Записка. Расчёт ленточного конвейера
 Скачать 0.78 Mb. Скачать 0.78 Mb.
|

1 2 Федеральное агентство по образованию Томский государственный архитектурно-строительный университет Кафедра: «Строительные и дорожные машины»  Курсовая работа по дисциплине «Машины непрерывного транспорта» Тема: «Расчёт ленточного конвейера» Выполнил: Студент гр. // Проверил: // С  одержание одержаниеРасчётная часть…………………………………………………………………1 1 Определение требуемой ширины ленты……………………….………...…1 2 Выбор типа ленты и её стандартной ширины……………………………...2 3 Определение параметров роликовых опор………………………………....3 4 Определение мощности двигателя привода конвейера……………....5 5 Определение других параметров ленточного конвейера…………………15 6 Выбор принципиальной схемы механизма передачи привода конвейера………………………………………………………………………16 7 Основные типы редукторов в приводе ленточных конвейеров………….17 8 Определение основных параметров дополнительной передачи…………18 9 определение усилия для натяжения конвейерной ленты и хода натяжного устройства конвейера…………………………………………….18 Список используемой литературы…………………………………………...19 З адание на проектированиеПроизводительность конвейера Длина прямолинейного горизонтального участка конвейера Угол наклона конвейера Высота подъёма насыпного груза конвейером Форма рабочей ветви ленты конвейера – желобчатая трехроликовая; Транспортируемый насыпной груз и его объёмная масса – сортированный гравий Максимальная крупность кусков транспортируемого материала Угол обхвата лентой приводного барабана Футеровка приводного барабана – без футеровки; Атмосфера, в которой работает конвейер – влажная; Способ разгрузки насыпного груза с конвейера – разгрузочной тележкой; Необходимо: рассчитать основные параметры ленточного конвейера. Схема конвейера – по рисунку 1. 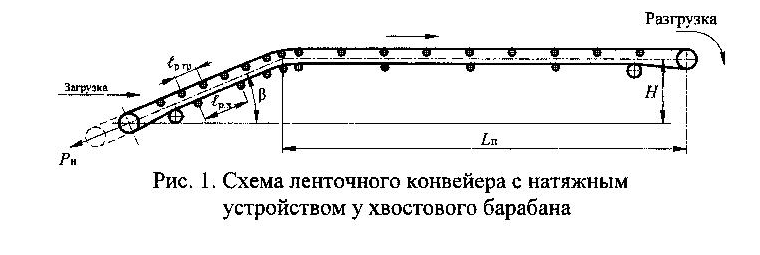 Расчетная часть 1 Определение требуемой для конвейера ширины ленты 1.1 По заданной производительности конвейера:  (1) (1)где Угол наклона конвейера Скорость ленты После подстановки численных значений параметров в выражение (1) получим 1.2 По крупности кусков транспортируемого груза, ширина ленты должна удовлетворять следующим требованиям: для сортированного насыпного груза: где После подстановки численных значений параметров в выражение (2) получим  2 Выбор типа ленты и её стандартной ширины  2.1Выбор типа ленты: Тип ленты выбирается в зависимости от рода и крупности транспортируемого материала. В моём случае максимальная крупность кусков транспортируемого материала равна 80 (мм), выбираем ленту тип 2. Тип 2 – многопрокладочная, с двухсторонней резиновой обкладкой для транспортирования абразивных, малоабразивных и неабразивных средне и мелкокусковых грузов, угля и горной породы (куски размером до 300мм). Лента может быть морозостойкой, теплостойкой, негорючей, маслостойкой, а также пищевая. 2.2 Выбор ленты стандартной ширины Определенная по заданной производительности и крупности кусков транспортируемого груза ширина ленты конвейера является основной для выбора ленты стандартной ширины В порядке исключения, чтобы излишне не завышать размеры ленты, допускается принимать её шириной меньше на 5%. выбираем ширину ленты Количество тяговых тканевых прокладок Номинальная прочность тяговых прокладок на разрыв  3 Определение параметров роликовых опор 3 Определение параметров роликовых опор3.1 Расстояние между роликовыми опорами: 3.1.1 Расстояние между роликовыми опорами на груженой ветви конвейера Принимаем 3.1.2 Находим расстояние между роликовыми опорами на холостой ветви конвейера 3.1.3 Расстояние между роликовыми опорами под загрузочными устройствами 3.2 Расстояние между центрирующими опорами Так как в моём случае длина конвейера не входит в интервал 3.3 Диаметр роликов Для плоских лент нормального исполнения при 3.4 Погонная масса движущихся частей роликовых опор, кг/м На грузовой ветви На порожней (холостой) ветви где  масса вращающихся частей роликоопоры соответственно на грузовой и порожней (холостой) ветвях, кг; масса вращающихся частей роликоопоры соответственно на грузовой и порожней (холостой) ветвях, кг;Масса вращающихся частей каждого ролика принимаем по (1, таблица 5). Принимаем  После подстановки численных значений параметров в выражение (3) получим После подстановки численных значений параметров в выражение (4) получим   . .4 Определение мощности двигателя привода конвейера и сопутствующих ему параметров Существует два способа расчёта мощности двигателя привода ленточного конвейера: упрощенный и уточненный (по контуру или точкам). Упрощенный способ определения мощности двигателя привода и натяжения ленты пригоден, в основном, для прямолинейных конвейеров и небольшой длины, когда угол обхвата лентой приводного (ведущего) барабана, который обеспечивает передачу ленте необходимого тягового усилия, составляет от 180 до 3000. 