Классификация САУ. Реферат_Классификация САУ. Классификация сау по принципу действия
 Скачать 34.87 Kb. Скачать 34.87 Kb.
|

|
Управление объектом с помощью технических средств без участия человека называется автоматическим управлением. Теория автоматического управления (ТАУ) это наука, которая изучает процессы управления и проектирования систем автоматического управления, работающих по замкнутому циклу с обратной связью. Совокупность объекта управления и средств автоматического управления называется системой автоматического управления (САУ). Основной задачей автоматического управления является поддержание определенного закона изменения одной или нескольких физических величин в объекте управления. Классификация САУ бывает: по принципу действия; по характеру изменения выходной переменной; по математическому описанию. Классификация САУ по принципу действия САУ подразделяются на разомкнутые; замкнутые; комбинированные. В разомкнутых САУ управляющее воздействие задаётся на основании цели управления, характеристик объекта и известных внешних воздействий, но без учёта истинного значения управляемой переменной. Если на рисунке 1 разорвать ОС, то получится разомкнутая САУ. Она будет разомкнутой как при наличии, так и при отсутствии штриховой линии. Поскольку в этих САУ осуществляется компенсация известных внешних возмущений, то этот принцип управления называется управлением по возмущению. В замкнутых САУ управляющее воздействие формируется в непосредственной зависимости от управляемой переменной. Этот принцип управления называется управлением по отклонению (  ). Если на рисунке 1 разорвать штриховую линию, то получится система с управлением по отклонению. ). Если на рисунке 1 разорвать штриховую линию, то получится система с управлением по отклонению.Если одновременно используются оба принципа управления (по возмущению и отклонению), то такая система называется системой комбинированного принципа действия (комбинированной системой). Комбинированной является вся система на рисунке 1.  Рисунок 1 – Функциональная схема системы управления угловой скоростью ротора электродвигателя Классификация САУ по характеру изменения выходной переменной САУ подразделяются на: системы стабилизации; системы программного регулирования; следящие системы. Системой стабилизации называют такую САУ, которая поддерживает постоянное значение управляемой переменной (  ). ).Системой программного регулирования называется такая САУ, которая изменяет выходную переменную по заранее заданному закону  . .Следящими называются такие САУ, которые воспроизводят изменение управляемой переменной в соответствии с изменением задающего воздействия с неизвестным законом изменения. Классификация САУ по математическому описанию САУ состоит из ряда звеньев. У каждого звена может быть одно или несколько входных воздействий (входные переменные) и одна или несколько выходных переменных. Каждое звено описывается алгебраическими и (или) дифференциальными, и (или) разностными уравнениями. Если подать на звено входной сигнал, то в выходном сигнале возникает переходный процесс. Если звено устойчивое, то при постоянном входном сигнале через некоторое время устанавливается постоянный выходной сигнал. Зависимость выходного сигнала от входного в установившемся режиме называется статической характеристикой данного звена. Основными признаками классификации являются: непрерывность или дискретность динамических процессов во времени; линейность или нелинейность уравнений, описывающих динамику процессов в звеньях. Системой непрерывного действия называется такая САУ, в каждом звене которой при непрерывном входном воздействии выходная переменная также является непрерывной. Ниже приведены статические характеристики непрерывных звеньев. 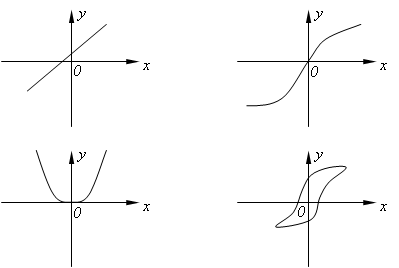 Рисунок 2 – Примеры статических характеристик непрерывных звеньев, где х, у – входной и выходной сигналы Цифровой называется такая САУ, в которой имеется хотя бы одно звено, у которого при непрерывном входном сигнале выходной сигнал имеет вид последовательности импульсов. Такое звено называется импульсным (рисунок 3). Линейной называется САУ, в которой в каждом звене выходные сигналы линейно связаны с входными сигналами. 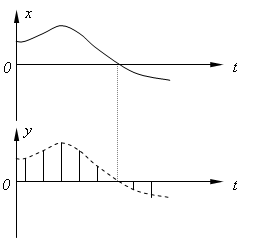 Рисунок 3 – Импульсное звено, где х, у – входной и выходной сигналы Нелинейной называется САУ, в которой имеется хотя бы одно звено с нелинейной зависимостью между входным и выходным сигналами. Особым подклассом нелинейных систем являются релейные системы. Релейной называется такая САУ, в которой хотя бы в одном звене при непрерывном изменении входной переменной выходная переменная в некоторых точках процесса, зависящих от значения входной переменной, изменяется скачком. 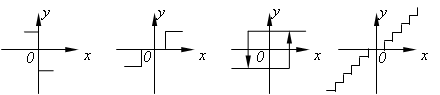 Рисунок 4 – Примеры статических характеристик релейных звеньев |