Лего. Представление модели Моя модель называется Танцующие птицы
 Скачать 2.11 Mb. Скачать 2.11 Mb.
|

|
Тема 2. Сборка и программирование основных конструкций LEGO Education WoDo и LEGO Education WoDo 2.0. Сборка роботов: Танцующие птицы, Рычащий лев, Порхающая птица, Спасение самолета, Спасение Великана, Непотопляемый парусник. Представление модели 1. Моя модель называется «Танцующие птицы» 2. В моей модели «оживают» птицы. Птицы танцуют, вращаясь вокруг своей оси 3. Моя модель приводится в движение система шкивов и ремень (ременная передача). Используется мотор для вращения малого зубчатого колеса. Малое зубчатое колесо вращает большое. Большое колесо вращает шкив и птицу. Шкив крутит ремень. Ремень крутит другую птицу. 4. Моя модель робота умеет вращать птиц, так чтобы они «танцевали». Можно менять скорость вращения и направление вращения. 5. Для этого я составил (- а) программу из следующих блоков (команд): 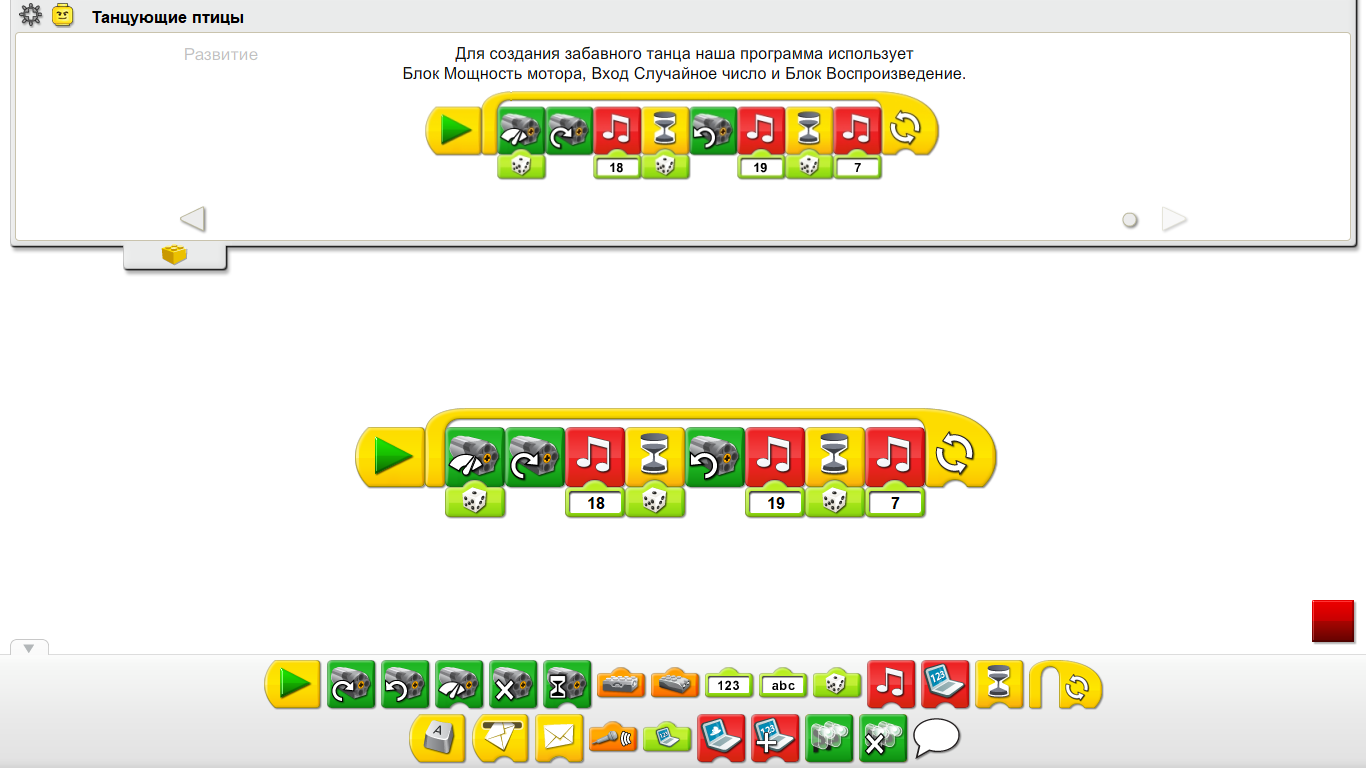 6. Я внёс (- ла) изменения в конструкцию модели робота: изменено положение ремня (ремень можно перекрестить), изменён размер шестерёнок. Изменение в программу.  