ответы на вопросы синхронные машины. Устройство и принцип действия синхронной машины
 Скачать 1.44 Mb. Скачать 1.44 Mb.
|

Синхронные режимы параллельной работы синхронных машинРежим работы синхронной машины параллельно с сетью при синхронной частоте вращения называется синхронным. Рассмотрим включенную на параллельную работу неявнополюсную машину, пренебрегая активным сопротивлением фаз обмотки якоря (  ). ).Ток обмотки якоря будет равен Изменение реактивной мощности. Режим синхронного компенсатора. В случае, если выполнены все условия включения генератора на параллельную работу, ток якоря равен нулю, машина работает на холостом ходу. Если ток возбуждения генератора после синхронизации увеличен, то  , и возникает ток , и возникает ток  , отстающей от , отстающей от  на 90 эл.град. (рис.3.23,а). Машина будет отдавать в сеть индуктивный ток и реактивную мощность. Если ток возбуждения генератора уменьшить, то на 90 эл.град. (рис.3.23,а). Машина будет отдавать в сеть индуктивный ток и реактивную мощность. Если ток возбуждения генератора уменьшить, то  , возникает опережающий ток относительно , возникает опережающий ток относительно  и и  (рис.3.23,б). Машина будет отдавать в сеть емкостной ток и потреблять из сети реактивную мощность. (рис.3.23,б). Машина будет отдавать в сеть емкостной ток и потреблять из сети реактивную мощность.С 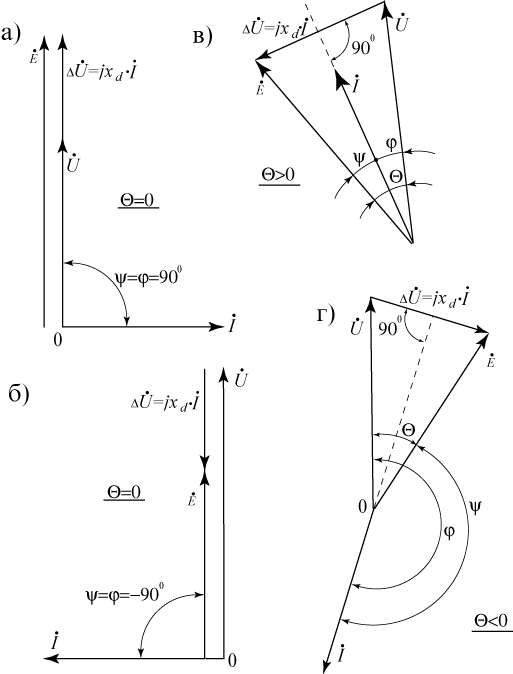 инхронная машина не несущая активную нагрузку и загруженная реактивным током называется синхронным компенсатором. инхронная машина не несущая активную нагрузку и загруженная реактивным током называется синхронным компенсатором.Изменение активной мощности. Режим генератора и двигателя. Чтобы включенная на параллельную работу машина вырабатывала активную мощность, работала в режиме генератора, необходимо увеличить механический вращающий момент на валу (рис.3.23,в). При этом возникает ток , отстающий от  на на  . Значение активной мощности генератора равно . Значение активной мощности генератора равноЕсли, наоборот, притормозить ротор машины, создав на его валу механическую нагрузку, то ЭДС  будет отставать от будет отставать от  на угол на угол  , ток , ток  от - на угол от - на угол  (рис.3.23,г). При этом активная мощность будет равна (рис.3.23,г). При этом активная мощность будет равна  , машина будет работать в режиме двигателя, потребляя активную мощность из сети. , машина будет работать в режиме двигателя, потребляя активную мощность из сети.Синхронный компенсаторСинхронные компенсаторы предназначены для повышения коэффициента мощности сети и поддержания нормального уровня напряжения сети в районах сосредоточения потребительских нагрузок. Нормальным является перевозбужденный режим работы синхронного компенсатора, когда он отдает в сеть реактивную мощность. Синхронные компенсаторы не имеют приводных двигателей и поэтому сами являются синхронными двигателями, работающими на холостом ходу, при этом из сети потребляя небольшую активную мощность для покрытия своих потерь. Пуск синхронных компенсаторов осуществляется также, как и синхронных двигателей. Так как у синхронного компенсатора не ставится вопрос статической устойчивости, они выполняются с малым воздушным зазором, что позволяет облегчить обмотку возбуждения и уменьшить стоимость машины. Регулирование активной мощности синхронной машины, включенной в сеть  После включения в сеть методом точной синхронизации синхронная машина работает в режиме холостого хода (I1 =0). ЭДС