Расчет траектории неуправляемых реактивных ЛА малой дальности. ЛР №1. Лабораторная работа 1 Расчет траектории неуправляемых реактивных ла малой дальности
 Скачать 251.44 Kb. Скачать 251.44 Kb.
|

|
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ БАЛТИЙСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ «ВОЕНМЕХ» им. Д.Ф. УСТИНОВА  Дисциплина
ЛАБОРАТОРНАЯ РАБОТА № 1
Санкт-Петербург 2021 г. Лабораторная работа №1 «Расчет траектории неуправляемых реактивных ЛА малой дальности.» Цель работы- провести расчет траектории движения неуправляемого реактивного ЛА малой дальности. Содержание работы: Таблица результатов моделирования, содержащая зависимость полученной дальности полета от шага интегрирования для методов Эйлера и Рунге-Кутта. Шаг интегрирования принят  сек. Выбран оптимальный метод и шаг интегрирования. сек. Выбран оптимальный метод и шаг интегрирования.Таблица результатов моделирования, содержащая зависимость параметров ЛА  от времени (для первых и последних 10 шагов), при выбранном методе и шаге интегрирования от времени (для первых и последних 10 шагов), при выбранном методе и шаге интегрирования  . .Графики  для двух методов интегрирования (при оптимальном шаге интегрирования ). для двух методов интегрирования (при оптимальном шаге интегрирования ).Выводы по результатам моделирования. Исходные данные:
Угол подъема направляющих  . Эффективная скорость истечения . Эффективная скорость истечения  Выполнение работы. Рассчитать время схода с направляющих  и скорость схода с направляющих и скорость схода с направляющих  . .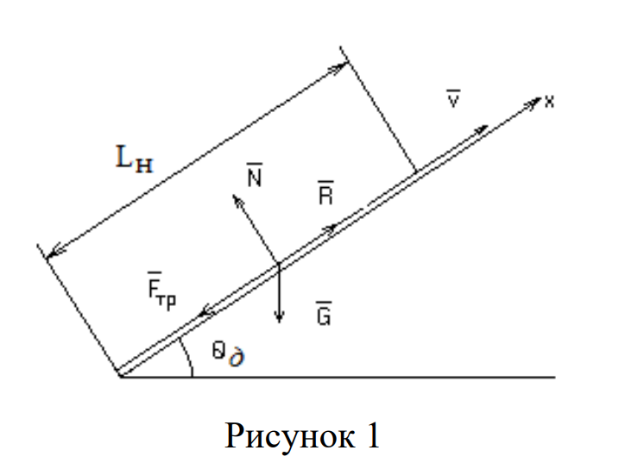 Схема сил, действующих на ЛА при движении по направляющим представлена на рисунке 1. Схема сил, действующих на ЛА при движении по направляющим представлена на рисунке 1.Уравнение движения ЛА по направляющим в проекции на направление скорости запишется в виде:   Индекс «∂» - дульное,  – коэффициент трения скольжения. – коэффициент трения скольжения.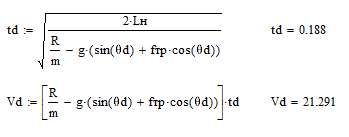 Если пренебречь изменением массы при движении ЛА по направляющим, тогда следует: Если пренебречь изменением массы при движении ЛА по направляющим, тогда следует:Выбор метода и шага интегрирования численного интегрирования для систем уравнений расчета траектории ЛА на активном и пассивном участках полета. В работе для расчета траектории ЛА на активном и пассивном участках используются 2 метода решения систем дифференциальных уравнений: Эейлера и Рунге-Кутта 4-го порядка. Шаг численного интегрирования (оптимальный): 0.01. Отобразим сводные таблицы, содержащие результаты моделирования зависимости полученной дальности полета от шага интегрирования. (Таблица №1 и таблица №2). Таблица №1. Зависимость дальности полета от шага интегрирования. Расчет методом Эйлера.
Таблица №2. Зависимость дальности полета от шага интегрирования. Расчет методом Рунге-Кутта 4-го порядка.
Рассчитаем активный и пассивный участки траектории для заданных начальных условий (конечных данных на предыдущем участке). Отобразим сводные таблицы (таблицы №3 и №4) результатов моделирования, содержащие зависимости параметров ЛА от времени (первые 10 шагов и последние 10 шагов) для методов Эйлера и Рунге-Кутта 4-го порядка. При расчете использован «оптимальный» шаг интегрирования, равный 0.01.Таблица №3. Зависимость параметров ЛА от времени (первые 10 шагов) для метода Эйлера.