7. Теперь модель моего робота изменилась и работает так: при изменении положения ремня, меняется направление движения птиц. При изменении размеров шестерёнок, меняется скорость вращения. При изменении программы: мощность мотора имеет фиксированную величину, а не случайную как в первый раз. Добавлены вращения. Теперь птицы будут делать повороты вокруг соей оси чаще. 8. Механизм, использованный в моей модели можно также использовать для создания часового механизма. Такой же принцип шестерёнок. Представление модели 1. Моя модель называется «Рычащий лев» 2. В моей модели «оживает» лев. Лев поднимается, опускается и рычит. 3. Моя модель приводится в движение мотор для вращения малого зубчатого колеса. Малое зубчатое колесо вращает коронное зубчатое колесо. Коронное колесо вращает ось, поднимающую передние ноги. 4. Моя модель робота умеет поднимать и опускать тело льва. 5. Для этого я составил (- а) программу из следующих блоков (команд): 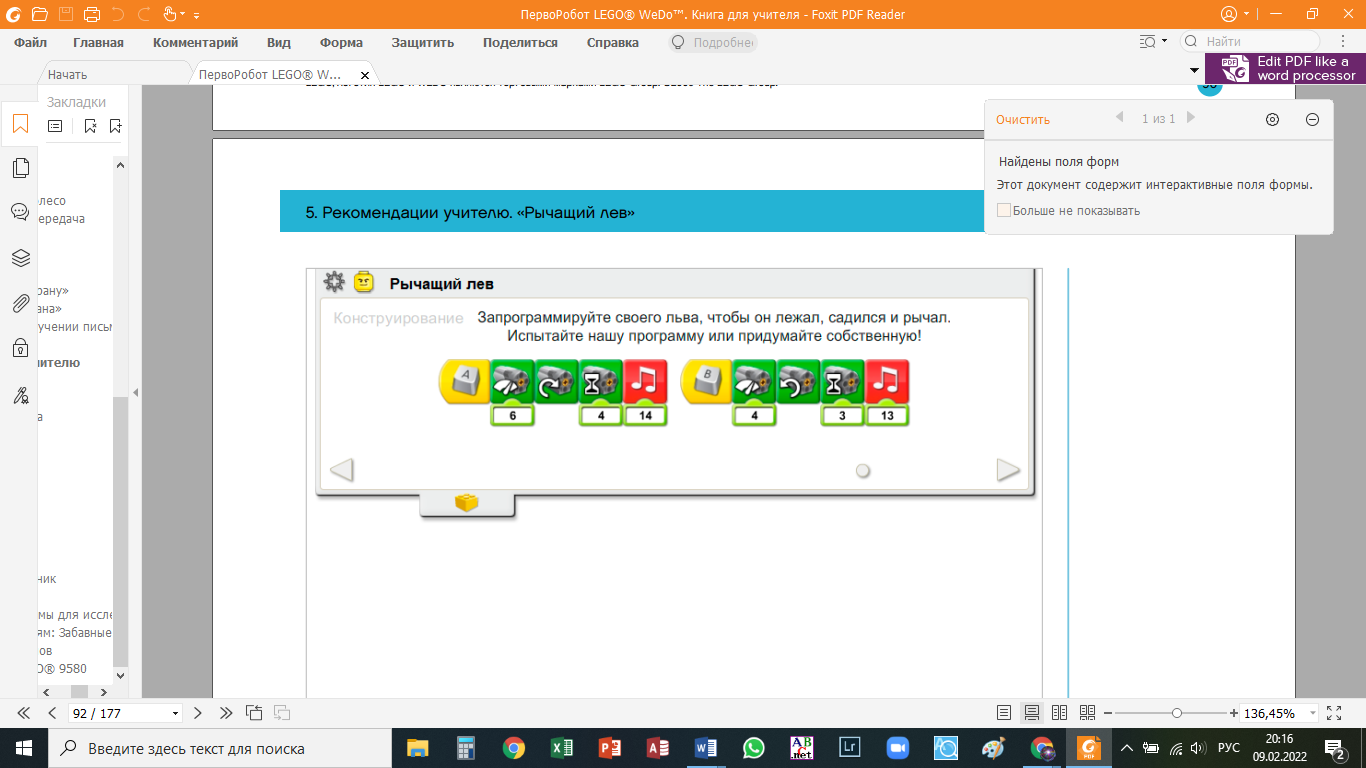 6. Я внёс (- ла) изменения в конструкцию модели робота: добавлен датчик движения, чтобы имитировать приближения какого-нибудь предмете (еда), при приближении которого лев ложится. Изменение в программу. 