Eo находится в противофазе с напряжением сети Uc (рис. 5.33, а). Для того, чтобы синхронная машина отдавала в сеть активную мощность, необходимо увеличить внешний момент на валу Мвн в направлении вращения ротора. Тогда ротор начнет ускоряться. Вектор Ёo сместится на угол Θ в направлении вращения ротора и возникнет ЭДС ΔE=Eo+Uc, под действием которой потечет ток После включения в сеть методом точной синхронизации синхронная машина работает в режиме холостого хода (I1 =0). ЭДС Eo находится в противофазе с напряжением сети Uc (рис. 5.33, а). Для того, чтобы синхронная машина отдавала в сеть активную мощность, необходимо увеличить внешний момент на валу Мвн в направлении вращения ротора. Тогда ротор начнет ускоряться. Вектор Ёo сместится на угол Θ в направлении вращения ротора и возникнет ЭДС ΔE=Eo+Uc, под действием которой потечет токПри этом вектор напряжения синхронной машины сохранит свое положение в противофазе с вектором напряжения сети Uс Проекция тока статора I1; на напряжение U1 положительна, а на напряжение Uc отрицательна, поэтому активная мощность. P1=mU1I1cosφ = mU1Iα будет вырабатываться синхронной машиной в отдаваться в сеть. Синхронная машина работает в режиме генератора. Соответствующий активной мощности электромагнитный момент будет девствовать против направления вращения ротора. При равенстве моментов увеличение угла в прекратится и ротор вновь будет вращаться с синхронной частотой.Если к валу двигателя приложить внешний момент в направлении против вращения ротора, то ротор начнет тормозиться. Вектор E0 сместится на угол Θ в отрицательном направлении (против направления вращения). Под действием возникшей ЭДС ΔЕ = Ёо + Uс потечет ток проекция которого на вектор напряжения синхронной машины U1 будет отрицательной, а на вектор напряжения сети Uс - положительной (рис. 5.33, в). Следовательно, направление потока активной мощности изменится на обратное. Синхронная машина переходит в режим двигателя, потребляя из сети активную мощность. Развиваемый ею электромагнитный момент будет действовать в направлении вращения ротора. При равенстве моментов Ме = Мвн торможение ротора прекратится, и он вновь будет вращаться с синхронной частотой. Таким образом, синхронная машина обладает свойством саморегулирования (автоматического поддержания синхронной частоты вращения). Регулирование реактивной мощности синхронной машины, включенной в сеть Регулирование реактивной мощности в энергосистемах имеет такое же важное значение, как и регулирование активной мощности. Реактивная мощность необходима для создания магнитных полей во многих электротехнических устройствах, работающих в энергосистеме. Регулирование реактивной мощности позволяет повысить перегрузочную способность этих устройств, поддерживать постоянство напряжения в сети, снизить ее перетоки по линиям и тем самым обеспечить устойчивую и экономичную работу энергосистемы. Вернемся вновь к режиму холостого хода синхронной машины (рис. 5.34, а). 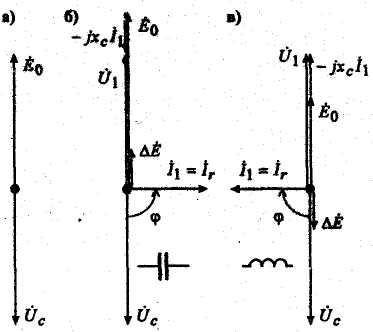 В том режиме по обмотке возбуждения протекает ток If = Ifo, соответствующий по В том режиме по обмотке возбуждения протекает ток If = Ifo, соответствующий похарактеристике холостого хода напряжению сети Uc = Eo . Увеличим ток возбуждения If, тогда модуль ЭДС Eo возрастет и возникнет ток 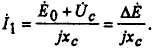 По отношению к напряжению синхронной машины U1 ток I1 будет индуктивным, а по отношению к напряжению сети Uc - емкостным (рис. 5.34, б), поэтому синхронная машина вырабатывает и отдает в сеть реактивную мощность Таким образом, изменение тока возбуждения синхронной машины обуславливает изменение в обмотке якоря реактивного тока и, следовательно, происходит регулирование реактивной мощности. Синхронная машина, загруженная только реактивным током и не несущая активной нагрузки, называется синхронным компенсатором. 