Лекция 2_Принципы построения мехатронных систем. Лекция 2. Принципы построения мехатронных систем
 Скачать 409.8 Kb. Скачать 409.8 Kb.
|

|
Лекция №2. Принципы построения мехатронных систем Рассмотрим обобщенную структуру машин с компьютерным управлением, ориентированных на задачи автоматизированного машиностроения, которая представлена на рисунок 1. В основу построения данной схемы положена широко известная структура автоматических роботов, введенная академиком Е.П.Поповым [1]. 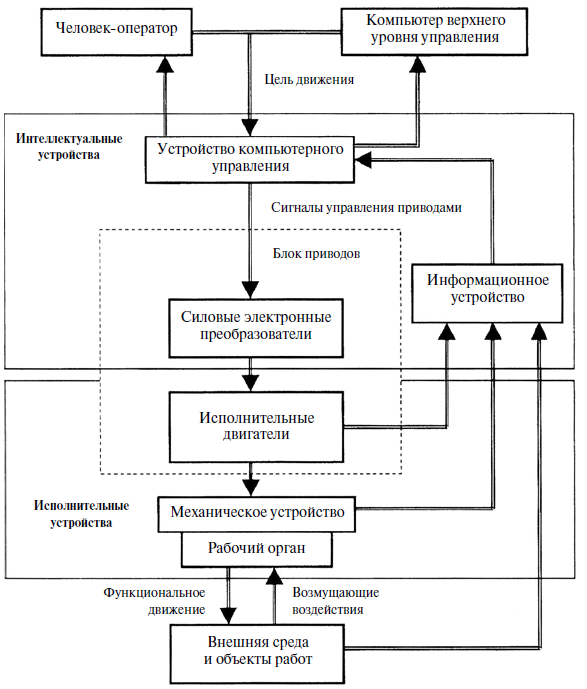 Рисунок 1 - Обобщенная структура мехатронных машин Внешней средой для машин рассматриваемого класса является технологическая среда, которая содержит различное основное и вспомогательное оборудование, технологическую оснастку и объекты работ. При выполнении мехатронной системой заданного функционального движения объекты работ оказывают возмущающие воздействия на рабочий орган. Примерами таких воздействий могут служить силы резания для операций механообработки, контактные силы и моменты сил при сборке, сила реакции струи жидкости при операции гидравлической резки. Внешние среды укрупнено можно разделить на два основных класса: детерминированные и недетерминированные. К детерминированным относятся среды, для которых параметры возмущающих воздействий и характеристики объектов работ могут быть заранее определены с необходимой для проектирования МС степенью точности. Некоторые среды являются недерминированными по своей природе (например, экстремальные среды: подводные, подземные и т.п.). Характеристики технологических сред как правило могут быть определены с помощью аналитико-экспериментальных исследований и методов компьютерного моделирования. Например, для оценки сил резания при механообработке проводят серии экспериментов на специальных исследовательских установках, параметры вибрационных воздействий измеряют на вибростендах с последующим формированием математических и компьютерных моделей возмущающих воздействий на основе экспериментальных данных. Однако для организации и проведения подобных исследований зачастую требуются слишком сложные и дорогостоящие аппаратура и измерительные технологии. Так для предварительной оценки силовых воздействий на рабочий орган при операции роботизированного удаления облоя с литых изделий необходимо измерять фактические форму и размеры каждой заготовки. В таких случаях целесообразно применять методы адаптивного управления, которые позволяют автоматически корректировать закон движения МС непосредственно в ходе выполнения операции. В состав традиционной машины входят четыре основные части: механическое устройство, конечным звеном которого является рабочий орган; блок приводов, включающий силовые преобразователи и исполнительные двигатели; устройство компьютерного управления, верхним уровнем для которого является человек-оператор, либо другая ЭВМ, входящая в компьютерную сеть; информационное устройство (сенсоры), предназначенные для получение и передачи в устройство компьютерного управления информации о реальном движении машины и о фактическом состоянии ее подсистем. Механическое устройство и двигатели объединены в группу исполнительных устройств. В состав группы интеллектуальных устройств включены электронная, управляющая и информационная части машины. Электромеханическая часть включает механические звенья и передачи, рабочий орган, электродвигатели, сенсоры и дополнительные электротехнические элементы (тормоза, муфты). Механическое устройство предназначено для преобразования движений звеньев в требуемое движение рабочего органа. Электронная часть состоит из микроэлектронных устройств, силовых преобразователей и электроники измерительных цепей. Информационное