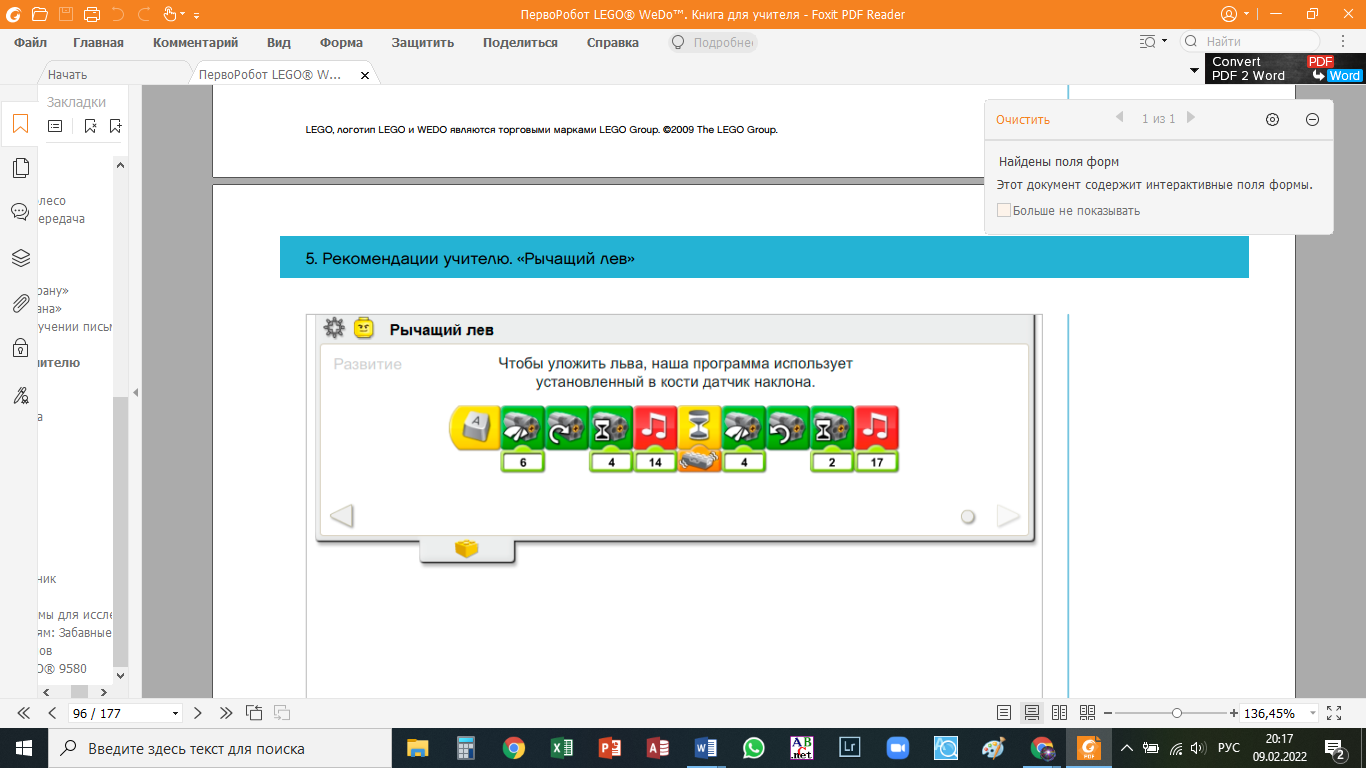 7. Теперь модель моего робота изменилась и работает так: в программу «Рычащий лев» внесены изменения и добавлен датчик наклона. После нажатия на клавиатуре (в английской раскладке) клавиши A программа включает на 0,4 секунды мотор по часовой стрелке при уровне мощности 6 и воспроизводит Звук 14. Затем программа ожидает, пока «еду» не наклонят в любую сторону, и после этого снижает мощность мотора до уровня 4, включает мотор на 0,2 секунды в обратном направлении (против часовой стрелки) и воспроизводит Звук 17. 8. Механизм, использованный в моей модели можно также использовать для создания модели поведения любого другого животного, изменив конструкцию и добавив другие звуки. Представление модели 1. Моя модель называется «Порхающая птица» 2. В моей модели «оживает» птица. Она поднимает голову и крылья, когда поднимается хвост и опускает голову и крылья, когда опускается хвост. 