Практическое занятие №1. Занятие 1 Технологии в составе беспилотного транспортного средства
 Скачать 109.58 Kb. Скачать 109.58 Kb.
|

|
Практическое занятие №1 Технологии в составе беспилотного транспортного средства Цель занятия: изучить технологии используемые при проектировании и эксплуатации беспилотного подвижного состава Как представлено на рисунке 1, Беспилотное транспортное средство (далее – БТС) представляет собой не одну технологию, а сложную систему технологий, состоящую из множества подсистем. Итак, разобьем их на три основные группы: алгоритмы сенсорного сканирования, восприятия и принятия решений (требующие, как правило, построения сложных логических выводов); клиентские системы, включая операционную систему и аппаратную платформу; и облачные платформы, в том числе создание карт высокой четкости (HD-карт), обучение моделей глубокого обучения, моделирование и хранение данных. Первая подсистема отвечает за извлечение важной информации из необработанных данных, полученных сенсорами, и обеспечивает исследование роботом окружающей среды, на чем в дальнейшем строится принятие решений относительно его будущих действий. Клиентские системы объединяют алгоритмы первой подсистемы, тем самым позволяя им работать в режиме реального времени и обеспечивая надежность. Например, если камера генерирует данные с частотой 60 Гц, клиентским системам необходимо убедиться, что самый длинный этап обработки занимает менее 16 мс. Платформа облачных вычислений отвечает за автономные вычисления и хранение данных. С ее помощью мы можем тестировать новые алгоритмы, обновлять HD-карты и обучать БТС более качественным моделям распознавания, отслеживания и принятия решений. 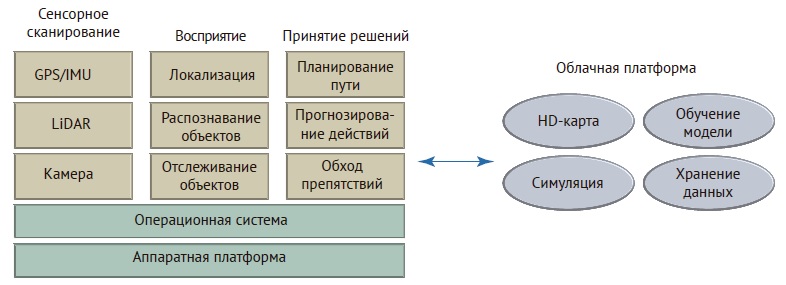 Рисунок 1 – Обзор архитектуры БТС Алгоритмы БТС. Алгоритмы БТС включают в себя: сенсорное сканирование окружающей среды, т. е. извлечение важной информации из необработанных данных, полученных датчиками; восприятие, сущность которого заключается в локализации транспортного средства и исследовании окружающей среды; и принятие решений, другими словами, принятие мер, обеспечивающих надежное и безопасное достижение транспортным средством пункта назначения. Сбор данных об окружающей среде (сенсорное сканирование). Обычно на борту БА располагается несколько основных сенсоров. Каждый из них имеет свои преимущества и недостатки, поэтому – из соображений надежности и безопасности – сенсоры работают в совокупности. Рассмотрим их виды: - GPS/IMU: система GPS/IMU обеспечивает локализацию (вычисление пространственных координат) БТС, сообщая данные инерциальной системы и глобальную оценку местоположения с высокой частотой (примерно 200 Гц). GPS – довольно точная система, но она имеет низкую частоту обновления (всего около 10 Гц) и поэтому не может предоставлять информацию в режиме реального времени. Что касается IMU, у таких сенсоров наблюдается тенденция накопления погрешностей, что впоследствии приводит к ухудшению оценок местоположения. Но зато IMU может предоставлять обновления чаще, с частотой 200 Гц или выше. Комбинируя GPS и IMU, мы можем предоставлять точные данные о местоположении транспортных средств в реальном времени; - LiDAR: лидар используется для обзора местности, определения местоположения и обхода препятствий. Способ его работы заключается в том, что за счет отражения луча от окружающих предметов он измеряет время прохождения луча и вычисляет расстояния до них. Благодаря высокой точности лидар применяется для создания HD-карт, определения местоположения движущегося транспортного средства на HD-картах, обнаружения препятствий и многого другого. Обычно блок лидара, такой как 64-лучевой лазер Velodyne, вращается с частотой 10 об/мин и осуществляет около 1,3 млн считываний в секунду; - Камеры: в основном камеры используются для отслеживания и распознавания объектов, а также для решения задач типа выбора полосы движения, обнаружения светофоров, людей на путях и т. д. Обычно камеры работают с частотой 60 Гц и в совокупности генерируют около 1,8 Гб необработанных данных в секунду; - Радар и сонар: радар и сонар используются в качестве последней линии обороны при обнаружении препятствий. Данные, получаемые этими датчиками, показывают расстояние до ближайшего объекта, а также его скорость. Как только БА обнаруживает, что приближается к какому-либо объекту и возникает опасность столкновения, он тормозит, чтобы избежать столкновения. Следовательно, данные, генерируемые радаром и сонаром, практически не требуют обработки и обычно поступают непосредственно в процессор управления, что позволяет реализовать «экстренное» торможение Восприятие. Далее данные с сенсоров передаются на стадию восприятия. Три основных задачи этапа восприятия – это локализация, обнаружение и отслеживание объекта. Для локализации можно использовать связку