устройство (сенсоры) предназначено для сбора данных о фактическом состоянии внешней среды и объектов работ, механического устройства и блока приводов с последующей первичной обработкой и передачей этой информации в устройство компьютерного управления (УКУ). Таким образом, наличие трех обязательных частей - механической (точнее электромеханической), электронной и компьютерной, связанных энергетическими и информационными потоками, является первичным признаком, отличающим мехатронные системы. Устройством компьютерного управления будем называть комплекс аппаратных и программных средств, вырабатывающий сигнлаы управления для блока пиводов машины. В состав комплекса обычно входят компьютер верхнего уровня и контроллеры управления движением. Устройство компьютерного управления выполняет следующие основные функции: I. Управление процессом механического движения мехатронного модуля или многомерной системы в реальном времени с обработкой сенсорной информации. II. Организация управления функциональными движениями МС, которая предполагает координацию управления механическим движением МС и сопутствующими внешними процессами. Как правило, для реализации функции управления внешними процессами используются дискретные входы/выходы устройства. III. Взаимодействие с человеком-оператором через человеко-машинный интерфейс в режимах автономного программирования (off-line) и непосредственно в процессе движения МС ( режим on-line). IV. Организация обмена данными с периферийными устройствами, сенсорами и другими устройствами системы. Информационное устройство предназначено для сбора и переда чи в устройство управления информации о фактическом состоянии внешней среды и движущейся мехатронной машины. Согласно представленной блок-схеме в информационном устрой стве можно выделить три группы сенсоров:
Механическое устройство мехатронной машины представляет со бой многозвенный механизм, кинематическую цепь которого образу ют движущиеся звенья, составляющие кинематические пары. Конеч ным звеном кинематической цепи является рабочий орган. Рабочий орган мехатронной машины - это составная часть меха нического устройства для непосредственного выполнения техноло гических операций и / или вспомогательных переходов. Примеры рабочих органов в робототехнике: механические схва ты, вакуумные и электромагнитные захватные устройства, сварочные клещи (для точечной сварки), инструментальные головки для механо обработки и лазерных операций, окрасочный пистолет. Таким обра зом, рабочий орган - это управляемый модуль, который может иметь несколько степеней подвижности и состоять из нескольких элемен тов, поэтому при его разработке также могут использоваться мехатронные принципы интеграции. 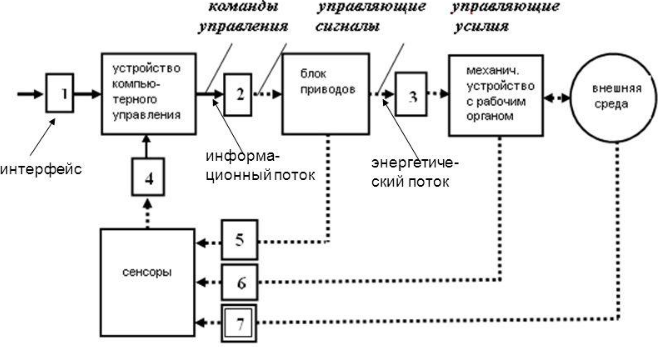 Блок-схема традиционной машины с компьютерным управлением Для сопряжения элементов в систему традиционно вводят специальные интерфейсные устройства. Приведем примеры межблоковых интерфейсов, которые встречаются в машинах с компьютерным управлением, в частности, в станках с ЧПУ, промышленных роботах. И1 – комплекс сетевых аппаратно-программных средств для сопряжения УКУ с компьютерной сетью, либо это интерфейс человек-машина, если цель управления МС задается непосредственно человеком. И2 – интерфейс для формирования управляющих электрических напряжений для исполнительных приводов. Интерфейс, обычно, включает в себя ЦАП и усилительно-преобразующие устройства. И3 – интерфейс, включающий, как правило, механрические передачи, связывающие исполнительные двигатели со звеньями механрического устройства. Конструктивно – это редукторы, муфты, гибкие связи, тормоза и т.