3. Моя модель приводится в движение сам человек, вручную опуская хвост. Тело птицы, её голова и хвост поворачиваются вокруг своих центров вращения (осей). При перемещении хвоста вверх-вниз ещё одна система рычагов приводит в движение крылья, каждое из которых поворачивается вокруг своей оси. То есть, каждое крыло также является рычагом. 4. Моя модель робота умеет махать крыльями и головой. 5. Для этого я составил (- а) программу из следующих блоков (команд): 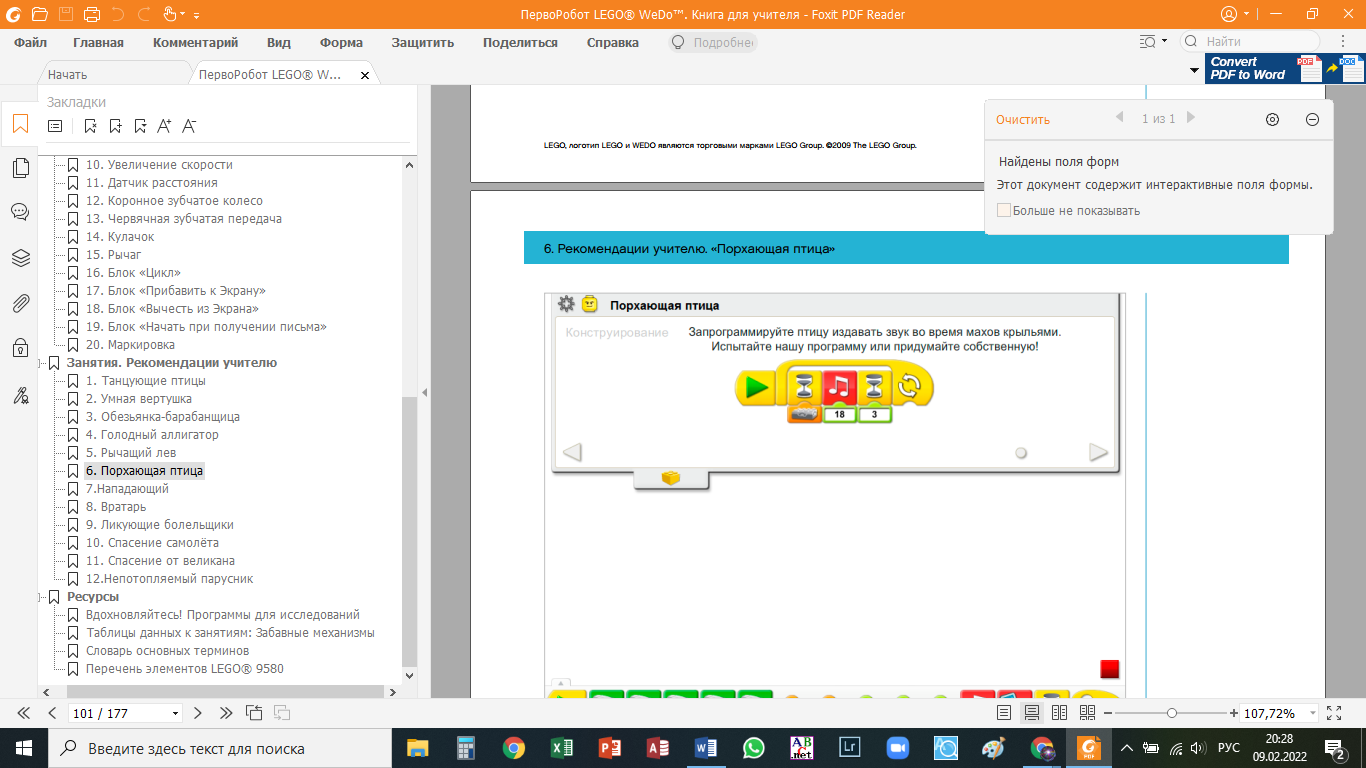 6. Я внёс (- ла) изменения: добавлен датчик движения  7. Теперь модель моего робота изменилась и работает так: программа «Порхающая птица» изменена не была, но в неё была добавлена программа для датчика расстояния. Теперь программа ожидает, когда клюв птицы активирует датчик расстояния, после чего воспроизводит Звук 19 (Птичка) и повторяется через одну секунду. 8. Механизм, использованный в моей модели можно также использовать для создания двух птиц, одна из которых издаёт звук, а другая отвечает ей. Представление модели 1. Моя модель называется «Спасение самолета» 2. В моей модели «оживает» самолёт. Он издаёт различные звуки в зависимости от наклона, при этом ещё меняется скорость вращения лопасти. 