исследование следящих систем при детерминированных воздействиях
 Скачать 148.59 Kb. Скачать 148.59 Kb.
|

|
Министерство науки и высшего образования Российской Федерации Федеральное государственной бюджетное образовательное учреждения высшего образования ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР) Кафедра радиотехнических систем (РТС) «ИССЛЕДОВАНИЕ СЛЕДЯЩИХ СИСТЕМ ПРИ ДЕТЕРМИНИРОВАННЫХ ВОЗДЕЙСТВИЯХ» Отчет к лабораторной работе по дисциплине «Радиоавтоматика»
Томск 2021 Оглавлени 1Введение 3 2Результаты работы 4 3Заключение 16 Оглавление 2 1 Введение 3 2 Результаты работы 4 3 Заключение 16 ВведениеЦелью работы является ознакомление с возможностями системы Simulink для моделирования следящих систем и исследование их поведения в переходном и установившемся режимах при некоторых типовых воздействиях. Результаты работыСоздать модель следящей системы с фильтром в контуре управления, передаточная функция которого имеет вид:  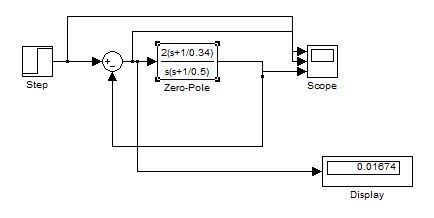 Рис. 2.1 – Модель следящей системы Подать на вход модели ступенчатый сигнал (Step) и исследовать зависимость длительности переходного процесса от параметров фильтра (  , ,  , ,  ) в контуре управления и представить эти зависимости в виде графиков. ) в контуре управления и представить эти зависимости в виде графиков.
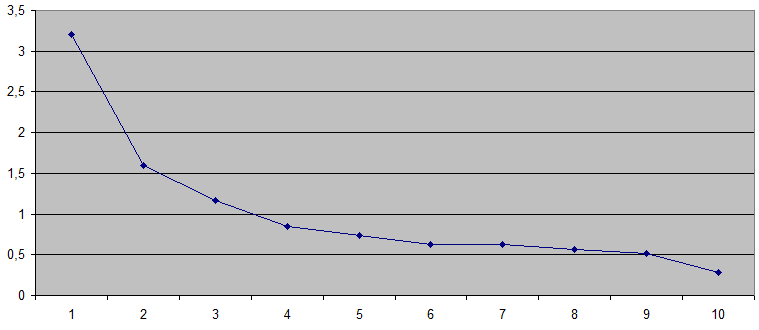 Рис. 2.2 – График зависимости 
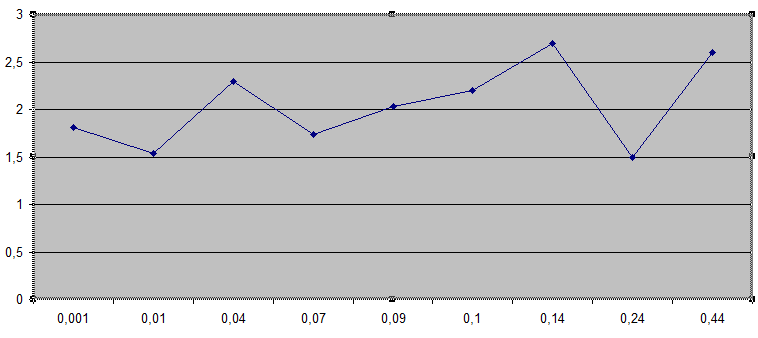 Рис. 2.3 – График зависимости 
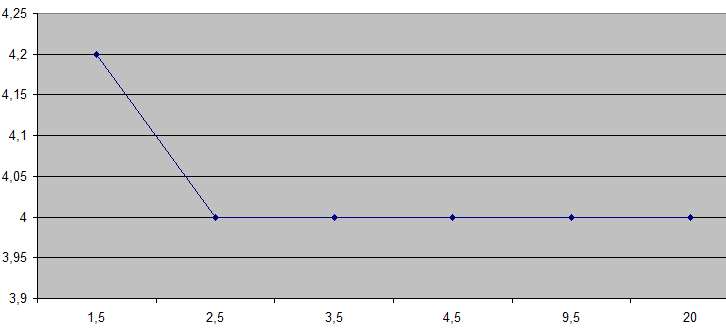 Рис. 2.4 – График зависимости  Исследовать зависимость величины перерегулирования от соотношения между параметрами фильтра в контуре управления. (Фиксируются два параметра и исследуется зависимость от третьего). Перерегулирование  высчитываем по формуле высчитываем по формуле где  – величина максимального отклонения управляемой величины; – величина максимального отклонения управляемой величины;  – установившееся значение в переходном режиме. – установившееся значение в переходном режиме.
