Всепреобразования структурной схемы объекта привести в пояснительной записке
 Скачать 196.25 Kb. Скачать 196.25 Kb.
|

|
Министерство науки и высшего образования Российской Федерации Федеральное агентство по образованию ГОУ ВПО «Магнитогорский Государственный Технический Университет им. Г.И. Носова» РАСЧЁТНО-ГРАФИЧЕСКАЯ РАБОТА по курсу «Теория автоматического управления» Вариант 4.1.1 Выполнил: Студент гр АНб-18-1 Муродов Г. А. Проверил: доц. каф. ЭиМЭ канд. техн. наук Пишнограев Р. С. Магнитогорск – 2020 СОДЕРЖАНИЕ Задание Определение передаточной функции объекта по управляющему воздействию WОБ(p) Определение передаточной функции объекта по управляющему воздействию Wf(p) Определение устойчивости объекта управления при помощи алгебраического критерия Синтез регулятора WP(p) Проверка устойчивости САУ графическим критерием Определение коэффициента ошибки системы при линейно изменяющемся управляющем воздействии Библиографический список ЗАДАНИЕ Полагая WР(р) = 1 и WОС(р) = 0, привести в общем виде: WОБ(р) – передаточную функцию объекта управления по управляющему воздействию x; Wf(p) – передаточную функцию объекта управления по возмущающему воздействию f. Всепреобразования структурной схемы объекта привести в пояснительной записке. При известных типах и параметрах W1(p)..W4(p) определить характер устойчивости объекта по управляющему воздействию с помощью любого алгебраического критерия. При WОС(р) = 1 выполнить синтез регулятора WР(р) для обеспечения астатизма системы первого порядка и запаса устойчивости системы управления, не менее φз = 30º. Проверить устойчивость полученной системы управления (с учётом регулятора) любым графическим критерием. Показать на графиках запас устойчивости по амплитуде КЗ и фазе φз. Определить We(р) – передаточную функцию объекта управления и регулятора по ошибке регулирования в общем виде. Всенеобходимыепреобразования структурной схемы объекта привести в пояснительной записке. При известных типах и параметрах W1(p)..W4(p) и WР(р) определить коэффициент ошибки и показать степень астатизма системы.  Рисунок 1 – Вариант 4 структурной схемы системы управления. Таблица 4 – Параметры передаточных функций объекта управления
1. ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ОБЪЕКТА ПО УПРАВЛЯЮЩЕМУ ВОЗДЕЙСТВИЮ WОБ(p) На рисунке 4 показана исходная структурная схема исследуемой системы управления. Согласно принципу суперпозиции, определение передаточной функции системы по управляющему воздействию x осуществляется при отсутствии возмущающего воздействия f [1]. На основании данного принципа с учётом условий задания WР(р) = 1 и WОС(р) = 0 исходная структурная схема рисунка 2 преобразуется в структурную схему, показанную на рисунке 3. Рисунок 2 – Исходная структурная схема системы автоматического управления 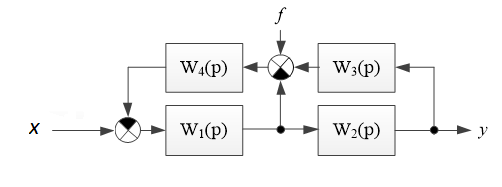 Рисунок 3 – Структурная схема системы автоматического управления с учётом условий задания и принципа суперпозиции 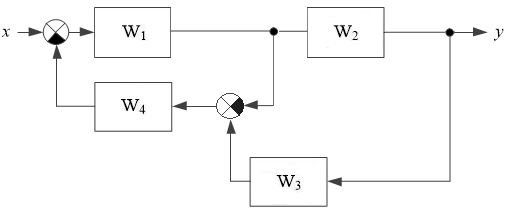     Выполним необходимые подстановки в выражение и данных таблицы 1  Выполним необходимые подстановки в данное выражение с учётом данных таблицы.   |


