Технические измерения и приборы. Вопрос Преобразователи механических величин и системы дистанционной передачи
 Скачать 4.5 Mb. Скачать 4.5 Mb.
|

Вопрос № 1.1.Преобразователи механических величин и системы дистанционной передачи.К механическим параметрам (величинам) относят: линейные и угловые перемещения; механические усилия, деформации, напряжения, моменты и т.д. Реостатные преобразователи.Предназначены для преобразования линейных и угловых перемещений в омическое сопротивление. Достоинства: высокая точность – до 0,05% и высокая мощность. Реостатный преобразователь – каркас, на который намотана проволока из манганина или константана (из металла с низким температурным коэффициентом сопротивления). При высоких температурах используется нихром или сплав палладия с вольфрамом. Отличия от обычного реостата: очень тщательная линейная намотка с равномерным шагом; материал намотки должен обладать низким температурным коэффициентом сопротивления (ТКС); температурные коэффициенты линейного расширения каркаса и проводника должны быть одинаковы. х  – перемещение, l – длина реостатного датчика, – перемещение, l – длина реостатного датчика, ro- шаг намотки, сопротивление на единицу длины. Статическая характеристика ступенчатая:  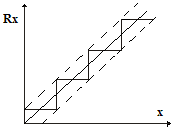 аддитивная погрешность дискретности 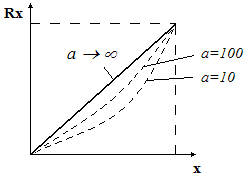 Для a характеристика линейная. Для получения линейной статической характеристики реостатные преобразователи включают в цепи следящего астатического уравновешивания. 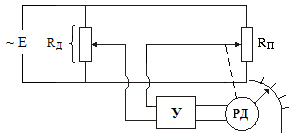 RП – реостат приемник RД – датчик На РД будет ноль, когда движки на сопротивлениях будут находиться в одинаковом положении. Тензометрические преобразователи.Предназначены для измерения упругих деформаций и механических напряжений в узлах и деталях машин при статических и динамических нагрузках. Принцип действия основан на использовании тензоэффекта, т.е. на изменении сопротивления проводника при его деформации. где ρ– удельное сопротивление; l– длина; S – площадь поперечного сечения. Возьмем полный дифференциал выражения (1): Разделим левую и правую части этого равенства на (1) и перейдем к конечным приращениям: Обозначим Тогда Обозначим Материал тензодатчика должен обладать высоким удельным сопротивлением и низким температурным коэффициентом сопротивления. Для изготовления используется константан (до 300ºС), сплавы никеля и молибдена (до 500ºС), нихром (до 700ºС), сплавы на основе платины (до 1000ºС). Тензодатчики бывают двух типов: проволочные и фольговые. Проволочный тензодатчик: 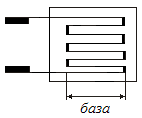 база = 1,5 ÷ 100 мм Ø проволоки = 0,01 ÷ 0,05 мм Недостаток – наличие поперечной тензочувствительности (0,2 ÷ 0,1% от продольной тензочувствительности). Фольговые тензодатчики изготавливаются травлением или электростатическим напылением. Достоинство – отсутствие поперечной тензочувствительности, хороший тепловой контакт с деформируемой деталью. Размеры: толщина = 5 ÷15 мкм; база 0,1 ÷ 0,5 мм Тензодатчики включают в качестве плеч неравновесных мостов. Чтобы исключить температурную погрешность измерения включают два тензодатчика. 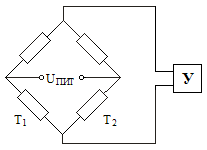 Т1 наклеивают на деформируемую деталь, а Т2 – на Т1 наклеивают на деформируемую деталь, а Т2 – на недеформируемую, но имеющую ту же температуру. Выходной сигнал моста подают на усилитель, т.к. Uпит не может быть большим. У – усиливает выходной сигнал. Усилитель многоканальный (до 24 каналов) (для одновременного контроля нескольких деталей). Индуктивные преобразователи.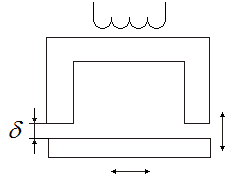 Предназначены для преобразования линейных и угловых перемещений в индуктивное сопротивление. В простейшем случае индуктивный преобразователь состоит из магнитопровода и подвижного элемента, который связан с перемещаемым узлом. Может работать и в режиме переменной толщины зазора и в режиме переменной площади зазора. Т.