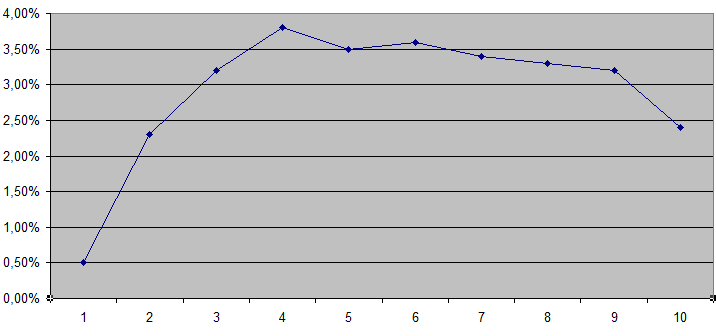 Рис. 2.5 – График зависимости 
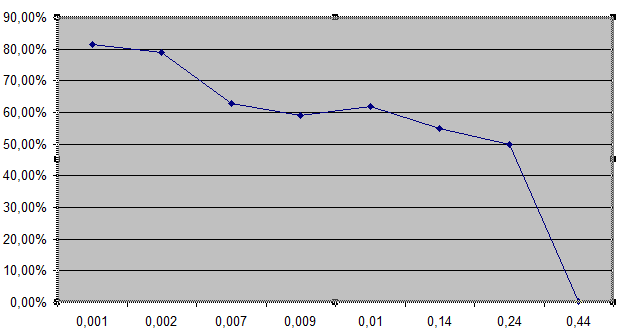 Рис. 2.6 – График зависимости 
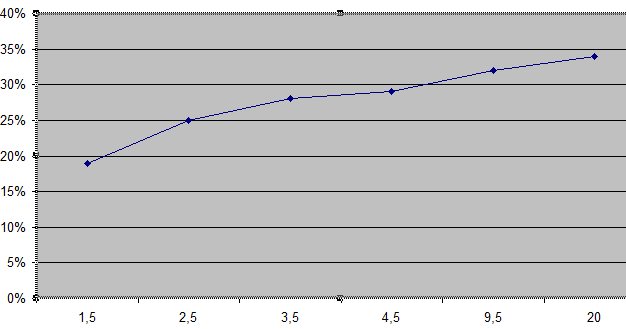 Рис. 2.7 – График зависимости  Снять зависимости установившегося значения ошибки слежения и длительности переходного процесса от коэффициента усиления фильтра в контуре управления.
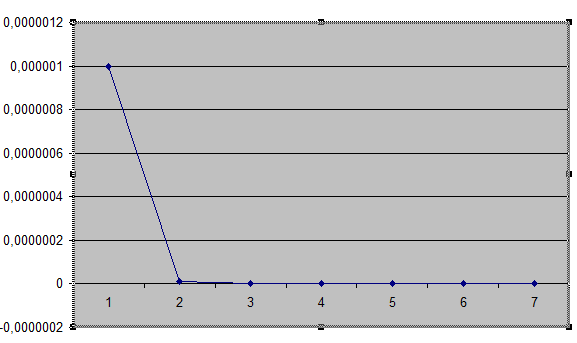 Рис. 2.8 – Зависимость установившегося значения ошибки от коэффициента усиления Определить реакцию системы на линейное воздействие (Ramp) и снять зависимости установившегося значения ошибки слежения и длительности переходного процесса от коэффициента усиления фильтра в контуре управления.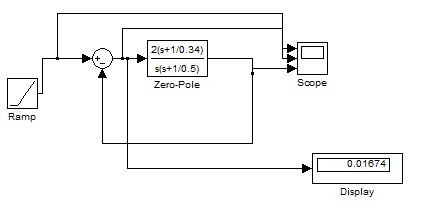 Рис. 2.9 – Модель следящей системы при линейном воздействии
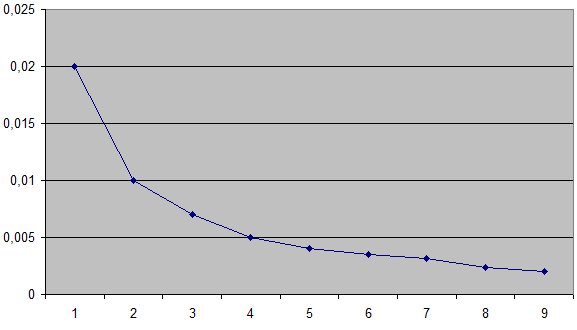 Рис. 2.10 – Зависимость установившегося значения ошибки от коэффициента усиления 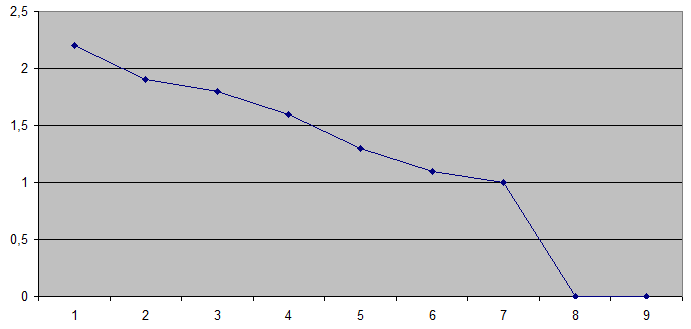 Рис. 2.11 – Зависимость установившегося значения ошибки от длительности ПП  Установить фильтр и исследовать поведение ошибки слежения при ступенчатом, линейном и квадратичном воздействиях. Квадратичное воздействие сформировать путем последовательного соединения блоков Ramp и интегратора. Ошибки: Квадратичное воздействие: 0,17 Линейное воздействие:  Ступенчатое воздействие:  ЗаключениеВ ходе лабораторной работы определили реакцию системы на линейное воздействие (Ramp) и ступенчатый сигнал (Step). Исследовали зависимость длительности переходного процесса от параметров фильтра, установили зависимость величины перерегулирования от соотношения между параметрами фильтра в контуре управления, сняли зависимость установившегося значения ошибки слежения и длительности переходного процесса от коэффициента усиления фильтра в контуре управления. Минимальная ошибка при линейном воздействии. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||