д. И4 – интерфейс, используемый на входе УКУ в случае применения в МС сенсоров с аналоговыми выходными сигналами. В состав таких интерфейсов, как правило, включаются АЦП. И5, И6, И7 – интерфейсы, устройство которых зависит от физического характера входных переменных состояния системы. Они могут быть электрическими или механическими. К механическим интерфейсам относятся присоединительные устройства для датчиков обратной связи приводов. К электрическим интерфейсам относятся преобразователи сигналов о переменных состояния системы в электрические сигналы. Связи всех элементов с УКУ предусматривает не только аппаратное сопряжение, но также соответствующее программное обеспечение (операционную систему, драйверы) для организации обмена данными в режиме реального времени. При традиционном проектировании интерфейсы представляют собой отдельные самостоятельные устройства и узлы. Обычно это сепаратные (отдельные) блоки, выпускаемые специализированными фирмами, или изготавливаемые разработчиками. Принципиальное различие мехатронного и традиционного подходов к проектированию и изготовлению модулей и машин состоит в концепции технической реализации функциональных преобразователей. Задачей мехатронной системы является преобразование входной информации, поступающей с верхнего уровня управления, в целенаправленное механическое движение с управлением на основе принципа обратной связи. 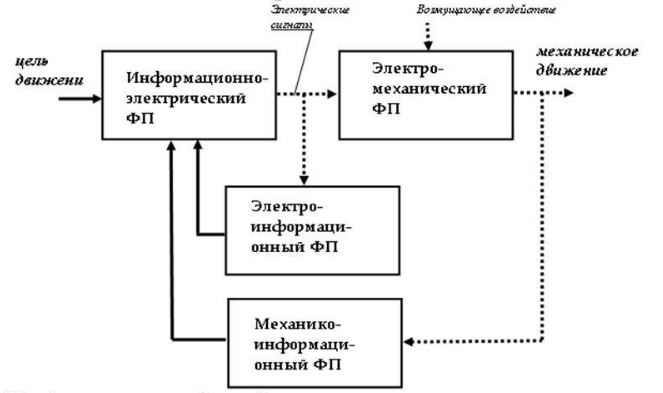 ФП – функциональный преобразователь Блок-схема автоматической машины с компьютерным управлением, построенная на основе мехатронного подхода Сравнивая блок-схемы МС на основе традиционных и мехатронных подходов можно сделать вывод, что количество преобразующих, в том числе и интерфейсных блоков в традиционной машине с компьютерным управлением избыточно по отношению к минимально-необходимому числу информационно-энергетических функциональных преобразователей. Суть мехатронного подхода к проектированию [2] состоит в интеграции в единый функциональный модуль двух или более элементов возможно даже различной физической природы. Другими словами, на стадии проектирования из традиционной структуры машины исключается как сепаратное (отдельное) устройство, по крайней мере, один интерфейс при сохранении физической сущности преобразования, выполняемого данным модулем. Сущность мехатронного подхода состоит в том, что он направлен на интеграцию конкретного класса элементов (механических, электронных, компьютерных и т.д.), которые имеют принципиально различную физическую природу и предназначены для реализации сложного функционального движения. В идеальном для пользователя варианте мехатронный модуль, получив на вход информацию о цели управления, будет выполнять с желаемыми показателями качества заданное функциональное движение. Аппаратное объединение элементов в единые конструктивные модули должно обязательно сопровождаться разработкой интегрированного программного обеспечения. Программные средства МС должны обеспечивать непосредственный переход от замысла системы через ее математическое моделирование к управлению функциональным движением в реальном времени. Для реализации сформулированного мехатронного подхода следует определить локальные точки интеграции элементов в единый функциональный модуль. Потенциально возможные точки аппаратной интеграции и структуры соответствующих ММ представлены в таблице 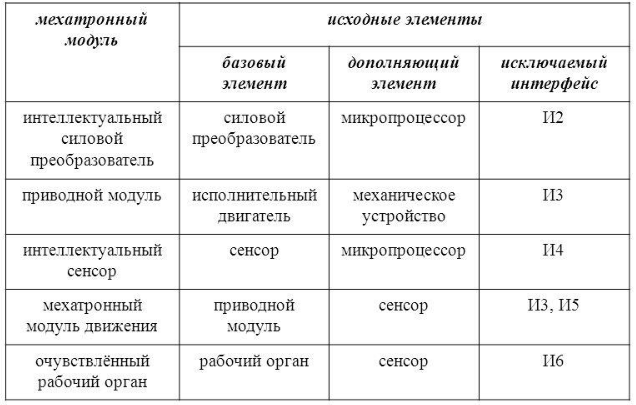 Применение мехатронного подхода при создании машин с компьютерным управлением определяет их основные преимущества по сравнению с традиционными средствами автоматизации:
Область применения мехатроники. Объемы мирового производства мехатронных устройств ежегодно увеличиваются, охватывая все новые сферы. Сегодня мехатронные модули и системы находят широкое применение в следующих областях:
Этот список может быть расширен. Рынок мехатронной техники динамически развивается и имеет устойчивую тенденцию к росту. Современные тенденции развития мехатронных систем. Общепризнанными тенденциями современного развития техники являются: миниатюризация, интеллектуализация, интеграция. 1Интеграция В качестве основного классификационного признака в мехатронике представляется целесообразным принять уровень интеграции составляющих элементов. Синергетическая интеграция элементов при проектировании мехатронных изделий основана на трех базовых принципах:
Степень интеграции мехатронной системы является одним из основных классификационных признаков в мехатронике. В соответствии с этим признаком можно разделять мехатронные системы по уровням или по поколениям, если рассматривать их появление на рынке наукоемкой продукции исторически. В соответствии с признаком синергетического объединения, исторически мехатронные модули можно разделить на несколько уровней. Мехатронные модули первого уровня представляют собой объединение только двух исходных элементов (чаще всего механического и электрического или гидравлического, пневматического). Типичными примерами модулей первого поколения могут служить «мотор-редукторы», «мотор-колесо», где механический редуктор и колесо вместе с управляемым двигателем выпускаются как единый функциональный элемент.
Мехатронные модули второго уровня появились в 80-е годы в связи с развитием новых электронных технологий, которые позволили создать миниатюрные датчики и электронные блоки для обработки их сигналов. В этих модулях была достигнута интеграция трех устройств различной физической природы: механических, электротехнических и электронных. На базе мехатронных модулей данного класса созданы управляемые энергетические машины (турбины, генераторы), станки и промышленные роботы с числовым программным управлением. Мехатронные модули третьего уровня возникли в связи с появлением на рынке сравнительно недорогих микропроцессоров и контроллеров на их основе. По сравнению с модулями второго уровня они дополнительно имеют аппаратно и программно-встроенную компьютерную часть, что позволяет называть их интеллектуальными мехатронными модулями движения. В результате достигается интеграция четырех и более компонентов: высокоточных и компактных механических узлов, прецизионных информационно-измерительных устройств, вычислительных средств и современных технологий управления. На четвертом уровне интеграции из мехатронных модулей компонируются многокоординатные интеллектуальные мехатронные машины, роботы и робототехнические системы.
Пятый уровень интеграции предполагает создание самодостаточной системы интеллектуальных многофункциональных мехатронных машин для реконфигурируемого производства, построенного по принципу клеточного строения живых организмов из многофункциональных ячеек. Это, по существу, означает переход от основанного на декомпозиции модульного построения технических систем к системно оптимизированным единым структурам. Процесс создания однородных структур уже начался с взаимного проникновения, а затем и слияния информационных компонентов в единую структуру, реализующую функциональные компоненты подобно мультиагентным системам в компьютерных сетях. Эта тенденция должна распространиться далее и на силовые компоненты, например, за счет использования в мехатронных технологиях «активных» материалов, которые способны трансформировать энергию определенного физического поля (электрического, магнитного, теплового и т. п.) в различные механические эффекты изменения геометрических размеров тел (пьезоэффект, сплавы с памятью формы, магнитострикционные и другие физические эффекты).