к. Тогда магнитное сопротивление 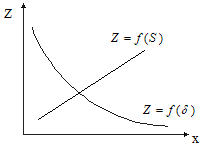 Характеристика линейна по отношению к пропорциональна x – перемещение (либо Z = f ( Z = f ( Поэтому на производстве в основном используют датчики в режиме переменной толщины воздушного зазора. Недостаток – обратное воздействие на чувствительный элемент со стороны якоря (он притягивается). Для устранения этого недостатка используют дифференциальные индуктивные преобразователи. У них чувствительность в 2 раза больше. В   режиме переменной толщины. В режиме переменной площади. Роторный индуктивный преобразователь (индуктивный круговой дискретный).Предназначен для преобразования угловых перемещений в переменный сигнал индуктивности.  Магнитная цепь состоит из двух концентричных зубчатых сердечников, сдвинутых между собой на 1/2 шага зубьев. При повороте ротора изменяется взаимное расположение зубьев, а следовательно и полное сопротивление катушек индуктивности. Это сопротивление изменяется периодически, с периодом Т = Получаем импульсы: когда зубья совпадают – индуктивность максимальна; когда зуб попадает на впадину – индуктивность минимальна. Высокая точность такого преобразователя обеспечивается тем, что точность изготовления отдельных зубьев не влияет на точность работы, т.к. используются только суммарные величины. Сдвиг зубьев на 1/2 шага позволяет определить направление угла поворота ротора. Аналогичный преобразователь может быть выполнен в виде линейки. 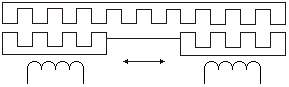 Чаще ползуны закреплены, а линейка движется; редко, наоборот. Вращающиеся (поворотные) трансформаторы.Предназначены для преобразования угловых перемещений в напряжение переменного тока. Эти преобразователи имеют электромашинное исполнение, с обмотками на статоре и роторе. Выходной сигнал зависит от взаимного расположения обмоток.  U2 – выходной сигнал, U1 – напряжение источника, W – число витков обмотки, Недостаток: при нагрузке вторичной обмотки, ее магнитный поток оказывает обратное размагничивающее действие на первичную обмотку. Для устранения этого явления на статоре и роторе размещают по две обмотки, сдвинутые между собой на 90º. 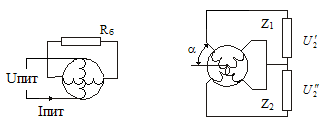 статор ротор Балластное сопротивление Rб и сопротивления нагрузки Z1 и Z2 подбирают так, чтобы во вторичных обмотках сила тока не менялась при повороте ротора. Рассмотренные преобразователи относят к преобразователям накапливающего типа (преобразователи отрезков шкал) Вопрос № 1.2. Оптический преобразователь, работающий с датчиками накапливающего типа.Имеется диск с двумя дорожками, на которых есть светлые и темные участки. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
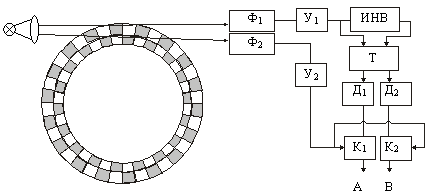
 Ф1 и Ф2 –фотоприемники;
Ф1 и Ф2 –фотоприемники; | Дес. | Дв. Код | Код Грея |
| 0 | 0000 | 0 |
| 1 | 0001 | 0001 |
| 2 | 0010 | 0011 |
| 3 | 0011 | 0010 |
| 4 | 0100 | 0110 |
| 5 | 0101 | 0111 |
| | | | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| | | | | | ||||||||||||||||
| | | | | | | | | | ||||||||||||
| | | | | | | | | | | | | | | | | | ||||
| | | | ||||||||||||||||||
| | | | ||||||||||||||||||
| | | | ||||||||||||||||||
| | | | ||||||||||||||||||
| | | ||||||||||||||
| | | | | ||||||||||||
| | | | | | | | | ||||||||
| | | | | | | | | | | | | | | | |
маска двоичного кода маска циклического кода
Обратный переход от кода Грея к двоичному осуществляется по правилам:
Все цифры в старших разрядах до первой 1 - в двоичном коде такие же, как и в коде Грея.
В остальных разрядах цифры совпадают, если перед данным разрядом (со стороны старших) было четное число единиц.
Если число единиц в коде Грея было нечетным, то данная цифра в двоичном коде заменяется на обратную.
Пример:
1100101 - код Грея
1000110 - двоичный код
С
хема преобразователя:
диск
Д – диафрагма; Ф – фотоприемник; П – преобразователь; ДШ – дешифратор; ЦОУ – цифровое
отсчетное устройство. На вращающемся диске нанесен код Грея.
Рассмотрим работу преобразователя П:
2 – для получения инверсного сигнала;
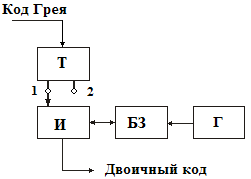
Г – импульсный генератор;
БЗ – блок задержки;
На триггер Т со счетным входом подаются импульсы
кода Грея, начиная со старшего разряда. С выхода 1
триггера импульсы подаются на первый вход
логического элемента И. На второй вход И через БЗ
синхронно с импульсами кода Грея подаются
импульсы от тактового генератора Г. БЗ задерживает
импульсы Г, чтобы триггер успел переброситься из одного устойчивого состояния в другое.