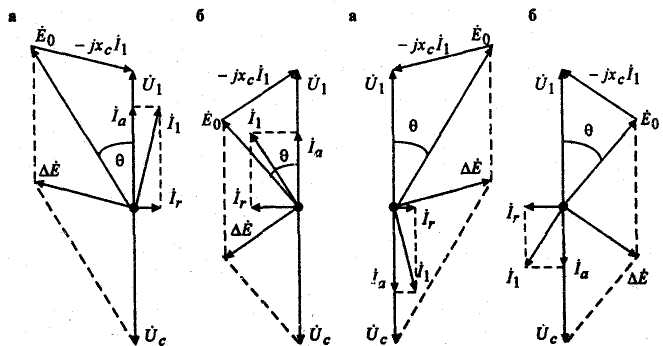 Регулирование реактивной мощности возможно при работе синхронной машины в режимах генератора и двигателя. Согласно векторным диаграммам (рис. 5.35), в генераторном режиме при увеличении тока возбуждения (рис. 5.35, а) синхронная машина отдает в сеть реактивную мощность, а при уменьшении тока возбуждения (рис. 5.35, б) потребляет из сети реактивную мощность. Регулирование реактивной мощности возможно при работе синхронной машины в режимах генератора и двигателя. Согласно векторным диаграммам (рис. 5.35), в генераторном режиме при увеличении тока возбуждения (рис. 5.35, а) синхронная машина отдает в сеть реактивную мощность, а при уменьшении тока возбуждения (рис. 5.35, б) потребляет из сети реактивную мощность.Аналогичные явления имеют место и в двигательном режиме (рис. 5.36). Рис 5.35 рис 5.36 Угловая характеристика синхронной машины Угловой характеристикой синхронной машины называют зависимость Р1 = f(Θ) при постоянных токе возбуждения, напряжении и частоте сети (If = const, Uc = const, fc = const). Знание этой характеристики позволяет установить ряд важных свойств синхронной машины, определяющих устойчивость ее работы параллельно с сетью. Найдем эту зависимость для синхронной машины с явнополюсным ротором, полагая, что сопротивление якоря равно нулю (ra= 0) и машина не насыщена. Активная мощность синхронной машины определяется выражением Д 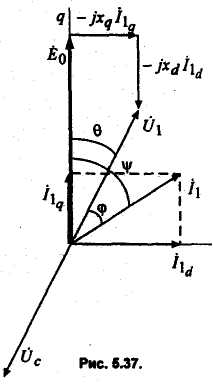 ля преобразования этого выражения в искомую зависимость Р1 = f(Θ) воспользуемся векторной диаграммой синхронной машины, включенной в мощную сеть с напряжением Uс = const и fс = const и работающей в режиме генератора с выдачей реактивной мощности в сеть (рис. 5.37). ля преобразования этого выражения в искомую зависимость Р1 = f(Θ) воспользуемся векторной диаграммой синхронной машины, включенной в мощную сеть с напряжением Uс = const и fс = const и работающей в режиме генератора с выдачей реактивной мощности в сеть (рис. 5.37). Согласно векторной диаграмме φ=ψ-Θ С учетом этого соотношения выражение для активной мощности преобразуется к виду Учитывая, что выразим активную мощность через продольную I1d и поперечную I1q составляющие тока якоря: Из векторной диаграммы находим выражения для продольной I1d. и подаренной I1q составляющих тока якоря: Подставляя эти выражения в формулу для активной мощности, получим Е 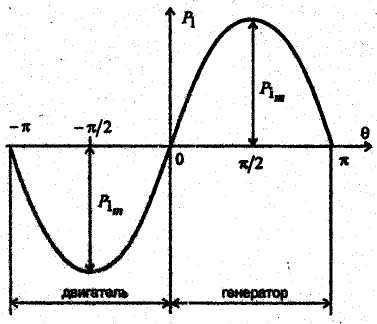 сли синхронная машина имеет неявнололюскый ротор (xd = xq), то второе слагаемое обращается в нуль и сли синхронная машина имеет неявнололюскый ротор (xd = xq), то второе слагаемое обращается в нуль иС рис 5.38 огласно этому выражению угловая характеристика неявнополюсной машины является синусоидальной функцией угла Θ (рис. 5.38). При Θ > 0 мощность Р1 > 0, машина работает в генераторном режиме. При Θ<0 мощность Р1 <0, машина работает в режиме двигателя. При Θ= ±π/2 синхронна машина развивает максимальную по модулю мощность 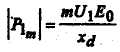 Величина максимальной мощности Р1m прямо пропорциональна току возбуждения If (определяющему ЭДС