кускаев. Контрольная работа по дисциплине Основы электропривода технологических установок
 Скачать 0.7 Mb. Скачать 0.7 Mb.
|

 Федеральное агентство железнодорожного транспорта Государственное образовательное учреждение высшего образования «Уральский государственный университет путей сообщения» (ФГБОУ ВО УрГУПС) Кафедра «Электрическая тяга» Контрольная работа по дисциплине «Основы электропривода технологических установок» Вариант №13
Екатеринбург 2022 Задание на 1 часть КР "Принцип действия машин постоянного тока". На рисунке 1, покажем направление ЭДС, угловую скорость, направление момента, направление полюсов, направление магнитного потока, направление напряжение 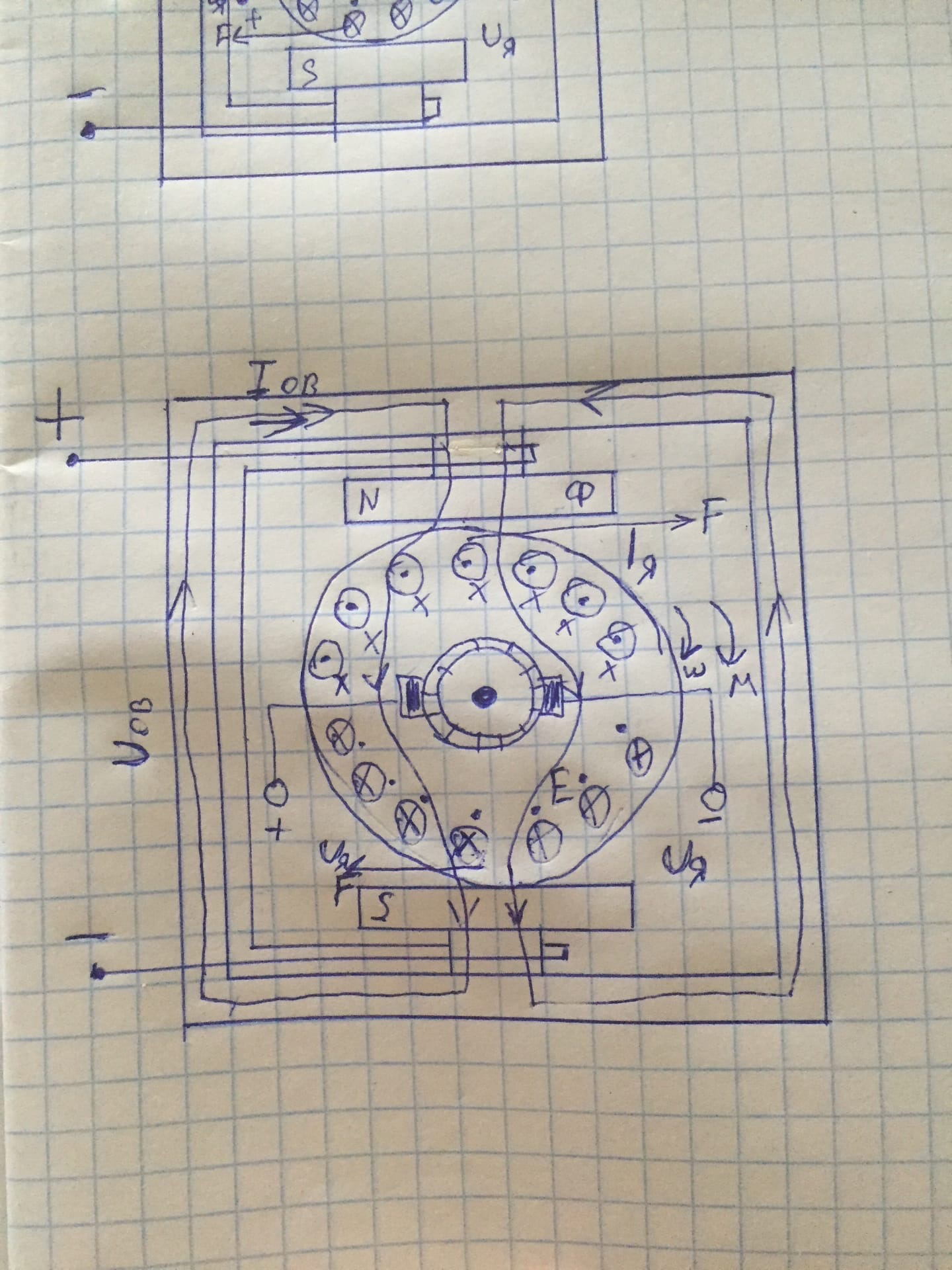 Рисунок 1 – Принцип действия машин постоянного тока Задание на 2 часть КР «Расчет и построение механических характеристик двигателя постоянного тока с независимой обмоткой возбуждения». Таблица 1 – паспортные данные:
H – порядковый номер студента по списочному составу группы. Схема двигателя независимого возбуждения изображена на рисунке 1 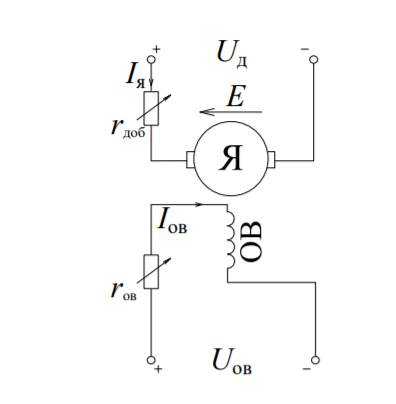 Рисунок 1 – Схема двигателя постоянного тока независимого возбуждения Найдем скорость вращение Определим номинальную частоту вращения Рассчитаем момент на валу в номинальном режиме работы Величина Определим скорость идеального холостого хода Определим номинальное сопротивление в цепи якоря двигателя, выразив его из скоростной электромеханической характеристики двигателя Найдем и построим регулировочные характеристики: А) Найдем регулировочную характеристику если сопротивление Б) Найдем регулировочную характеристику если напряжение   В) Найдем регулировочную характеристику если величину магнитного поля 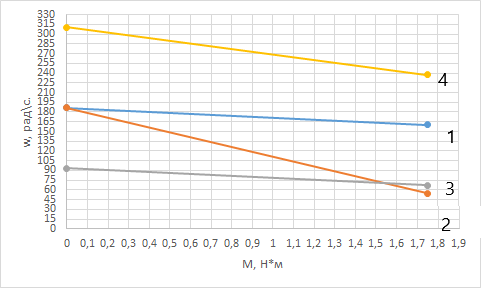 Рисунок 2 – Механические характеристики двигателя постоянного тока независимого возбуждения Задание на 3 часть КР «Расчет и построение механических характеристик двигателя постоянного тока с последовательной обмоткой возбуждения». Таблица 2 – паспортные данные:
H – порядковый номер студента по списочному составу группы. Найдем сопротивление двигателя Скоростная электромеханическая характеристика ДПТ ПВ представляет зависимость ω = f(Iя) и описывается уравнением Переведем об/мин в рад/с Моментная электромеханическая характеристика – это зависимость M = f(Iя), описанная уравнением Зная все паспортные данные мы найдем магнитный поток В таблице 3 сведены данные естественной электромеханической и механической характеристики ДПТ ПВ. Таблица 3 – Скоростные характеристики
 Рисунок 3 – Зависимость w от  Рисунок 4 – Кривая намагничивания  Рисунок 5 – Моментная характеристика ДПТ ПВ Рассчитаем и построим регулировочную механическую характеристику по регулированию сопротивлением (Мн:0,3 Определим добавочное сопротивление по формулам Подставляем известные значения Получаем По формуле посчитаем угловую частоту В таблицу 4 сведены результаты расчета регулировочной механической характеристики по регулированию сопротивлением. Таблица 4 – Регулировочная механическая характеристики характеристика по регулированию сопротивлению ДПТ ПВ
