ-014 и ШУ-015, в системе предусмотрены дополнительные информационные каналы между микроконтроллерами указанных шкафов. Эти информационные каналы обеспечивают обмен технологической информацией между микроконтроллерами вне зависимости от загруженности управляющих сетей ПТК.
Шкафы управления функционируют под управлением операционной системы реального времени QNX v.6.2.1, автоматизированные рабочие места верхнего уровня ПТК АСР ТО – под управлением операционной системы Windows 2000.
ПТК СРТ в составе автоматизированной системы регулирования турбинного отделения энергоблока предназначен для управления паровпускными органами турбины в пусковых и эксплуатационных режимах. Функции нижнего уровня управления (ввод/вывод информации, автоматическое регулирование технологических параметров работы энергоблока, выдача управляющих воздействий на исполнительные устройства, контроль работоспособности и диагностика неисправностей технических и программных средств) обеспечивает шкаф управления ШУ-500-3.
Шкаф управления ШУ-500-3 представляет собой управляющий вычислительный комплекс, построенный на принципе дублированного РС-совместимого управляющего микроконтроллера и трехканальных устройств ввода/вывода. Структурная схема СРТ представлена на рисунке 38.
Входной информацией для системы регулирования турбины являются унифицированные токовые сигналы из системы теплотехнического контроля энергоблока, сигналы от датчиков угловой скорости турбоагрегата, измерительных трансформаторов тока и напряжения, характеризующих текущую электрическую мощность турбогенератора и дискретные сигналы от концевых выключателей запорно-регулирующей арматуры.
Выходными сигналами системы регулирования турбины являются управляющие команды в виде сигналов постоянного тока, подаваемые на электрогидравлические преобразователи, бесконтактные команды на исполнительные механизмы и дискретные команды типа «сухой контакт», подаваемые во внешние подсистемы АСУТП энергоблока.
Ввод/вывод информации осуществляется через клеммные соединители.
В шкафу предусмотрены четыре источника вторичного электропитания, подключенные к двум независимым фидерам сети надежного питания 220/380 В и формирующие на выходе стабилизированное постоянное напряжение 24 В. Два источника питания предназначены для обеспечения «обтекания» цепей дискретных сигналов типа «сухой контакт». Два других источника вторичного электропитания предназначены для обеспечения работы модулей связи с объектом и формирования тока релейной форсировки на электрогидравлические преобразователи в случае экстренного останова турбоагрегата.
Структурная схема организации трехканальной системы ввода/вывода и связи дублированных контроллеров с модулями связи с объектом представлена на рисунке 39.
Шкаф управления ШУ-500-3 содержит два модифицированных этажных каркаса (крейта), построенных по принципу (12+3):6. В каждом крейте предусмотрено:
- три посадочных места отведены для микроконтроллера (МК) и модуля контроля (КСК);
- по двенадцать посадочных мест для устройств ввода/вывода информации первого и второго каналов;
- по шесть посадочных мест для устройств ввода/вывода информации третьего канала.

Рисунок 37 – Структурная схема ПТК АСР ТО
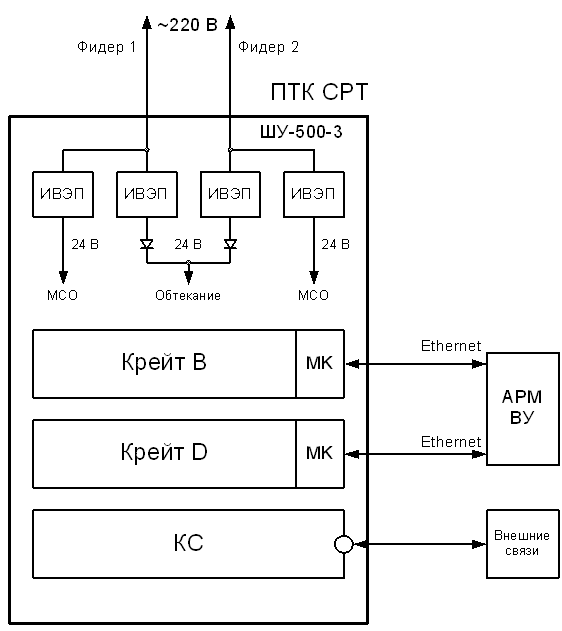
Рисунок 38 – Структурная схема СРТ
Управление турбоустановкой осуществляется оператором с БЩУ посредством операторской панели, программно реализуемой на мониторах АРМ БЩУ. Видеотерминалы АРМ БЩУ представляют собой жидкокристаллические плоскопанельные сенсорные мониторы. Управление режимами работы турбоустановки оператор осуществляет нажатием на программные кнопки пульта управления. Внешний вид программного пульта управления СРТ представлен на рисунке 40.
