лр 3 +. Моделирование непрерывных и цифровых систем автоматического управления
 Скачать 0.56 Mb. Скачать 0.56 Mb.
|

Институт № 3 «Системы управления, информатика и электроэнергетика» Кафедра №301 «Системы автоматического и интеллектуального управления» Направление подготовки 24.05.06 «Системы управления летательными аппаратами» О Т Ч Е Т
 Название: Моделирование непрерывных и цифровых систем автоматического управления Дисциплина: Моделирование систем
Москва, 2023 Цель: Проверка владения методами синтеза и анализа непрерывных, цифровых систем автоматического управления (САУ) с использованием средств САПР. Задание 1: Осуществить параметрический синтез контуров непрерывной САУ, заданной структурной схемой (рис. 1), удовлетворяющих следующим требованиям к показателям качества переходной функции: Внутренний контур: – Перерегулирование σ <5%; – Время переходного процесса минимально; Внешний контур: – Перерегулирование σ <0%; – Время переходного процесса минимально.  Рисунок 1 – Структурная схема непрерывной иерархической САУ Исходные данные (вариант №3):  , ,  , ,  . .Ход работы: Создадим модель разомкнутого внутреннего контура САУ (рис. 2) и определим по ней передаточную функцию разомкнутой системы:  Рисунок 2 – Модель разомкнутого внутреннего контура САУ W = tf(linsys1) W = From input "Step1" to output "Integrator1": 144 ------------------- s^3 + 23 s^2 + 90 s Name: Linearization at model initial condition Continuous-time transfer function. Построим корневой годограф для внутреннего контура системы (рис. 3): rlocus(linsys1), sgrid 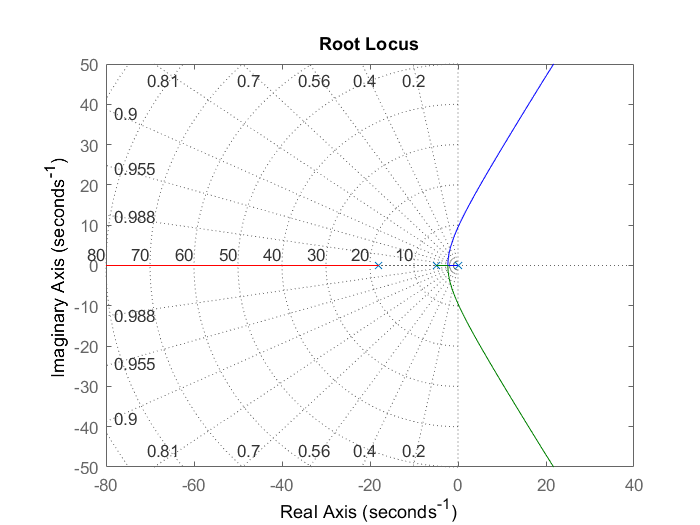 Рисунок 3 – Корневой годограф внутреннего контура системы Выберем значение коэффициента усиления  , обеспечивающее заданные показатели качества к переходной функции: , обеспечивающее заданные показатели качества к переходной функции:[k, poles]=rlocfind(linsys1) selected_point = -2.1656 + 2.1823i k = 1.2208 poles = 3×1 complex -18.6873 + 0.0000i -2.1564 + 2.1811i -2.1564 - 2.1811i Построим переходный процесс (рис. 4) и определим прямые показатели качества системы (таблица 1):  Рисунок 4 – Переходный процесс внутреннего контура системы Таблица 1 – Прямые показатели качества переходного процесса
Построим амплитудно-частотную характеристику внутреннего контура системы (рис. 5):  Рисунок 5 – ЛАЧХ внутреннего контура системы Определим значение частоты, начиная с которой выполняется