Ео) и обратно пропорциональна полному индуктивному сопротивлению якоря по продольной оси xd. При проектировании синхронной машины сопротивление xd выбирают так, чтобы при номинальном токе возбужденна If = Ifн кратность максимального момента была не менее 1,7  Выражение для угловой характеристики Р1 = f(0) явнополюсной синхронной машины содержит составляющую, зависящую от sin2Θ (рис. 5.39). Эта составляющая обусловлена магнитной несимметрией ротора и появлением в связи с этим в явнополюсной машине чисто магнитного вращающего момента из-за стремления ротора ориентироваться по оси магнитного поля (подобно магнитной стрелке компаса) Этот эффект существует даже при отсутствии возбуждения (Ео=0). Синхронные машины, работающие без возбуждения, называются реактивными. Они имеют небольшую мощность (несколько киловатт). С целью повышения мощности в них стремятся конструктивными мерами увеличить разницу между сопротивлениями xd и xq, так чтобы отношение xd/xq =3-4. В синхронных машинах нормального исполнения отношение xd/xq ≈1,5. Поэтому амплитуда второй гармоники мощности не превышает 25% от амплитуды первой гармонической составляющей. U-образные характеристики Для анализа свойств синхронной машины, работающей параллельно с сетью, наряду с угловой характеристикой Р1 = f(Θ) важное значение имеют U-образные характеристики, представляющие зависимость тока якоря в функции тока возбуждения I1 =f(If) при постоянных активной мощности, напряжении и частоте сети (Р1= const, Uc= const, fc = const). U-образные характеристики могут быть построены с помощью векторных диаграмм, учитывающих насыщение стали. На рис. 5.41 приведены векторные диаграммы неявнополюсного синхронного генератора (τа = 0). В соответствии с условием Р1 =m1U1I1 cosφ = const активная составляющая тока якоря поэтому концы вектора тока I1 будут лежать на линии I, перпендикулярной вектору напряжения U1, а концы вектора результирующей ЭДС 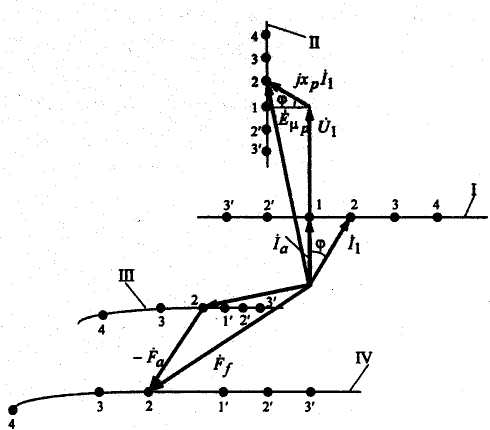 будут лежать на линии П, параллельной вектору напряжения. Цифрами на этих линиях отмечены расчетные точки U-образной характеристики для мощности Р1, соответствующей току Ia =0,8о.е. Модуль ЭДС Eμr определяет по характеристике холостого хода суммарную МДС Fμ. Вектор Fμ опережает ЭДС Eμr на 90°. Вычитая из него вектор МДС реакции поля Fa, находим вектор МДС обмотки возбуждения и соответствующий ему ток возбуждения Полученная таким образом зависимость I1=f(If) представлена на рис. 5.42 с отмеченными на ней расчетными точками. Аналогично производится построение U-образных характеристик для других значений активной мощности. Минимумы U-образных характеристик соответствуют активным составляющим тока якоря, поэтому линия, соединяющая минимумы, представляет собой регулировочную характеристику генератора при cosφ = 1. Точки U-образной характеристики, лежащие правее ее минимума, соответствуют режиму перевозбуждения, а левее - режиму недовозбуждения. В режиме перевозбуждения ток якоря I1 отстает от напряжения U1, машина отдает в сеть реактивную мощность (Q1 > 0). В режиме недовозбуждения ток I1 опережает вектор напряжения U1, синхронная машина потребляет из сети реактивную мощность (Q1 < 0). 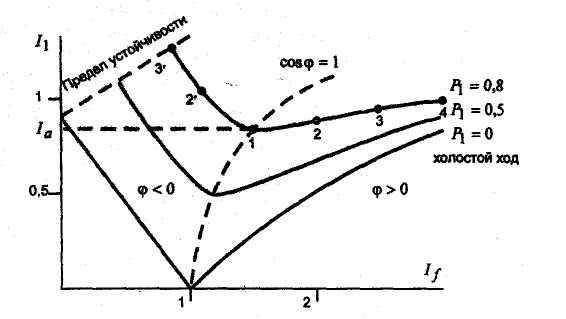 Минимальное значение тока возбуждения ограничивается пределом статической устойчивости генератора Р1m= , равным мощности Р1, при которой построена U-образная характеристика. Максимальная величина тока определяется допустимым перегревом обмотки возбуждения. |