СРТ функционирует под управлением операционной системы реального времени, представляющей из себя многозадачное ядро в виде библиотеки системных функций. Основные функции операционной системы – организация вычислительного процесса в реальном времени, в том числе включение задач функционального ПО и управление ресурсами процессора.
Рисунок 39 – Внутренняя структура СРТ
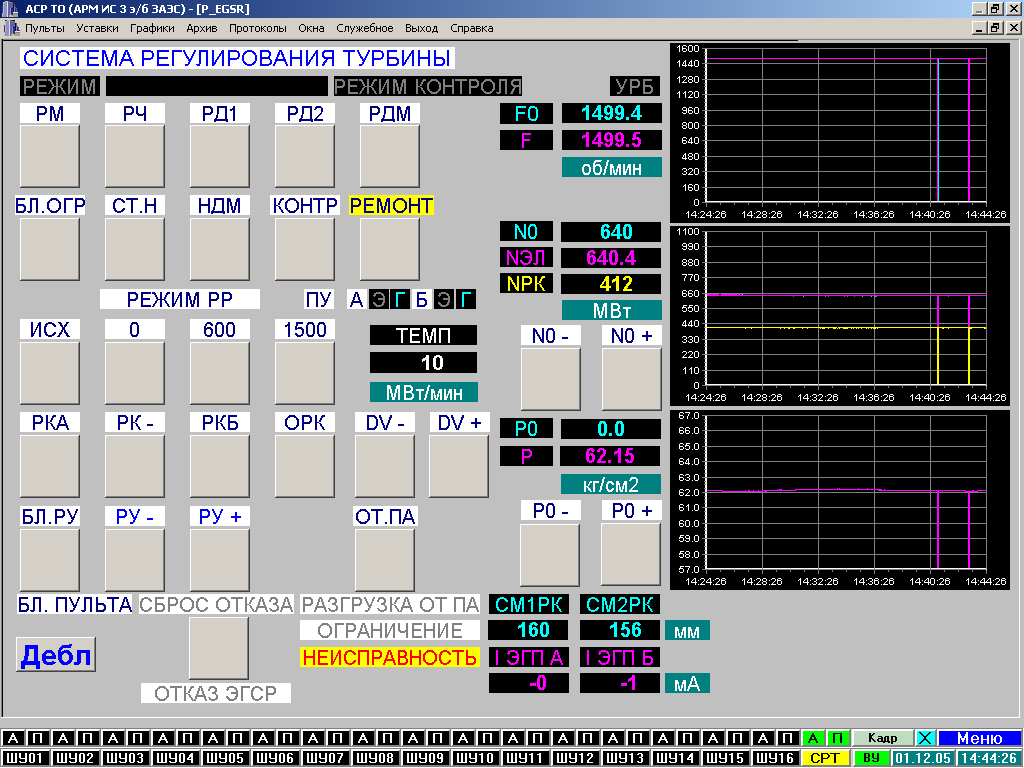
Рисунок 40 – Внешний вид операторской панели СРТ АРМ БЩУ
2.8 Система автоматического регулирования и дистанционного управления
Подсистемы дистанционного и автоматического управления осуществляют дискретное воздействие на электрифицированные приводы механизмов и запорно-регулирующей арматуры, которые расположены в различных, иногда значительно территориально удаленных участках энергоблока. Это воздействие может быть дистанционным с поста управления или автоматическим по заданным логическим программам.
2.8.1 Система автоматического регулирования
Общей задачей автоматического регулирования является поддержание оптимальных условий протекания технологического процесса без участия человека.
