ДОСЛІДЖЕННЯ ХАРАКТЕРИСТИК ПОСЛІДОВНОГО З’ЄДНАННЯ ДИНАМІЧНИХ ЛАНОК. ЛР2_Бондарук М.В._Бригада1. Методичні вказівки до виконання роботи Послідовне зєднання двох інерційних ланок першого порядку
 Скачать 271.03 Kb. Скачать 271.03 Kb.
|

|
Лабораторна робота 2 ДОСЛІДЖЕННЯ ХАРАКТЕРИСТИК ПОСЛІДОВНОГО З’ЄДНАННЯ ДИНАМІЧНИХ ЛАНОК Мета роботи. 1. Засвоїти методику розрахунку параметрів динамічної системи, що складається з послідовного з'єднання ланок, експериментального дослідження характеристики системи послідовно з’єднаних ланок. 2. Вивчити диференціальні рівняння і динамічні характеристики ланок інтегрування та інерційних ланок першого порядку. 3. Вивчити методику розрахунку передатних функцій при послідовному з'єднанні динамічних ланок. Методичні вказівки до виконання роботи Послідовне з’єднання двох інерційних ланок першого порядку. Систему, що складається з двох послідовно з’єднаних інерційних ланок, зображено на рис. 2.1. 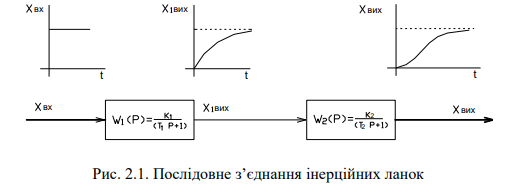 Передатну функцію системи записуємо у вигляді:  Із передатної функції можна визначити рівняння перехідної функції, користуючись таблицями перетворень Лапласа:   Рис. 2.2. Перехідна характеристика інерційної ланки другого порядку Рис. 2.2. Перехідна характеристика інерційної ланки другого порядкуПередавальний коефіцієнт системи К* визначають з рис. 2.2 та за формулою:  Сталу часу Т2* знаходимо як піддотичну АС у точці перегину В кривої перехідної характеристики (див. рис. 2.2). Сталу часу Т1* визначаємо за формулою:  Тут S - площа заштрихованої площини на рис 2.2. Величину ХВВих/ розраховують за формулою:  Послідовне з'єднання інерційної ланки першого порядку і ланки інтегрування. При послідовному з'єднанні ланок вихідна величина попередньої ланки є вхідною величиною наступної. Так, для двох послідовно з’єднаних ланок, зображених на рис. 2.3, вихідна координата інерційної ланки першого порядку Х1вих є вхідною координатою для інтегруючої ланки. Передатна функція системи:  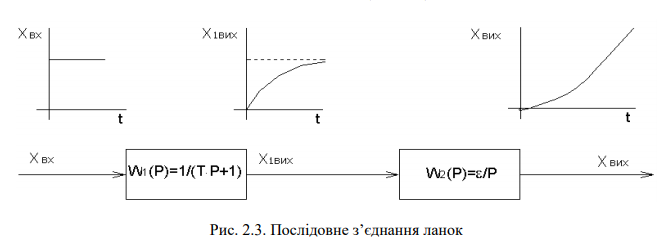 Перехідна функція з'єднання ланок має вигляд:  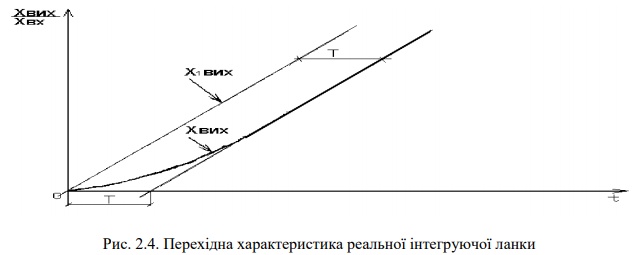 Чутливість інтегруючої ланки ε та стала часу Т визначають з графіка за рис.2.4. Виконання роботи згідно варіанту (Бригада №1) Графік 1  Рис. 2.5. Перехідна характеристика інерційної ланки другого порядку(1)       Передатна функція системи:  Рівняння перехідної функції:  Графік 2  Рис. 2.6. Перехідна характеристика інерційної ланки другого порядку(2)       Передатна функція системи:  Рівняння перехідної функції:  Графік 3  Рис. 2.7. Перехідна характеристика реальної інтегруючої ланки(1)  . . . .Передатна функція системи:  Перехідна функція з'єднання ланок:  Графік 4  Рис. 2.8. Перехідна характеристика реальної інтегруючої ланки(2)  . . . .Передатна функція системи:  Перехідна функція з'єднання ланок:  |