условие для амплитудно-частотной характеристики  : : Определим передаточную функцию замкнутого внутреннего контура системы: W = tf(linsys1) W = From input "Step1" to output "Integrator1": 175.8 --------------------------- s^3 + 23 s^2 + 90 s + 175.8 Name: Linearization at model initial condition Continuous-time transfer function. Создадим модель разомкнутого внешнего контура САУ (рис. 6) и определим по ней передаточную функцию разомкнутой системы:  Рисунок 6 – Модель разомкнутого внешнего контура САУ W = tf(linsys1) W = From input "Step" to output "Transfer Fcn2": 21.1 ------------------------------- s^4 + 23 s^3 + 90 s^2 + 175.8 s Name: Linearization at model initial condition Continuous-time transfer function. Построим корневой годограф для внешнего контура системы (рис. 7): rlocus(linsys1), sgrid  Рисунок 7 – Корневой годограф внутреннего контура системы Выберем значение коэффициента усиления  , обеспечивающее заданные показатели качества к переходной функции: , обеспечивающее заданные показатели качества к переходной функции:[k, poles]=rlocfind(linsys1) selected_point = -1.4437 + 1.4121i k = 6.3613 poles = 4×1 complex -18.6614 + 0.0000i -1.4147 + 1.6623i -1.4147 - 