Система автоматического регулирования включает в себя следующие основные понятия:
- объект или участок регулирования;
- регулируемая величина;
- регулирующий орган;
- измерительное устройство;
- усилительное устройство;
- задающее устройство.
При этом измерительное устройство или усилительное, совместно с задающим устройством, образуют непосредственно регулятор. Объект регулирования, регулирующий орган и регулятор образуют систему регулирования.
Автоматические системы регулирования выполнены на базе аппаратуры «Каскад-2», которая выполнена на основе микроэлектроники в приборном исполнении. В качестве основных источников информации используются первичные преобразователи типа «Сапфир-22», термопреобразователи сопротивления и термоэлектрические термо-преобразователи совместно с нормирующими преобразователями.
Система дистанционного управления включает в себя исполнительный или приводной механизм (электропривод, пневмопривод, гидропривод), предназначенный для пере-мещения запорного или регулирующего органа, и совокупность устройств, предназначен-ных для управления приводным механизмом (ключи управления, индикаторы положения, блоки управления, пусковые устройства электродвигателей, автоматические выключатели и т.п.).
Обобщенная схема автоматической системы регулирования приведена на рисунке 41. Информация о значении регулируемого параметра в виде нормированного сигнала 0÷5 мА постоянного тока поступает из измерительного преобразователя технологического параметра (ИПТП). Сигнал сравнивается в сравнивающем устройстве (ЭС) с заданным значением. При наличии разбаланса между заданным и текущем значениями регулируемого параметра, на выходе сравнивающего устройства формируется сигнал, пропорциональный их разности. Разностной сигнал поступает на вход регулирующего прибора (РП), в котором он обрабатывается по соответствующему алгоритму и формируются управляющие команды. Команды управления через усилительные каскады поступают исполнительный механизм (ИМ), приводящий в движение регулирующий орган (РО). Регулирующий орган, перемещаясь по командам от регулирующего прибора, изменяет параметры регулируемого аппарата (РА), постепенно сводя к нулевому значению разбаланс регулятора.
В зависимости от динамических характеристик регулируемого объекта и технологических требований к характеру переходных процессов в автоматических системах регулирования могут реализовываться следующие законы регулирования:
- позиционный;
- пропорциональный (статический);
- интегральный (астатический);
- пропорционально–интегральный;
- пропорционально–интегрально–дифференциальный.
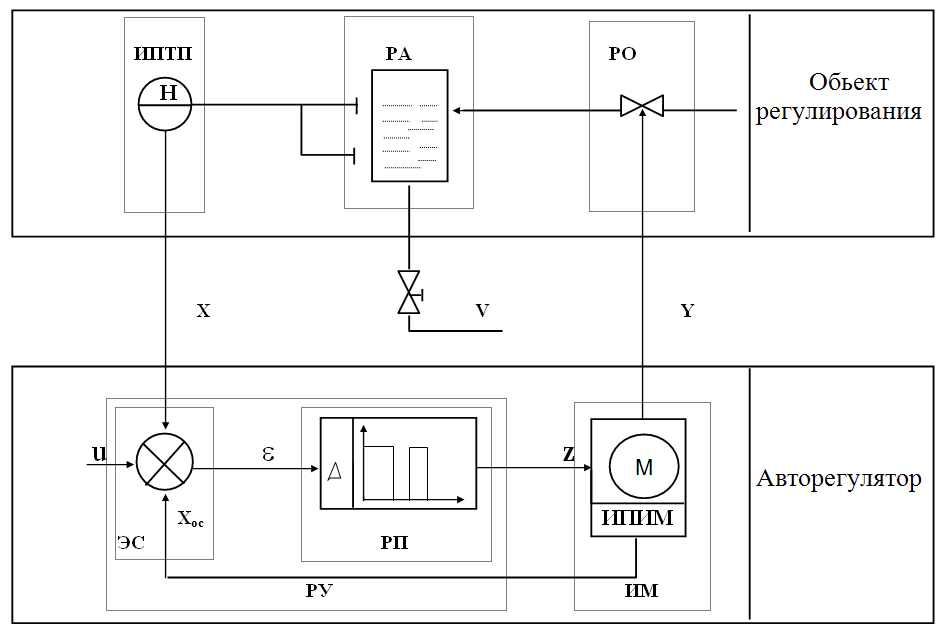
Рисунок 41 – Структурная схема системы автоматического регулирования
Позиционное регулирование характеризуется дискретным изменением выходного сигнала в зависимости от изменения регулируемого параметра (включение, отключение нагревателей в компенсаторе давления).