3. Моя модель приводится в движение сам человек, наклоняя самолёт в разные стороны. При этом срабатывает датчик наклона и меняется скорость движения лопасти (имитируется крушение самолёта при опускании вниз) 4. Моя модель робота умеет изменять скорость вращения лопасти и менять звук при движении. 5. Для этого я составил (- а) программу из следующих блоков (команд):  Моделью самолёта управляют две программы. Обе они запускаются нажатием на клавиатуре (в английской раскладке) клавиши A. Первая программа ожидает, когда нос самолёта приподнимется, после чего включает мотор при уровне мощности 10. Затем программа повторяется. Вторая программа ожидает, когда нос самолёта опустится, и включает мотор на случайном уровне мощности в диапазоне от 1 до 10. Затем программа ожидает 0,1 секунды и повторяется. Для остановки программ нужно нажать кнопку Стоп Моделью самолёта управляют две программы. Обе они запускаются нажатием на клавиатуре (в английской раскладке) клавиши A. Первая программа ожидает, когда нос самолёта приподнимется, после чего включает мотор при уровне мощности 10. Затем программа повторяется. Вторая программа ожидает, когда нос самолёта опустится, и включает мотор на случайном уровне мощности в диапазоне от 1 до 10. Затем программа ожидает 0,1 секунды и повторяется. Для остановки программ нужно нажать кнопку Стоп6. Я внёс (- ла) изменения: добавлен датчик движения  7. Теперь модель моего робота изменилась и работает так: Программа модифицируется, добавляются различные звуки после каждого Блока «Ждать». Первая программа ожидает, когда самолёт поднимет нос, после чего увеличивает мощность мотора до 10 и воспроизводит Звук 15 (Рёв мотора). Вторая программа ожидает, когда самолёт опустит нос, после чего изменяет мощность мотора в соответствии со случайно выбранным числом в диапазоне от 1 до 10 и воспроизводит Звук 16 (Поломка мотора). Затем обе программы повторяются. 8. Механизм, использованный в моей модели можно также для создания модели движения другого вида транспорта, изменив вид модели и воспроизводимые звуки. Представление модели 1. Моя модель называется «Спасение Великана» 2. В моей модели «оживает» великан. Он поднимается. 