4.1 Определение мощности электродвигателя привода конвейера упрощенным способом: 4.1.1 Мощность на валу проводного барабана  где Принимаем Определим мощность, расходуемую на перемещение насыпного грунта где  насыпного груза непрерывным потоком с насыпного груза непрерывным потоком с Принимаем После подстановки численных значений параметров в выражение (6) получим Определим мощность, расходуемую на холостой ход ленты где После подстановки численных значений параметров в выражение (7) получим Так как есть разгрузочные устройства, то: После подстановки численных значений параметров в выражение (5) получим 4.1.2 Установочная мощность электродвигателя где После подстановки численных значений параметров в выражение (9) получим 4.1.3 Тяговое усилие на приводном барабане где После подстановки численных значений параметров в выражение (10) получим 4.1.4 Усилие в набегающей ветви ленты, где После подстановки численных значений параметров в выражение (11) получим  4.1.5 Необходимое число прокладок в ленте 4.1.5 Необходимое число прокладок в ленте  где  После подстановки численных значений параметров в выражение (12) получим Окончательно принимаем число прокладок в ленте 4.1.6 Погонная масса ленты где Принимаем Принимаем После подстановки численных значений параметров в выражение (13) получим 4.2 Определение мощности электродвигателя привода конвейера уточненным способом: 4.2,1 Схема контура конвейера с расставленными на нём характерными точками С тем, чтобы иметь возможность определить  стков контура. Причём к характерным точкам контура конвейера относят и точки набегания ленты на приводные барабаны и сбегания с них. стков контура. Причём к характерным точкам контура конвейера относят и точки набегания ленты на приводные барабаны и сбегания с них.Расстановку характерных точек целесообразно начинать с точки сбегания ленты с последнего приводного барабана. И далее, следуя по ходу перемещения ленты, последовательно отмечаем точками места сопряжения прямолинейных участков с криволинейными. 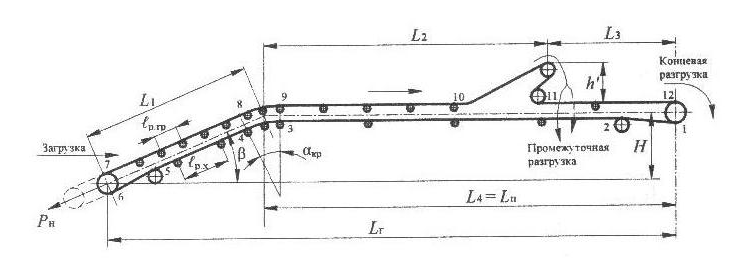 4.2.1 Определение усилий в характерных точках контура конвейера Обозначим усилия в характерных точках контура конвейера, начиная с первой, соответственно через Причем Определение усилий в характерных точках контура начинаем с точки 1, усилие в которой Обходя последовательно весь контур конвейера от точки к точки, выражаем усилия ленты в этих точках через неизвестное При этом следует помнить, что в соответствии с сущностью метода обхода контура конвейера по точкам усилие в каждой последующей точке контура  равно усилию в предыдущей плюс сила сопротивления на участке между этими точками. Причем сила сопротивления между точками на криволинейном участке ( барабаны, отклоняющие ролики, батарея роликов и пр.) в практических расчётах обычно учитывается поправочным коэффициентом «К», значение которого принимается в зависимости от угла обхвата лентой этого криволинейного участка: при угле обхвата 1800 и более К=от 1,05 до 1,06; то же при 900 К=от 1,03 до 1,04; то же при менее 900 К=от 1,02 до 1,03. равно усилию в предыдущей плюс сила сопротивления на участке между этими точками. Причем сила сопротивления между точками на криволинейном участке ( барабаны, отклоняющие ролики, батарея роликов и пр.) в практических расчётах обычно учитывается поправочным коэффициентом «К», значение которого принимается в зависимости от угла обхвата лентой этого криволинейного участка: при угле обхвата 1800 и более К=от 1,05 до 1,06; то же при 900 К=от 1,03 до 1,04; то же при менее 900 К=от 1,02 до 1,03.При движении ленты по батарее роликоопор где Определим погонную массу транспортируемого груза После подстановки численных значений параметров в выражение (13) получим Результаты расчётов для контура конвейера, изображенного на рисунке 2 в общем виде сводим в таблицу 1. Из таблицы 1 (графа 3) легко заметить, что усилие ленты в точке набегания на приводной барабан приводится к виду или где С другой стороны, усилия где  Из приведенного выше уравнения (19), считая неравенство (20) равенством, можно определить Из приведенного выше уравнения (19), считая неравенство (20) равенством, можно определить
 Теперь зная Теперь зная Однако в расчётах следует также удовлетворить еще одно условие, а именно, условие нормального провеса ленты между роликоопорами на груженой ветви конвейера. В соответствии с этим условием, наименьшее из допустимых усилий ленты в точке на груженой ветви После подстановки численных значений параметров в выражение (21) получим  Принимаем 4.2.2 Общее выражение для определения мощности двигателя привода конвейера Установочная мощность двигателя привода конвейера где где Значения После подстановки численных значений параметров в выражение (16) получим  После подстановки численных значений параметров в выражение (15) получим После подстановки численных значений параметров в выражение (14) получим 4.2.4 Выбор двигателя привода конвейера По таблице 9 выбираем окончательно двигатель. Типоразмер двигателя – 40П2-92-4У3, со следующими характеристиками: Мощность – 55 кВт; Синхронная частота вращения – 1500 об/мин; Частота вращения – 1475 об/мин; Отношение вращающего момента к номинальному максимального – 2,2 начального пускового – 2,4 минимального – 1,5. 4.3 Проверка числа прокладок в ленте Проверку числа прокладок делаем по формуле (12) где Перерасчёт не требуется  1 2 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||