Математика 33. Векторное поле. Векторные линии
 Скачать 0.9 Mb. Скачать 0.9 Mb.
|

 Математика Математика33. Векторное поле. Векторные линии.  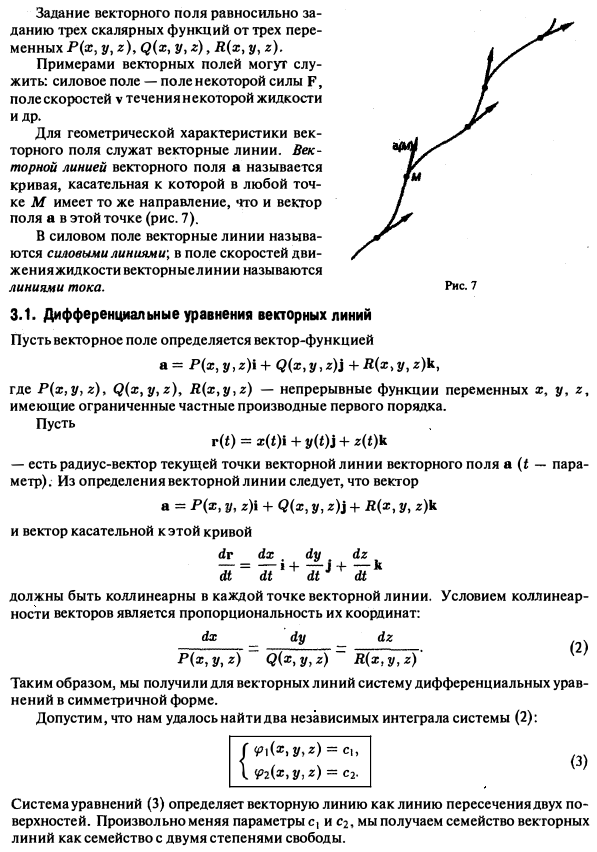 34. Поток векторного поля. Методы вычисления потока векторного поля. Потоком векторного поля через поверхность S называется поверхностный интеграл второго рода от векторной функции A (x, y, z) по поверхности S,  , где n – единичный вектор внешней нормали к поверхности S. Еще один способ обозначения связан с введением вектора dS = n dS, величина которого равна площади элемента поверхности dS, а направление определяется вектором n. Рисунок 1 иллюстрирует понятие потока векторного поля A через малый элемент поверхности. Поток поля принимает наибольшее значение, если вектор A направлен перепендикулярно к поверхности. . Рис. 1. Поток векторного поля A через бесконечно малый элемент поверхности dS равен скалярному произведению 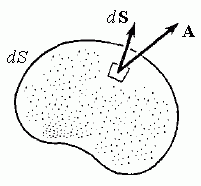  . . Вычисление потока векторного поля сводится к вычислению суммы трех двойных интегралов   где плоские области  35. Дивергенция векторного поля. Рассмотрим произвольную точку M (x, , y, z) и опишем вокруг этой точки замкнутую поверхность ΔS. 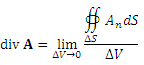 . . Если сопоставить определение дивергенции с определениями плотности распределения массы или плотности распределения заряда, то можно сказать, что дивергенция векторного поля A представляет собой плотность распределения потока векторного поля A. которое в явном виде связывает дивергенцию электрического поля E с плотностью ρ распределения зарядов – источников электрического поля. Иначе говоря, дивергенция векторного поля представляет собой плотность распределения источников поля. 36. Формула Остроградского-гаусса в векторной форме. Поток векторного поля 37. Циркуляция векторного поля. Пусть вдоль замкнутого контура L задано векторное поле A. Криволинейный интеграл второго рода от вектора A по контуру L называется циркуляцией векторного поля A и обозначается символическим выражением Направление обхода контура считается положительным, если при движении по контуру ограниченная им область остается слева. 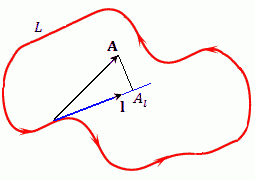 Отметим, что вектор Таким образом, циркуляция векторного поля A записывается в любой из нижеприведенных форм:  38. Ротор векторного поля. Ротор (Вихрь) — векторный оператор векторного поля, показывает насколько и в какую сторону закручено поле в каждой точке. Ротор обозначается значком rot. В декартовой системе координат ротор вычисляется по след. формуле: rot(i⃗Fx + j⃗Fy + k⃗Fz)=i⃗  Для простоты восприятия можно представлять ротор как  Или как детерминант следующей матрицы:  где i, j и k — единичные векторы для осей x, y и z соответственно. Векторное поле, ротор которого равен нулю в любой точке, называется потенциальным (безвихревым). Физическая интерпретация Например, если в качестве векторного поля взять поле скоростей ветра на Земле, то для циклона, вращающегося по часовой стрелке, ротор будет направлен вниз, а для циклона, вращающегося против часовой стрелки — вверх. В тех местах, где ветры дуют равномерно и прямолинейно, ротор будет равен нулю. Основные свойства:
rot(aF+bG)=arot F+brot G для любых векторных полей F и G и для всех действительных чисел a и b.