2.3.2 Интеллектуализация Основой интеллектуализации мехатронных и робототехнических систем в первую очередь являются интеллектуальные системы управления. Они априорно ориентированы на работу в условиях неполной и нечеткой исходной информации, неопределенности внешних возмущений и среды функционирования. Такие повышенные требования к системам управления диктуют необходимость привлечения нетрадиционных подходов к управлению с использованием методов искусственного интеллекта и современных информационных технологий. В отличие от традиционных систем управления интеллектуальные системы ориентированы на обработку и использование знаний. Знания - это закономерности предметной области (принципы, связи, законы), полученные в результате практической деятельности и профессионального опыта, позволяющие специалистам ставить и решать задачи в этой области. Современные информационные технологии обладают алгоритмами, позволяющими формировать, обрабатывать и использовать знания для решения задач управления сложными объектами. Построенные таким образом системы управления называются интеллектуальными. Класс интеллектуальных систем определяется тем, в какой степени система обеспечивает выполнение следующих пяти принципов организации интеллектуальных систем управления: - наличие тесного информационного взаимодействия управляющих систем с реальным внешним миром и использование специально организованных информационных каналов связи; - принципиальная открытость систем для повышения интеллектуальности и совершенствования собственного поведения;
- сохраняемость функционирования (возможно, с некоторой потерей качества или эффективности) при разрыве связей или потере управляющих воздействий от высших уровней иерархии управляющей структуры. Прокомментируем смысл выделенных пяти принципов, отметив их исключительную важность с точки зрения оценки поведения интеллектуальных систем управления. Первый принцип подчеркивает непосредственную связь интеллектуальных управляющих систем с внешним миром. Находясь в непрерывном взаимодействии с внешнем миром, интеллектуальные системы получают из него всю необходимую информацию для принятия решений и пополнения знаний. Сама управляющая система в свою очередь может оказывать на внешний мир активное воздействие в результате реализации собственного поведения. Модель знаний о внешнем мире интеллектуальной системы должна предполагать возможность изменений внешнего мира и знаний о нем в результате воздействий на него системы. Выполнение принципа информационного взаимодействия системы с внешним миром означает, что любые упрощения модели состояний, вероятностных описаний, игр автоматов со средой для представления событий реального внешнего мира непригодны. Именно в этом и состоит специфика систем управления рассматриваемого класса. Принципиальная открытость систем в соответствии со вторым принципом обеспечивается наличием таких подсистем высшего ранга в иерархической структуре, как самонастройка, самоорганизация и самообучение. Знания интеллектуальной системы управления состоят из двух частей - постоянных (проверенных) знаний, которыми система обладает и постоянно пользуется, и временных (проверяемых) знаний, в которых системы не уверена, с которыми она экспериментирует в процессе обучения. Знания второго типа либо отбрасываются системой, либо переходят в знания первого типа в зависимости от результатов анализа своего поведения во внешнем мире. Выполнение второго принципа требует организации в управляющей системе процесса приобретения и пополнения знаний. В соответствии с третьим принципом управляющую систему нельзя считать в достаточной мере интеллектуальной, если она не обладает возможностью прогноза изменений самого внешнего мира и собственного в нем поведения. Система без прогноза, функционирующая в динамически меняющемся внешнем мире, может попасть в критическую ситуацию, из которой не сможет найти выхода из-за временных ограничений на работу механизмов формирования управляющих воздействий, определяющих ее поведение, адекватное сложившейся ситуации. Четвертый принцип позволяет наметить пути построения моделей сложных управляющих систем в тех случаях, когда неточность знаний о модели объекта или о его поведении можно скомпенсировать увеличением числа уровней интеллектуальности, а также использованием совершенных механизмов принятия решений в условиях неопределенности в соответствующих алгоритмах управления. И, наконец, пятый принцип устанавливает лишь частичную потерю интеллектуальности (но не прекращение функционирования) при отказах в работе высших уровней иерархии системы. Сохранение автономного функционирования в рамках более простого (автономного) поведения системы, характерного для нижних уровней структуры управления, также чрезвычайно важно для автономно функционирующих систем в реальном внешнем мире. Приведенные пять