По рассчитанным значениям строим регулировочную механическую характеристику по регулированию сопротивлением (рисунок 7). Расчет и построение регулировочной механической характеристики по регулированию напряжением. (1,3Мн:0,5 Определим напряжение по формулам Получаем Тогда По формуле посчитаем угловую частоту В таблицу 5 сведены результаты расчета регулировочной механической характеристики по регулированию напряжением. Таблица 5 – Регулировочная механическая характеристики характеристика по регулированию напряжения ДПТ ПВ
По рассчитанным значениям строим регулировочную механическую характеристику по регулированию напряжением (рисунок 7). Расчет и построение регулировочной механической характеристики по регулированию магнитным потоком. Определим момент и угловую частоту по формулам при (0,6𝐶𝑛Ф)  В таблицу 6 сведены результаты расчета регулировочной механической характеристики по регулированию магнитным потоком
Таблица 6 – Регулировочная механическая характеристики характеристика по регулированию магнитным потоком ДПТ ПВ По рассчитанным значениям строим регулировочную механическую характеристику по регулированию магнитным потоком (рисунок 7).  Рисунок 7 – Механическая характеристика (w = 𝑓(𝑀)) Задание на 4 часть КР «Расчет и построение пусковых характеристик двигателя постоянного тока с независимой обмоткой возбуждения». Таблица 7 – паспортные данные:
H – порядковый номер студента по списочному составу группы. Найдем угловую скорость вращения двигателя при номинальном режиме работе, переведем об/мин в рад/с по формуле Найдем момент по формуле при номинальном режиме работы Из формулы выразим коэффициент 𝐶𝑛Ф Определим номинальное сопротивление в цепи якоря двигателя, выразив его из скоростной электромеханической характеристики двигателя Определим скорость идеального холостого хода Ток, возникающий в момент пуска двигателя, определяется только подаваемым на двигатель напряжением и сопротивлением обмоток якоря Пусковой момент двигателя постоянного тока Посчитаем реостатный способ пуска Таблица 8 –Значения
Посчитаем с пониженным напряжением  Рисунок 8 – Механические характеристики при различных способах пуска ДПТ НВ Задание на 5 часть КР «Расчет и построение механических характеристик асинхронного двигателя». Таблица 9 – паспортные данные:
H – порядковый номер студента по списочному составу группы. Найдем выходную мощность используя формулу Найдем номинальную силу тока Найдем номинальный момент  Найдем критическое значение момента Число пар полюсов определим по формуле При известных паспортных данных АД величина критического скольжения может быть найдена из выражения Используя формулы, паспортные (номинальные) данные двигателя, приведенные в таблице, необходимо рассчитать координаты точек механических (ω2 = f(М); M = f(s)) характеристик АД. Результаты расчета занесем в таблицу 10.  Таблица 10 – Результаты расчета механической характеристики АД
По полученной таблице строим две зависимости 𝑀 = 𝑓(𝑠) и w2 = 𝑓(𝑀).  Рисунок 9 – ЗависимостьM=f(s)  Рисунок 10 – Зависимость | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||