Таблица №4. Зависимость параметров ЛА от времени (последние 10 шагов) для метода Эйлера.
Таблица №5. Зависимость параметров ЛА от времени (первые 10 шагов) для метода Рунге-Кутта 4-го порядка.
Таблица №6. Зависимость параметров ЛА от времени (последние 10 шагов) для метода Рунге-Кутта 4-го порядка.
  Рисунок 2. Зависимость  Рисунок 1. Зависимость V(t) При помощи программного пакета MATLAB отобразим графики для двух методов интегрирования (при оптимальном шаге интегрирования, равном 0.01).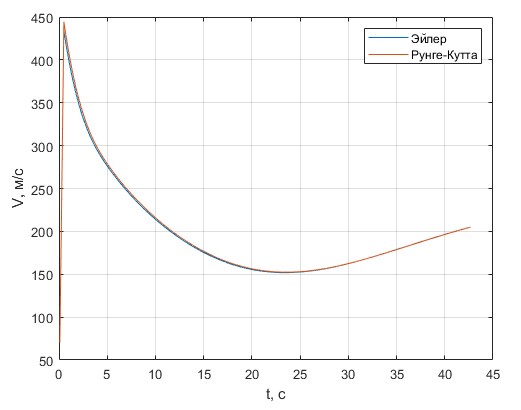 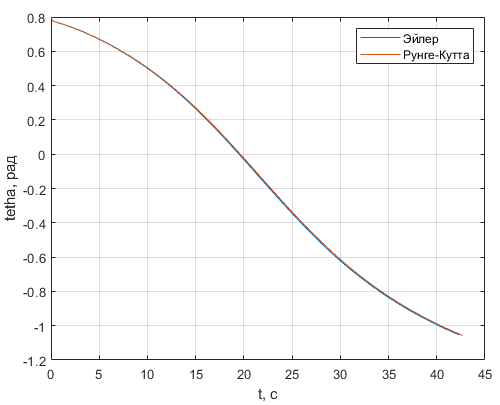 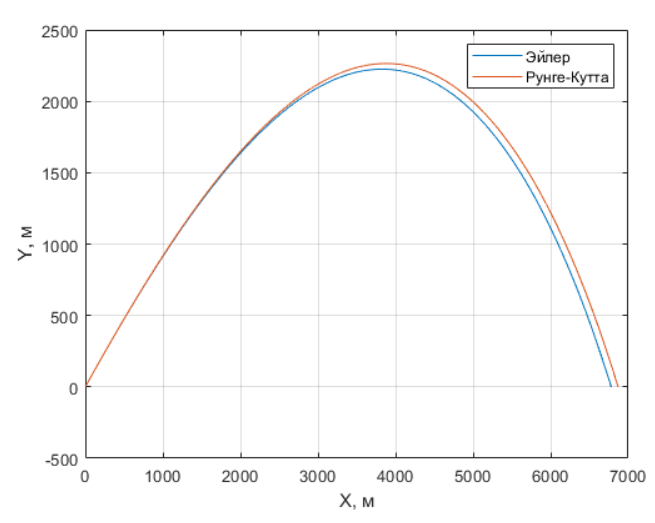  Рисунок 3. Зависимость y(x) Вывод. В ходе выполнения данной лабораторной работы мы провели расчет траектории движения неуправляемого реактивного ЛА малой дальности. Расчет состоял из трех этапов: расчет движения по направляющим, расчет траектории ЛА на активном участке и расчет траектории ЛА на пассивном участке. Расчет траектории заключался в решении задачи Коши – интегрировании систем дифференциальных уравнений (уравнений с начальными данными). Для расчета были использованы 2 метода: Метод Эйлера и метод Рунге-Кутта 4-го порядка. В ходе вычислений, путем сравнения 4-х вариантов выбора шагов интегрирования удалось установить, что «оптимальный» шаг интегрирования имеет значение, равное 0.01. При данном значении шага значения параметров траектории, вычисленные при помощи двух методов интегрирования (Эйлера и Рунге-Кутта 4-го порядка), близки по значению, достигается необходимый уровень точности вычислений. |