принципов организации структуры интеллектуальной системы управления определяют класс исследуемых систем. Можно уточнить теперь само понятие «интеллектуальность системы управления», а также ввести понятие «уровень» и «степень интеллектуальности». Система управления, не имеющая базы знаний, неспособная к самообучению и адаптации, не умеющая прогнозировать события и построенная с использованием только методов классической теории автоматического управления (ТАУ), имеет степень интеллектуальности в малом. Система управления, имеющая базу знаний, способная к самообучению и адаптации, но не умеющая прогнозировать события, имеет степень интеллектуальности в большом. Система управления, имеющая базу знаний, способная к самообучению, адаптации и прогнозу событий называется интеллектуальной в целом. Определение степени интеллектуальности в малом, в большом и в целом введено по аналогии с устойчивостью в малом, большом и целом для классических систем автоматического управления. Известны два основных направления интеллектуализации мехатронных систем: _ разработка высокоскоростных аппаратных средств вычислительной техники; _ разработка специальных алгоритмов на основе современных методов и технологий обработки знаний. Россия, например, идет по пути использования в основном второго направления, в то время как Япония предпочитает в основном первый путь интеллектуализации. 2.3.3Миниатюризация Переходим к рассмотрению третьего квалификационного признака развития мехатронных и робототехнических систем _ миниатюризации. Сегодня вопросы миниатюризации являются ключевыми во всех отраслях промышленности _ микроэлектронике, нанотехнологиях, генетике и др. Микроэлектроника обеспечила существенное развитие мехатроники. Современные микроэлектронные устройства открыли принципиально новые возможности для объединения (интегрирования) механики и электроники, которые по своему уровню значительно превосходят существовавшую ранее электромеханику. Микроэлектроника играет ключевую роль в реализации машин нового поколения _ микроэлектромеханических систем (МЭМС) или микросистемных технологий (MST). МЭМС (или MEMS) _ конструктивно представляют сформированные на одной подложке датчики, исполнительные механизмы, устройства управления с размерами элементов до нескольких единиц микрон и менее, имеющие, как правило, трехмерную структуру. Они изготавливаются большей частью по полупроводниковой технологии: поверхностная и объемная микрообработка материалов (поликристаллический кремний), LIGA и SIGA _ технологии, а также MUMPs _ процесс. Микромашины не собирают из готовых деталей, а целиком выращивают слой за слоем на кремниевой подложке, применяя технологии осаждения слоев поликремния (поликристаллического кремния) и двуокиси кремния, фотолитографии, травления и планаризации (сглаживания), т. е. те технологии, что давно применяются для изготовления микроэлектроники. В конце технологического процесса изготовления микромашины все ее детали уже находятся на своих местах в правильном соединении между собой, но двигаться еще не могут, потому что как бы «утоплены» в толстом слое двуокиси кремния, которую необходимо вытравить кислотой. Толщина слоев поликремния 1_2 микрона, т. е. это _ толщина шестерней, маховиков, шатунов, рычагов, собачек, храповиков, пружин и прочих составляющих механизма. В 1994 году инженеры из университета Висконсин-Мэдисон создали микродвигатель с размером ротора 140 мкм (0,14 мм), дающий почти 150 тысяч оборотов в минуту в течение 24 часов и питающийся электростатическим электричеством. Широкое применение MST-технологии нашли при разработке микророботов. Микророботы по внешнему виду могут быть копией макророботов, но чаще на них совершенно не похожи. По определению микроробот _ это микроэлектромеханическое устройство с программируемой последовательностью действий и способностью выполнять основные операции с точностью от 0,1 мкм до 1 нм и занимающее объем кратный 10_3 м3 (1 мм3). Микроробототехника теснейшим образом связана с нанотехнологиями, обеспечивая микроперемещение микрообъектов. В настоящий момент основной проблемой в микротехнологиях и микросистемной технике является разработка единых технологических подходов к изготовлению всех подсистем. Только единый подход к производству различных по функциональному назначению и составу подсистем позволит реализовать задачи, на решение которых нацелено создание микроустройств. Наукой и техникой пройден пока только первый этап развития микросистем _ создание микроустройств обработки информации, принятия решений и управления _ микроэлектроники. Эти достижения явились базой для работ второго этапа построения микросистем _ создания компактных микроустройств и микросистем с использованием единого технологического цикла при изготовлении сенсорной, управляющей и силовой подсистем. В последние годы различных странах