1.6623i -1.5092 + 0.0000i Построим переходный процесс (рис. 8) и определим прямые показатели качества системы (таблица 2): 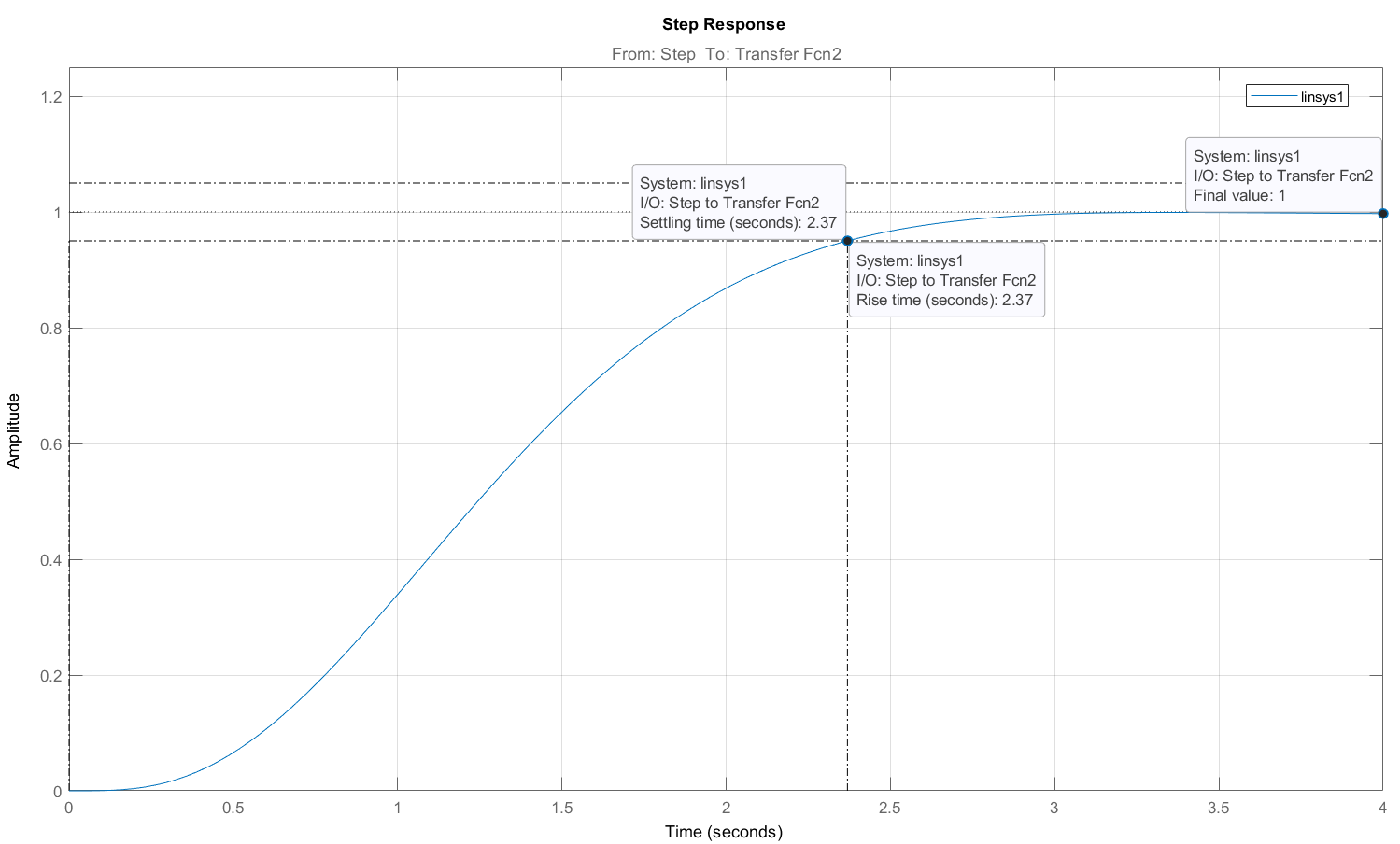 Рисунок 8 – Переходный процесс внешнего контура системы Таблица 2 – Прямые показатели качества переходного процесса
Построим амплитудно-частотную характеристику внешнего контура системы (рис. 9): 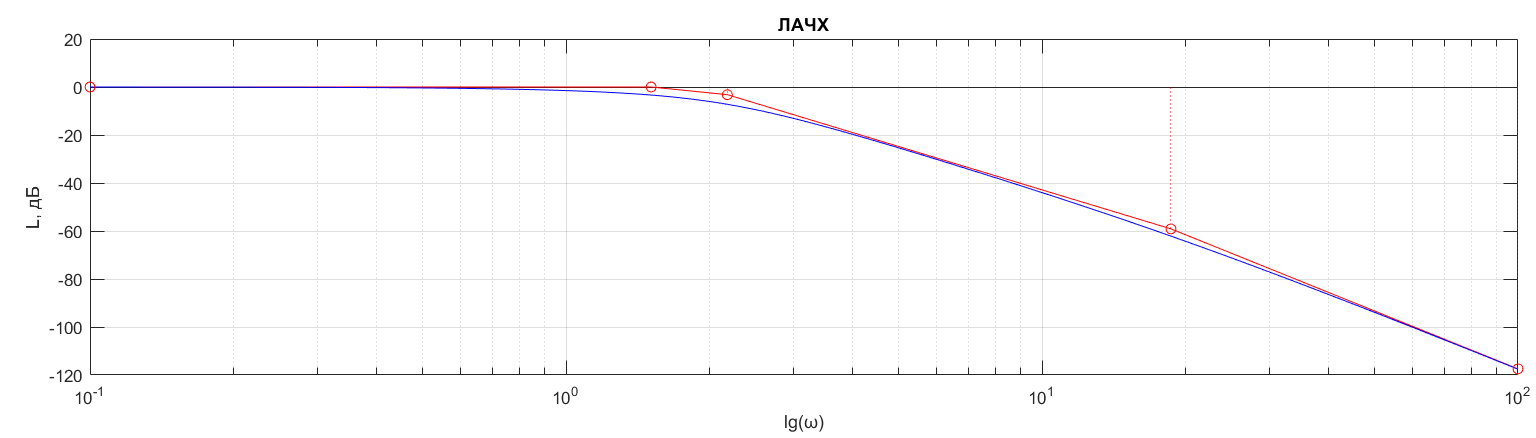 Рисунок 9 – ЛАЧХ внешнего контура системы Определим значение частоты, начиная с которой выполняется условие для амплитудно-частотной характеристики : Определим передаточную функцию замкнутого внутреннего контура системы: W = tf(linsys1) W = From input "Step" to output "Transfer Fcn2": 134.2 --------------------------------------- s^4 + 23 s^3 + 90 s^2 + 175.8 s + 134.2 Name: Linearization at model initial condition Continuous-time transfer function. Задание 2: Осуществить параметрический синтез и анализ цифровой САУ по непрерывному аналогу (рис. 1), структурная схема цифровой САУ представлена на (рис. 10).  