Пропорциональные регуляторы (П–регуляторы) оказывают воздействие «Y» на регулирующий орган пропорционально отклонению регулируемой величины «Х». При этом изменение положения регулирующего органа пропорционально изменению регулируемого параметра.
Интегральные регуляторы (И–регуляторы) оказывают воздействие на регулирующий орган пропорционально интегралу от отклонения регулируемой величины, т.е. изменение положения регулирующего органа зависит от значения отклонения регулируемого параметра и времени воздействия отклонения.
Пропорционально–интегральные регуляторы (ПИ–регуляторы) оказывают воздействие на регулирующий орган пропорционально отклонению и интегралу от отклонения регулируемой величины.
Пропорционально–интегрально – дифференциальные регуляторы (ПИД–регуляторы) оказывают воздействие на объект регулирования пропорционально отклонению регулируемой величины, интегралу от этого отклонения и скорости изменения регулируемой величины.
В конструкции аппаратуры «Каскад-2» используется блочно-модульный принцип. Блоки аппаратуры имеют индивидуальные источники питания и, в зависимости от используемых модулей, могут выполнять различные функции. В регулирующих устройствах авторегуляторов используются следующие блоки:
Р27 – блок регулирующий;
А05 – блок суммирования и ограничения сигналов;
А06 – блок ограничения и размножения сигнала;
А35 – блок вычислительных операций;
Д05 – блок динамических преобразований;
Д07 – блок интегрирования;
Л03 – блок аналого-релейного преобразования;
Н05 – блок нелинейных преобразований.
В качестве примера построения авторегулятора рассмотрим структурную схему автоматического регулятора, представленную на рисунке 42.
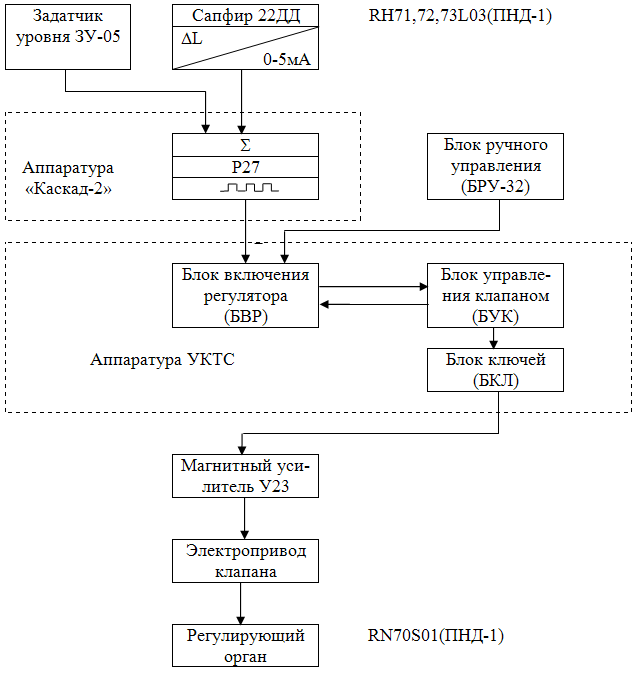
Рисунок 42 – Структурная схема авторегулятора
В качестве задающих устройств в системах авторегулирования на энергоблоках ОП ЗАЭС применяются модули ЗУ11 и ЗУ05. Задающее устройство ЗУ11 состоит из потенциометра с шкалой указателя положения подвижного контакта от минус 100 до 100 %. Задающее устройство ЗУ05 состоит из установленных в общем корпусе источника питания и регулируемого источника постоянного тока. На задней части корпуса ИП находится штепсельный разъем для подключения к цепям питания и выходным цепям. На передней панели устройства размещена ручка «Задание», при помощи которой перемещается подвижный контакт реохорда и устанавливается выходной ток устройства.
