лаба механика 2. Лабораторная работа 1 Дисциплина МРиММ Тема Прямая задача кинематики о положениях студент группы Б213111 сссссссссс Проверил
 Скачать 60.41 Kb. Скачать 60.41 Kb.
|

|
МИНОБРНАУКИ РОССИИ Федеральное государственное бюджетное образовательное учреждение Высшего профессионального образования «Ижевский государственный технический университет имени М.Т.Калашникова» Институт «ИСТМАиМ» Кафедра «Мехатронные системы» Лабораторная работа №1 Дисциплина «МРиММ» Тема «Прямая задача кинематики о положениях» Выполнил: студент группы Б21-311-1 сссссссссс Проверил: старший преподаватель сссссссссссс сссссссссс Цель работы: провести расчёт положения схвата для заданной кинематической схемы манипулятора тензорно-матричным методом. Ход работы Рассмотрим пример расчета положения схвата для кинематической схемы манипулятора, представленной на рисунок 1, тензорно-матричным методом, с учетом представленных в таблице 1 исходных данных для расчета. 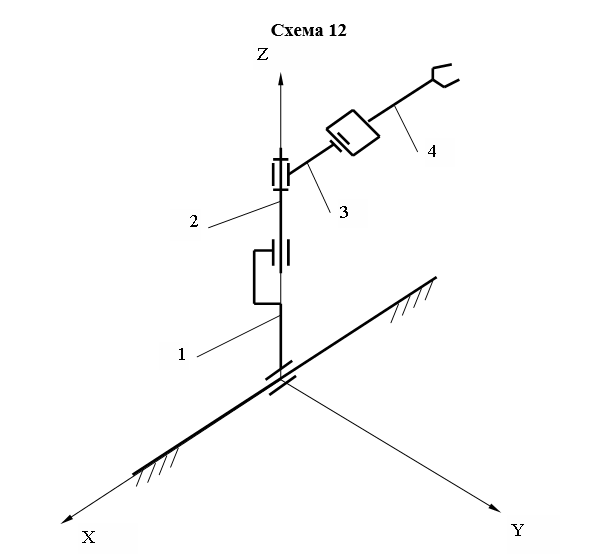   Рисунок 1 - Кинематическая схема трехзвенного манипулятора Рисунок 1 - Кинематическая схема трехзвенного манипулятораТаблица 1 – Расчётные данные
Выражение для радиус-вектора точки выходного звена в соответствии с правилами построения принимает следующий вид:  Для всех кинематических пар, ориентация звеньев остается постоянной, с тем отличием, что происходит корректирование угла поворота в случае вращательного движения (  и и  ) и дополнительный перенос в случае поступательного движения ) и дополнительный перенос в случае поступательного движения  и и  . .Проведем расчеты:  ; ;Третье звено определяется матрицей поворота  вокруг оси Z: вокруг оси Z: ; ;Четвертое звено определяется матрицей поворота  вокруг оси Z: вокруг оси Z: ; ;Звено 1 вращается вокруг оси Z:  Звено 2 также вращается вокруг оси Z:  Звено 3 вращается вокруг оси Х:  Звено 4 вращается вокруг оси Х:  Также найдем радиус-вектор поступательного движения  : : Подставляя значения матриц в исходное уравнение, определим значение радиус-вектора схвата:  Вывод В ходе лабораторной работы провели расчёт положения схвата для заданной кинематической схемы манипулятора тензорно-матричным методом, научились решать прямые задачи кинематики о положения. Вычислили положение точки пространства по своему варианту. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||