Рисунок 10 – Структурная схема иерархической цифровой САУ Найдём период дискретности  для внутреннего контура: для внутреннего контура:T = pi/(3*9.164) T = 0.1143 Создадим модель цифрового внутреннего контура (рис. 11):  Рисунок 11 – Модель цифрового внутреннего контура САУ Выберем значение коэффициента усиления  для цифрового внутреннего контура (рис. 11), при котором обеспечивается минимальное время переходного процесса, а перерегулирования не превышает значения перерегулирования для непрерывного аналога внутреннего контура: для цифрового внутреннего контура (рис. 11), при котором обеспечивается минимальное время переходного процесса, а перерегулирования не превышает значения перерегулирования для непрерывного аналога внутреннего контура: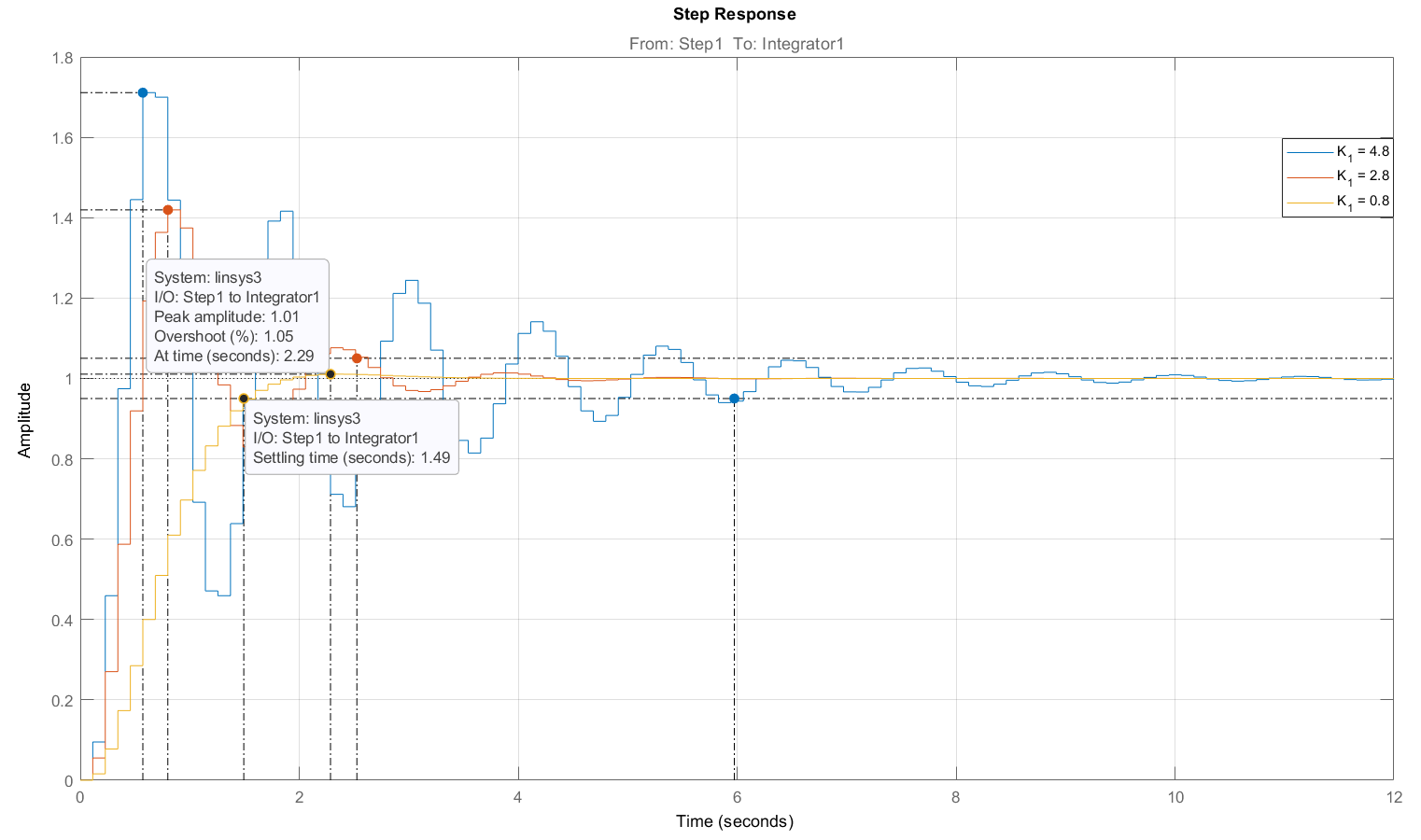 Рисунок 12 – Варьирование коэффициента в переходном процессе внутреннего контураНа основании представленных переходных процессов (рис. 12) коэффициент возьмем равным 0.8. Найдём период дискретности  : :T = pi/(3*4.02) T = 0.2605 Создадим модель цифрового внешнего контура (рис. 13):  Рисунок 13 – Модель цифрового внешнего контура САУ Выберем значение коэффициента усиления  для цифрового внешнего контура (рис. 13), при котором обеспечивается минимальное время переходного процесса, а перерегулирования не превышает значения перерегулирования для непрерывного аналога