rot φF=grad φ ×F+φrot F.
div rot F=0
rot F=0⇔F=grad φ
∮CFdl=∫rot FdS 39. Криволинейные интегралы первого рода. А=М₀, М₁, М₂…  =В =В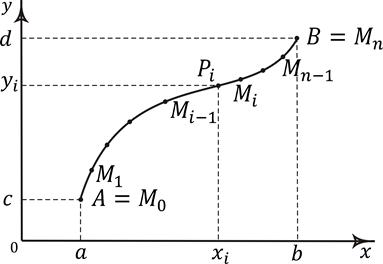 Из т. М восстановим перпендикуляр до пересечения с отображением f (M)  ,(1) где ,(1) где  – длина дуги. – длина дуги. 
  (2) (2)Определение. Криволинейным интегралом I рода называется предел интегральной суммы (1) при  , где , где  – длина наибольшей дуги – длина наибольшей дуги  . .Свойства: 1°. Криволинейный интеграл I рода не зависит от направления.  2°. Если т. С принадлежит (L)  , то криволинейный интеграл I рода по кривой (АВ) равен сумме криволинейных интегралов. , то криволинейный интеграл I рода по кривой (АВ) равен сумме криволинейных интегралов. – геометрическая интерпретация криволинейного интеграла I рода. – геометрическая интерпретация криволинейного интеграла I рода.3°. Рассмотри кривую L для которой задана непрерывная ф-я z=f (M) и непрерывная производная, т.е. гладкая кривая. Если восстановить перпендикуляры оси OZ, то получится цилиндрическая поверхность, ограниченная снизу кривой L, сверху z=f(M) и образующая – это прямые параллельные оси oz. Справа огранич. прямой ВВ´, слева АА´. Если дробление кривой АВ будет достаточно мелким, то дуги превращаются в отрезки.   При мелком разбиении криволинейный интеграл I рода приближенно равен определенному интегралу, а в геометрической интерпретации площадь цилиндрической поверхности численно равна площади криволинейной трапеции. Криволинейный интеграл I рода численно равен площади цилиндрической аповерхности, которая ограничена кривой L в плоскости XOY, сверху z=f(M) (А´В´), слева образующей АА´, справа ВВ´. 19. Уравнения с разделяющимися переменными. Уравнения первого порядка, которые можно записать P(y)dy = Q(x)dx называются уравнениями с разделяющимися переменными. Для решения диф уравнения с раздел. Переменными необходимо все переменные с «х» оставить в одной части, с «у» в другой и проинтегрировать обе части полученного равенства:     20. Однородные дифференциальные уравнения первого порядка. Однородным уравнением первого порядка называется уравнение вида:  Для проверки того факта, что дифференциальное уравнение первого порядка является однородным, нужно ввести некоторую величину k и заменить переменную y на ky и переменную x на kx. После упрощения полученного выражения, если k сократится, то исследуемое уравнение – однородное дифференциальное уравнение.  