3. Моя модель приводится в движение Электроэнергия поступает из компьютера на мотор, вращающий шкив, который посредством ремня приводит в движение другой шкив, червячное колесо и большое зубчатое колесо. Скорость вращения снижается, а сила увеличивается, действуя на рычаг и струну, которые поднимают великана 4. Моя модель робота умеет при нажатии на кнопки «вверх» и «вниз» поднимать или опускать великана. 5. Для этого я составил (- а) программу из следующих блоков (команд):  Команда запускается стрелкой вверх. Механизм вращается против часовой стрелки и великан поднимается. При нажатии кнопки вниз наоборот, опускается. 6. Я внёс (- ла) изменения в программу: 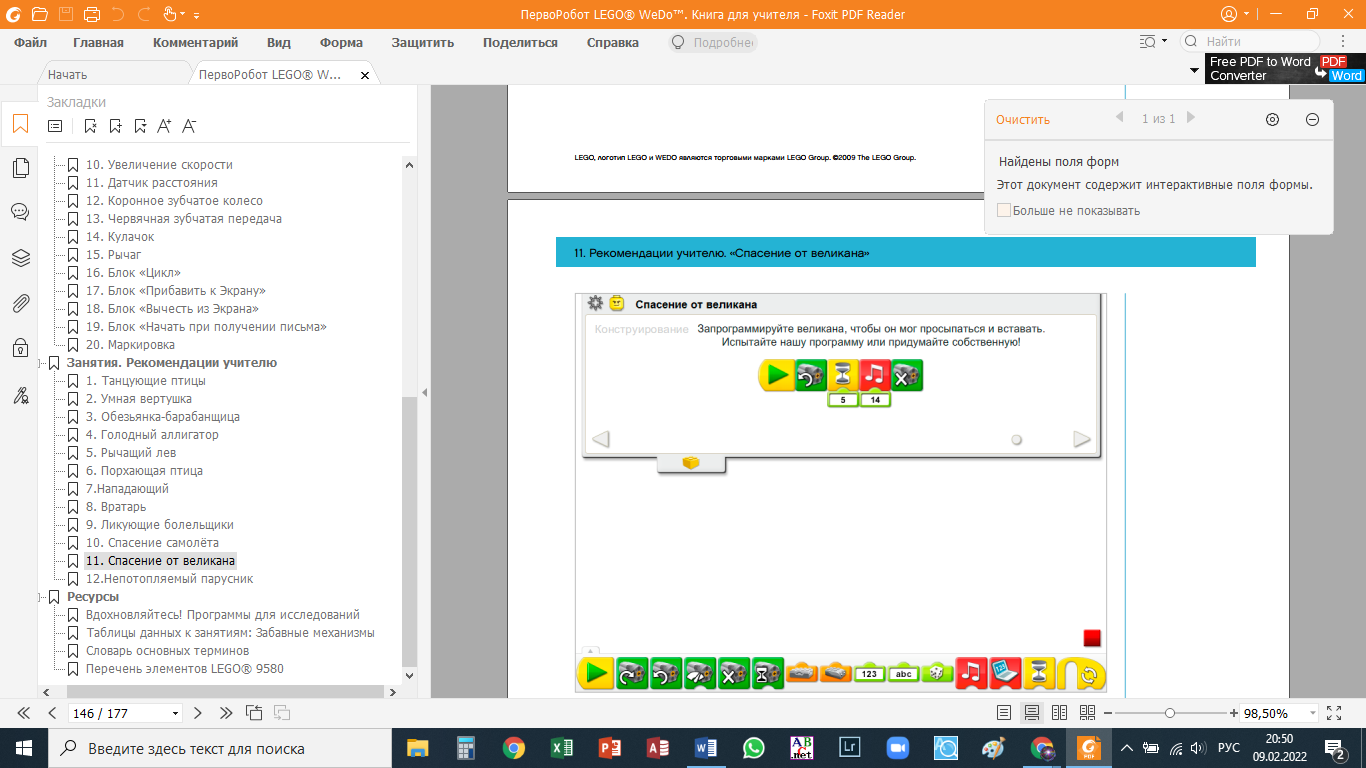 Программа «Спасение от великана» включает мотор против часовой стрелки на 0,5 секунды, воспроизводит Звук 14 (Рычание) и выключает мотор 7. Теперь модель моего робота изменилась и работает так: Великан спасён. Он подымается, издавая звук. 8. Механизм, использованный в моей модели можно также для создания модели подъемного крана. Представление модели 1. Моя модель называется «Непотопляемый парусник» 2. В моей модели «оживает» парусник. Он качается. 