GPS/IMU, и, как упоминалось выше, GPS обеспечивает довольно точную локализацию, но со сравнительно низкой частотой обновления, в то время как IMU предоставляет моментальные обновления за счет менее точных данных. Для объединения преимуществ двух сенсоров обычно используют фильтр Калмана. Суть этого метода представлена на рисунок 2: IMU обновляет положение транспортного средства каждые 5 мс, но со временем накапливаются погрешности. Каждые 100 мс приходят обновления от GPS, которые помогают исправить погрешности IMU. Благодаря этому методу комбинация GPS/IMU может обеспечивать быструю и точную локализацию БА. Тем не менее мы не можем полагаться исключительно на эту комбинацию по трем причинам: сенсоры могут работать с необходимой точностью лишь в пределах одного метра; сигнал GPS имеет проблемы с многолучевым распространением, поэтому он может отражаться от зданий, создавая помехи; и GPS требует беспрепятственной передачи со спутников и, следовательно, не будет получать данные в туннелях или подобных местах. 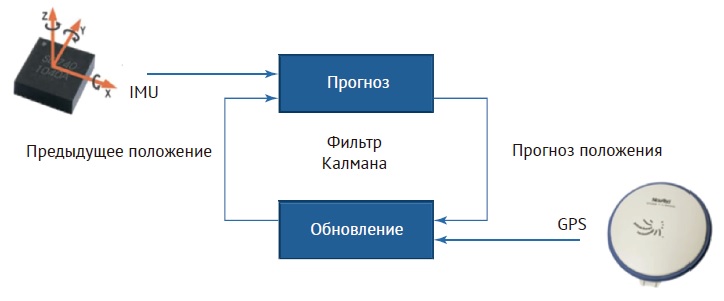 Рисунок 2 - Локализация при помощи GPS/IMU Также для локализации можно использовать данные камер. Локализация с помощью камер может быть реализована в виде упрощенной схемы: сначала путем триангуляции пар стереоизображений мы получаем карту диспаратности (disparity map), которую можно использовать для получения информации о глубине для каждой точки; сопоставив характерные при- знаки между последовательными кадрами стереоизображения, мы можем установить корреляции между ними в разных кадрах. Затем можем оценить перемещение БТС за время, прошедшее между двумя прошлыми кадрами; а также, сравнивая характерные особенности с теми, что есть на известной карте, мы можем получить данные о текущем положении транспортного средства. Все же такой подход к локализации очень чувствителен к условиям освещения и, следовательно, не является надежным. Именно поэтому лидар использует методы фильтра частиц. Облако точек, генерируемое лидаром, «описывает форму» окружающей среды, но отдельные точки датчик различает с трудом. Используя фильтр частиц, система сравнивает конкретную наблюдаемую форму облака точек с уже имеющейся картой. Для определения местонахождения движущегося транспортного средства относительно этих карт мы можем применить метод фильтра частиц, который позволяет сопоставить данные лидара с картой. Метод фильтрации частиц обеспечивает локализацию в реальном времени с точностью до 10 см и эффективен в городских условиях. Однако у лидара есть одна проблема: когда в воздухе много взвешенных частиц, таких как капли дождя и пыль, точность измерений снижается за счет возникающего шума. Следовательно, для достижения надежной и точной локализации нам необходимо использовать все датчики в совокупности, объединяя их преимущества. Распознавание и отслеживание объектов. Первоначально для обнаружения и отслеживания объектов использовался лидар, поскольку он способен предоставлять точную информацию о глубине. В последние годы мы стали свидетелями быстрого развития технологии глубокого обучения, которая позволяет относительно точно обнаруживать и отслеживать объекты. Сверточная нейронная сеть (CNN – Convolution Neural Network) – это тип глубокой нейронной сети (DNN – Deep Neural Network), которая широко используется для распознавания объектов. CNN обычно состоит из нескольких слоев. Сверточный слой, используя разные фильтры, извлекает различные признаки из образов входных данных. Каждый фильтр содержит набор «обучаемых» параметров. Слой активации принимает решение об активации целевого нейрона. Объединяющий слой уменьшает пространственный размер представления, чтобы уменьшить количество параметров и, следовательно, вычислений в сети. Полностью подключенный слой характерен тем, что нейроны устанавливают полные связи с активированными нейронами предыдущего слоя. Отслеживание объектов относится к автоматической оценке траектории объекта во время его движения. После того как отслеживаемый объект идентифицирован с использованием методов распознавания объектов, цель отслеживания объекта состоит в том, чтобы впоследствии автоматически отслеживать траекторию объекта. Такая технология может использоваться для отслеживания ближайших движущихся транспортных средств, а также людей, переходящих дорогу, чтобы предотвратить столкновение БА с ними. В последние годы методы глубокого обучения демонстрировали преимущества в отслеживании объектов в сравнении с традиционными методами. В частности, с помощью вспомогательных естественных изображений составной автокодировщик можно обучать в автономном режиме, что позволит изучить общие признаки изображения, которые более устойчивы к вариациям точек обзора и положениям транспортных средств. Затем автономную обученную модель можно применять для онлайн-трекинга. |