Регулирующий блок Р27 выполняет следующие функции:
1) гальваническое разделение входных и выходных цепей, а также входных цепей друг от друга;
2) введение задания регулируемой величины;
3) суммирование унифицированных входных сигналов постоянного тока, формирование сигнала отклонения регулируемой величины от заданного значения (формирование сигнала рассогласования);
4) демпфирование сигнала отклонения (сигнала рассогласования);
5) формирование выходного импульсного электрического сигнала для воздействия на управляемый процесс в соответствии с одним из следующих законов регулирования:
а) пропорциональный совместно с датчиком положения исполнительного механизма (использовании жесткой отрицательной обратной связи по положению ИМ);
б) пропорционально-интегральный совместно с исполнительным механизмом;
в) пропорционально-интегрально-дифференциальный совместно с исполнительным механизмом;
г) трехпозиционный или двухпозиционный;
6) индикацию выходного сигнала;
7) введение запрета на управление нагрузкой.
Система работает следующим образом – сигнал от задающего устройства параметра в виде унифицированного сигнала 0-5 мА подается на вход суммирующего устройства, которое входит в состав регулирующего блока (регулятора) Р27 (аппаратура «Каскад-2»). Одновременно на другой вход суммирующего устройства подается сигнал обратной связи от измерительного преобразователя, измеряющего текущее значение регулируемого параметра.
Сравнивающее устройство может производить не только суммирование, но и вычитание. Из сигнала задатчика вычитается сигнал текущего значения регулируемого параметра. В результате на выходе суммирующего устройства формируется сигнал рассогласования (положительный или отрицательный) который в дальнейшем преобразуется в сигнал управления регулирующего блока Р27.
Поскольку все исполнительные механизмы регуляторов имеют асинхронный двигатель переменного тока, скорость вращения которого постоянна, то сигнал управления от регулятора Р27 представляет собой последовательность импульсов управления и пауз между ними. Чем длиннее импульс управления, тем на большую величину перемещается исполнительный механизм. Длительность импульсов управления пропорциональна величине сигнала рассогласования на входе регулятора.
Далее сигнал управления от регулятора поступает на логическую схему управления, которая предназначена для перевода с автоматического управления исполнительным механизмом на дистанционное (ручное) и наоборот.
Указанную функцию выполняет аппаратура УКТС (блок включения регулятора – БВР).
Непосредственное переключение «автомат-ручное» исполнительного механизма производится оператором с помощью блока ручного управления (БРУ-32), в состав которого входит ключ переключения и кнопки дистанционного управления «БОЛЬШЕ» и «МЕНЬШЕ». Кроме того в блоке БРУ-32 предусмотрено устройство индикации прохождения сигналов автоматического управления на исполнительный механизм и индикатор положения исполнительного механизма. Воздействие от ключа переключения «автомат-ручное», также передаются на блок БВР.
В состав логической схемы управления также входит блок управления каналом (БУК), выполненный на аппаратуре УКТС и формирующий команды на открытие и закрытие регулирующего органа в виде сигналов напряжением 15 В постоянного тока. В БУК также поступает информация от концевых выключателей исполнительного механизма. При полном открытии регулирующего органа запрещается прохождение команд «больше» и полном закрытии – команд «меньше». Далее от БУК команды поступают на блок ключей (БКЛ), выполненный также на аппаратуре УКТС.
БКЛ является усилителем сигнала управления и предназначен для выдачи команд управления на магнитные усилители или магнитные пускатели при электроприводах большой мощности. БКЛ представляют собой тиристорные ключи, коммутирующие, постоянный или переменные токи напряжением =220 В и
380 В.
Магнитные усилители, исполнительные автоматы и магнитные пускатели выдают команды непосредственно на электродвигатели привода регулирующих органов воздействующих на объект регулирования.
Значение регулируемого параметра принимается первичным измерительным преобразователем. Таким образом, контур регулирования замыкается.
Основными отличиями отдельных систем регулирования являются различные измерительные преобразователи, различные характеристики исполнительных механизмов и настройки регулирующего блока, которые определяются характеристиками объекта регулирования.
|
|
|
 Скачать 11.01 Mb.
Скачать 11.01 Mb.