3. Моя модель приводится в движение электроэнергия, которая поступает из компьютера на мотор, вращающий маленькое зубчатое колесо, которое вращает большое зубчатое колесо, при этом скорость вращения снижается. К внешней части этого зубчатого колеса прикреплён рычаг, который при вращении зубчатого колеса движется вперед-назад и движет установленную на поворотной оси лодку 4. Моя модель робота умеет раскачиваться из стороны в сторону имитируя движение лодки на волнах. 5. Для этого я составил (- а) программу из следующих блоков (команд): 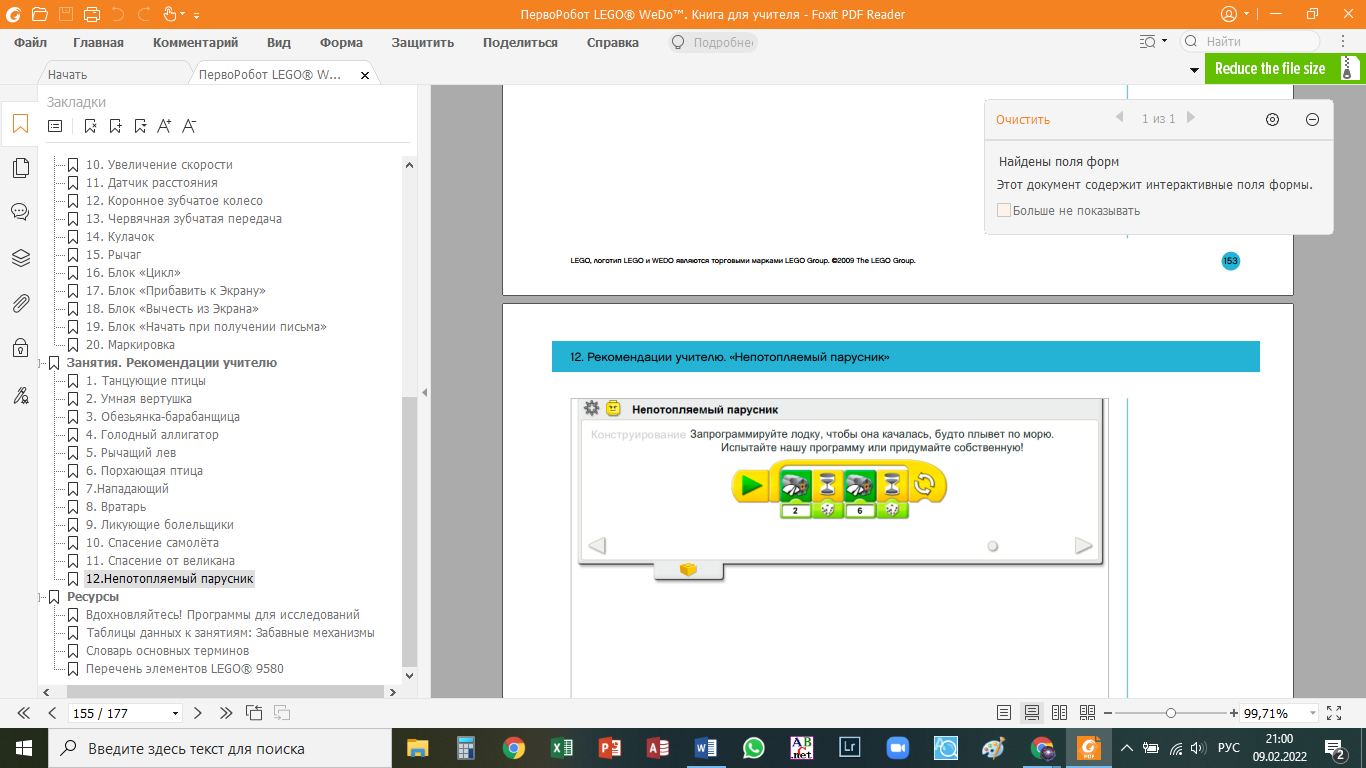 В программе управления лодкой повторяется серия действий, управляющих мотором. Сначала программа включает мотор с мощностью 2. Затем ждет, пока не пройдет случайное время в диапазоне от 0,1 до 1,0 секунды. Затем включает мотор с мощностью 6 и снова ждет случайное время. 6. Я внёс (- ла) изменения в программу: добавлен датчик наклона 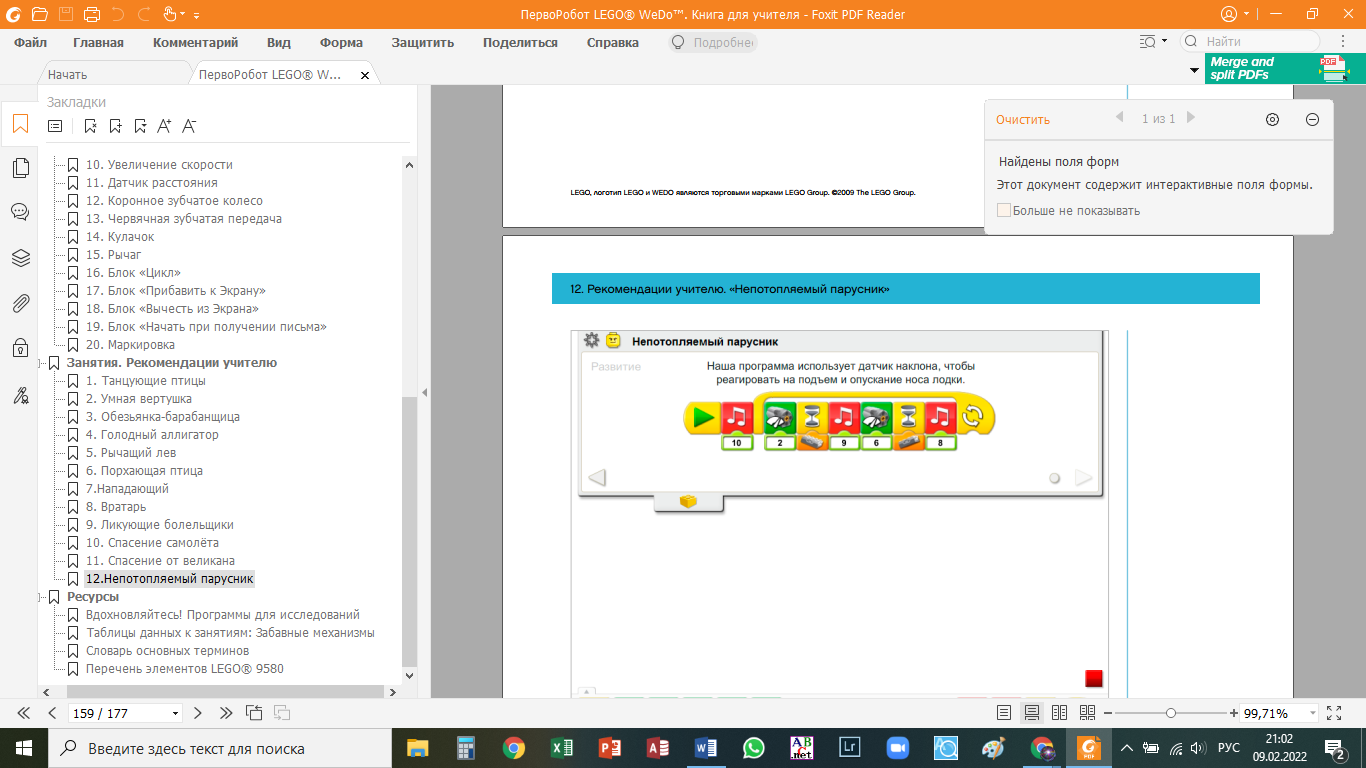 7. Теперь модель моего робота изменилась и работает так: При наклоне меняется звук. Можно подобрать различное звучание, например рёв мотора, скрип или стук. 8. Механизм, использованный в моей модели можно также для имитации движения любого другого транспорта. |