внешнего контура: для цифрового внешнего контура (рис. 13), при котором обеспечивается минимальное время переходного процесса, а перерегулирования не превышает значения перерегулирования для непрерывного аналога внешнего контура: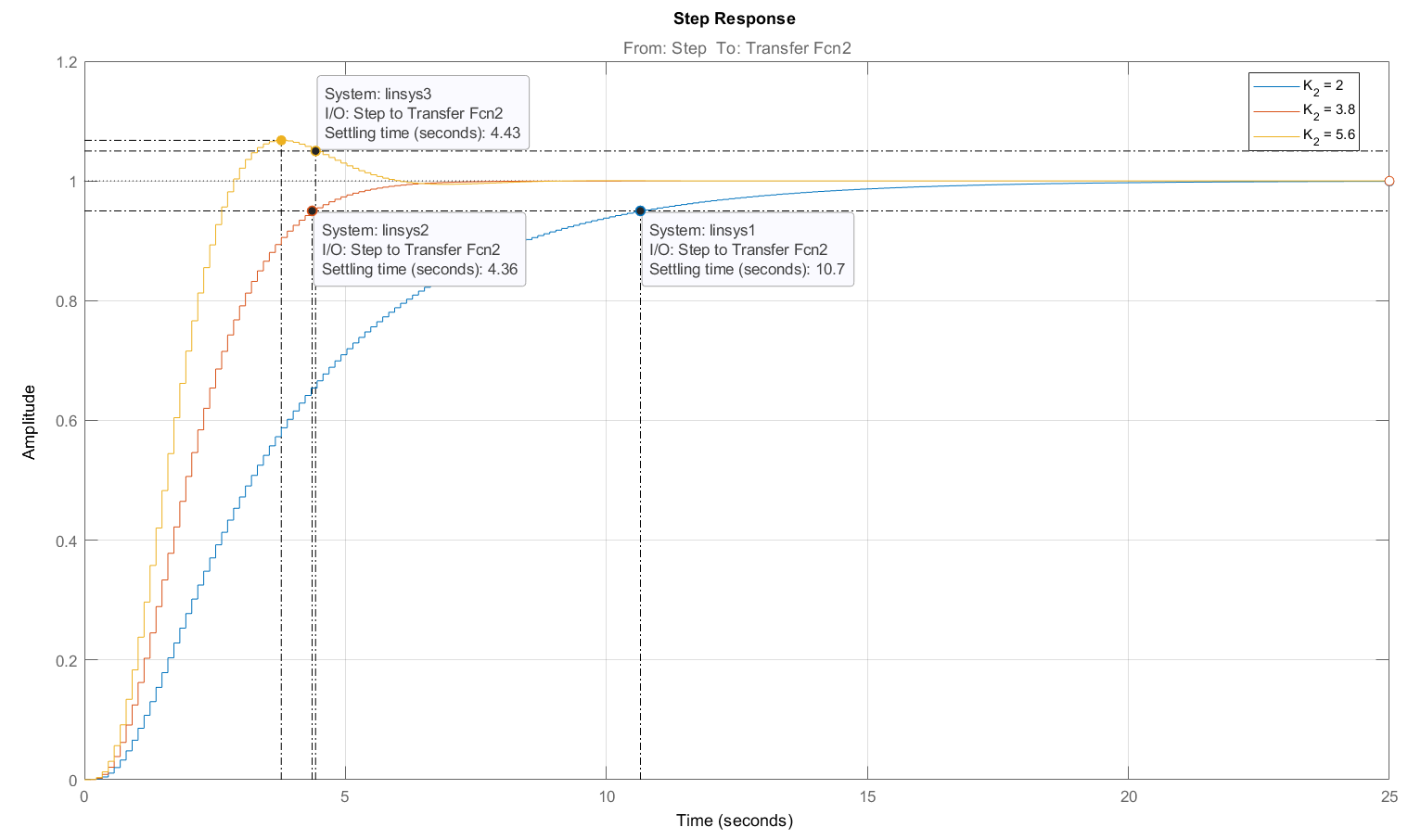 Рисунок 14 – Варьирование коэффициента в переходном процессе внутреннего контураНа основании представленных переходных процессов (рис. 14) коэффициент возьмем равным 3.8. Задание 3: На вход цифровой системы подать гармонический сигнал  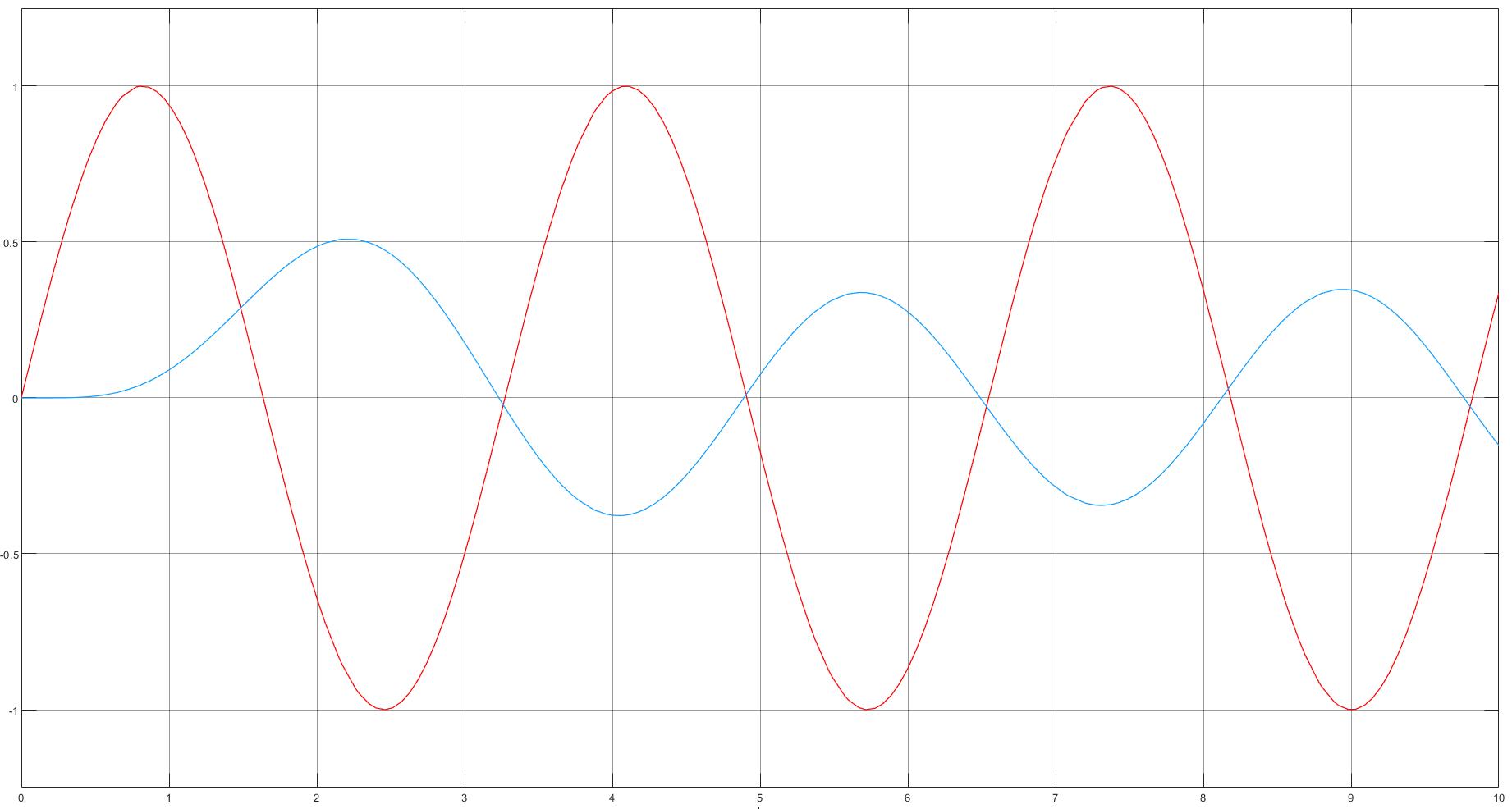 Рисунок 15 – Реакция системы на входной синусоидальный сигнал с частотой   Рисунок 16 – Реакция системы на входной синусоидальный сигнал с частотой  Вывод В результате выполнения лабораторной работы были получены навыки синтеза цифровых систем по непрерывному аналогу. Были построены корневые годографы внутреннего и внешнего контуров системы, по которым были определены коэффициенты регуляторов, удовлетворяющих заданным требованиям. Также были построены ЛАЧХ внутреннего и внешнего контуров, по котором были определены периоды дискретизации. Помимо этого, были построены графики реакций системы на входную синусоиду с различной частотой. |