16. Линейные дифференциальные уравнения первого порядка. Линейные дифференциальные уравнения первого порядка – это уравнения вида p(х)y´+q(х)y = t(x) (1). Для решения линейных уравнений существует 2 метода:
В уравнении (1) отбрасывается правая часть и уравнение решается как уравнение с разделяющимися переменными.  , умножаем обе части на dx: p(x) dy = -q(x)y dx, умножаем обе части на , умножаем обе части на dx: p(x) dy = -q(x)y dx, умножаем обе части на  : :  , ,Предположим, что  I, тогда I, тогда  ; ;  . (2) . (2)Находим производную равенства (2) и подставляем в равенство (1), решая которое найдем решение уравнения (1)
Находим решение y в виде произведения двух функций y = u(x)v(x), тогда производная: y´ = u´(x)v(x)+u(x)v´(x). Подставляем производную y в исходное уравнение. 21. Уравнение Бернулли. Уравнение Бернулли – это уравнение, которое задается в виде p(х)y´+q(х)y = t(x) – линейное уравнение. P(x), q(x) –некоторые функции, которые зависят от х. Если линейное уравнение включает в себе помимо функции t(x) в правой части степень функции y, то линейное уравнение называется уравнением Бернулли:  В уравнении (1) разделим обе части на y в степени n:  Воспользуемся методом замены.   , тогда уравнение (1) будет иметь вид: , тогда уравнение (1) будет иметь вид: – линейное уравнение, которое можно решить двумя методами. Возвращаясь к первоначальной переменной y путем обратной замены получим общий интеграл уравнения Бернулли. – линейное уравнение, которое можно решить двумя методами. Возвращаясь к первоначальной переменной y путем обратной замены получим общий интеграл уравнения Бернулли.22. Уравнения в полных дифференциалах. Если левая часть уравнения M(x, y)dx+N(x, y)dy=0 представляет собой полный дифференциал некоторой функции V(x, y), т.