появилось большое количество экспериментальных микроустройств и микросистем, нацеленных на решение задач в различных областях науки и техники. Происходит их дальнейшая миниатюризация, расширение их функциональных возможностей, при этом создаются универсальные технические решения, которые можно без существенных изменений применять как в военной, так и в гражданской области. Но в то же самое время микроустройства второго этапа развития микросистемотехники строятся в виде модульных схем, где различные элементы подсистем могут быть выполнены в виде отдельных микросхем различного функционального назначения, соединенных между собой электрическими цепями. На третьем этапе прогнозируется создание микроустройств распределенного типа, во многом копирующих структуры живых организмов (биоморфы). Работы по третьему этапу уже начались, и появились определенные успехи. При этом следует заметить, что работы на всех трех этапах могут идти как самостоятельно, так и во взаимодействии и взаимодополнениями с другими этапами. Второй этап развития микросистемной техники стал возможен лишь с появлением таких технических решений, как сканирующие туннельные микроскопы (СТМ). Основные положения нового направления научно-технической революции были намечены в хрестоматийной речи отца нанотехнологий Ричарда Фейнмана «There's Plenty of Room at the Bottom» («Там внизу - море места»), произнесенной им в Калифорнийском технологическом институте в 1959 году. Тогда его слова казались фантастикой, потому что не существовало технологии, позволяющей оперировать отдельными атомами. Такая возможность появилась лишь в 1981 году, когда в швейцарском отделении IBM был разработан сканирующий туннельный микроскоп - прибор, чувствительный к изменениям туннельного тока между поверхностью материала и сверхтонкой иглой. IBM, Fujitsu и Intel за последние два года потратили на нанотехнологии миллиард долларов. Нанотехнологии в основном применяются для создания особых материалов - солнцезащитных экранов, композитных материалов для автомобилей, устойчивых к загрязнению тканей, самоочищающихся оконных стекол и т. д. Уже не одно десятилетие обсуждается возможность создания самовоспроизводящихся машин. В последнее время в области микро- и миниробототехники на стыке таких, казалось бы, разных областей знаний, как микроэлектроника, микросистемотехника, нейрокибернетика, бионика и биология появились новые направления, которые можно объединить под названием биоробототехника. Наиболее интенсивный характер этих работ наблюдается в основном применительно к военной робототехнике. Основные исследования в данном направлении выполнялись в рамках программ «Управляемые биологические системы» и «Биоподобные системы», финансируемые агентством перспективных оборонных исследований ДАРПА министерства обороны США. Одним из перспективных направлений современной биомикро-миниробототехники является направление, связанное с созданием роботов-биогибридов. Суть этого подхода заключается в том, что управление осуществляется живым организмом - насекомым или мелким животным, путем воздействия электрическими сигналами или иным способом на его нервную систему. Такие биомикро- или биоминироботы могут использоваться как мобильные устройства для решения целого спектра задач. В частности, они могут быть использованы для решения задач химической и радиационной разведки, поиска людей под завалами при ликвидации последствий аварий и катастроф, для охраны и наблюдения за объектами, а также для обнаружения взрывных устройств и разминирования. В настоящее время для решения многих задач весьма перспективно использование мобильных биороботов, создаваемых на основе биоорганизмов, высокочувствительных сверхминиатюрных сенсорных устройств и управляющих электронных систем. При этом могут создаваться биотехнические или бионические системы разной степени сложности. В наиболее простом случае биообъект может нести систему, отслеживающую его передвижения, и необходимый набор датчиков для оценки состояния окружающей среды, информация от которых или передается в стационарную систему сбора и обработки информации по проводным и беспроводным каналам связи, или может регистрироваться аппаратурой, размещаемой на биообъекте. В Больших успехов в области микромехатроники и нанотехнологий добились Германский институт микромеханики (созданный в рамках системы Фраунгоферовских институтов) и фирма Klocke Nanotechnik (Германия), разработавшие пьезоуправляемый двигатель (ход которого составляет несколько нанометров) для электронной микроскопии, микробиологии, микросборки, «интеллектуальный вал двигателя» и т. д. Обобщая изложенное, можно констатировать, что мехатроника как новое научно-техническое направление символизирует и воплощает общие тенденции развития техники в XXI в. - междисциплинарную интеграцию, интеллектуализацию и миниатюризацию. |