е. если: M(x, y)dx+N(x, y)dy= dV(x, y). В этом случае можно записать так: dV(x, y)=0, откуда интегрированием получаем общий интеграл V(x, y) = 0. Функция полного дифференциала V(x, y) не всегда видна явно, поэтому необходимо условие, которое подтверждает, что уравнение является уравнением полных дифференциалов. Т. Для того, чтобы дифференциальное выражение M(x, y)dx+N(x, y)dy, где функции M(x, y) и N(x, y) определены и непрерывны в области плоскости и имеют в ней непрерывные частные производные  и и  , представляло собой полный дифференциал необходимо и достаточно чтобы во всех точках области было выполнено условие: , представляло собой полный дифференциал необходимо и достаточно чтобы во всех точках области было выполнено условие:  . .23. Дифференциальные уравнения высших порядков. Дифференциальные уравнения порядка выше первого называются ДУ высших порядков. ДУ второго порядка в общем случае записывается в виде F(x;y;y’;y’’)=0 Или, если это возможно, в виде, разрешенном относительно старшей производной: y’’=f(x;y;y’). РешениемДУ y’’=f(x;y;y’)называется всякая функция у= ,которая при подстановке в уравнение обращает его в тождество. Общим решением ДУ y’’=f(x;y;y’) называется функция у= Аналогичные понятия и определения имеют место для ДУ n-го порядка, которое в общем виде записывается как F(x;y;y’;y’’;…; 24. Дифференциальные уравнения высших порядков, решаемые путем непосредственного интегрирования. Рассмотрим уравнение n-го порядка: (1) Оно решается непосредственным интегрированием.    . . . . . . . . При этом постоянные интегрирования C1, C2, ... Cn входят в результат в виде многочлена степени n: 25. Линейные однородные дифференциальные уравнения. Определения и общие свойства. 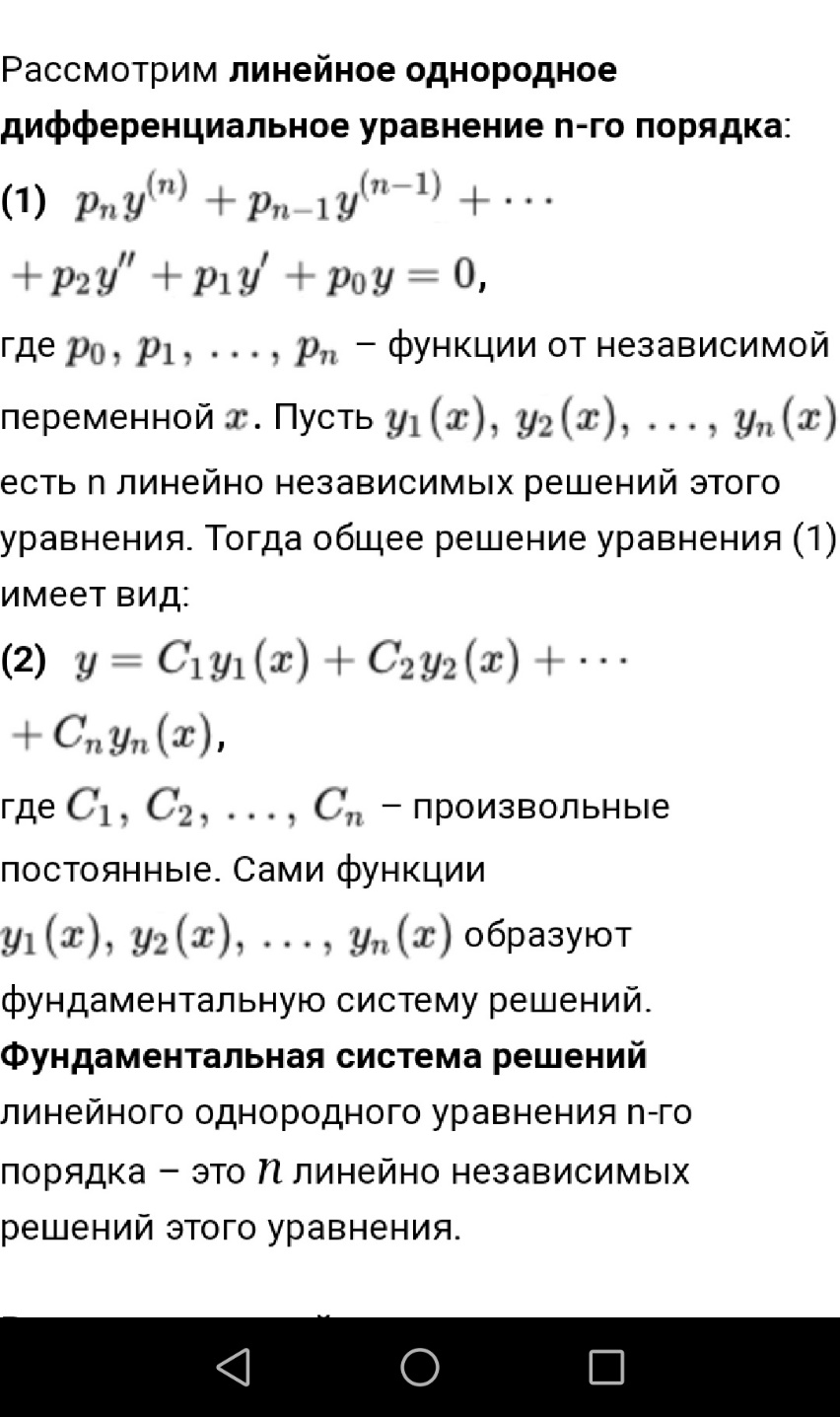 40. Криволинейные интегралы второго рода. 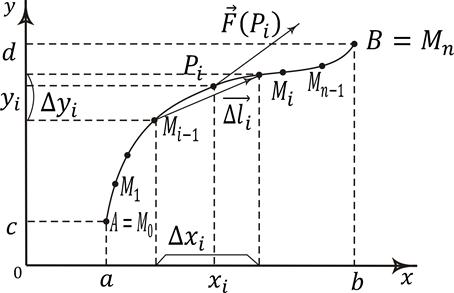 Определение. Криволинейным интегралом второго рода от функции  или в другой записи:  , ,где векторный элемент касательной к контуру интегрирования в точке и скалярное произведение Функция Если AB – замкнутая кривая, т.е. точка B совпадает с точкой A, из двух возможных направлений обхода замкнутого контура AB условимся называть положительным то направление, при котором область, лежащая внутри этого контура, остается слева по отношению к точке, совершающей обход. Противоположное направление обхода контура AB условимся называть отрицательным. Криволинейный интеграл по замкнутому контуру |