Пример:
1100 = 8 в коде Грея
1000 = 8 в двоичном коде.
Вопрос № 1.3.
Дифференциально-трансформаторные преобразователи перемещений.
Предназначены для преобразования линейных перемещений в диапазоне от –5 до +5мм в нормализованный выходной сигнал в виде взаимоиндуктивности от –10 до +10мГн.
Н
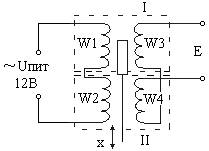 а двух катушках (I и II) намотаны обмотки возбуждения W1 и W2 и вторичные обмотки W3 и W4. W1 и W2 соединены последовательно(синфазно). W3 и W4 – встречно(противофазно). Магнитный поток, возникающий при протекании тока по первичной обмотке, создает взаимоиндуктивность М в обмотках W3 и W4. А т.к. они включены встречно, то общая взаимоиндуктивность:
а двух катушках (I и II) намотаны обмотки возбуждения W1 и W2 и вторичные обмотки W3 и W4. W1 и W2 соединены последовательно(синфазно). W3 и W4 – встречно(противофазно). Магнитный поток, возникающий при протекании тока по первичной обмотке, создает взаимоиндуктивность М в обмотках W3 и W4. А т.к. они включены встречно, то общая взаимоиндуктивность: Величина взаимоиндуктивности зависит от расстояния между катушками I и II и положения плунжера внутри катушек, который связан с чувствительными элементами датчика, который преобразует перемещения. Плунжер выполнен из магнитомягкого железа.
Если плунжер находится в среднем положении, то результирующая взаимоиндукция будет рана нулю. Если его поднять, то М3 увеличится, а М4 уменьшится, и наоборот при опускании. Возникает разностный сигнал:
Линейная статическая характеристика. Угол ее наклона (чувствительность) можно изменять, меняя расстояние между катушками.
Класс точности 0,5.
Ф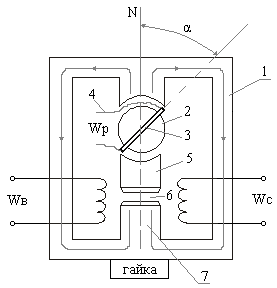 ерродинамические преобразователи.
ерродинамические преобразователи.
Предназначены для преобразования угловых перемещений в нормализованный сигнал в виде взаимноиндуктивности от –10 до +10мГн.
1 – магнитопровод
2 – сердечник.
3 – рамка
4 – вывод с рамки
5 – неподвижный плунжер
6 – зазор
7 – подвижный плунжер (с помощью него меняют
чувствительность)
N – магнитная нейтраль
Wв – обмотка возбуждения;
Wс – обмотка смещения; Wр – рамка.
В зазоре между полюсным наконечником может поворачиваться рамка, которая связана с чувствительным элементом. В одной части намотана обмотка возбуждения WВ, а также обмотка смещения WC.
Магнитный поток, возникающий при протекании тока по обмотке WВ создает взаимоиндуктивность в обмотке WР. Взаимоиндуктивность в рамке будет зависеть от угла поворота относительно магнитной нейтрали N.
Обмотка смещения (Wс) может включаться последовательно с обмоткой рамки (WР) синфазно или противофазно.
Общая взаимоиндуктивность:
Рамка связана с чувствительным элементом. Будем поворачивать рамку и получим ЭДС на выходе:
Статическая характеристика k = 1 – Wс в фазе
 k = 0 – Wс не подключена
k = 0 – Wс не подключенаk = -1 – Wс в противофазе
Класс точности 0,5.
Преобразователи типов ПФ и ПД включают в цепи следящего астатического уравновешивания.
П
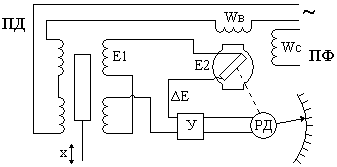 ри перемещении плунжера возникает сигнал Е1 и если он не равен Е2, на вход усилителя поступает сигнал ∆Е = Е1 – Е2
ри перемещении плунжера возникает сигнал Е1 и если он не равен Е2, на вход усилителя поступает сигнал ∆Е = Е1 – Е2 и РД перемещает рамку до того момента, пока ∆Е не станет = 0.
Одновременно перемещается стрелка.
Электросиловой нормирующий преобразователь.
Предназначен для преобразования усилия в нормализованный сигнал постоянного тока. Сигнал может передаваться на большие расстояния. Преобразователь работает по схеме следящего астатического уравновешивания.
Дистанционность до 10км. КН – корректор нуля.
Нагрузка до 2,5КОм. ПН –преобразователь неравновесия.
Класс точности 0,5. ОП – обратный преобразователь.
Пневмосиловой нормирующий преобразователь.
Преобразователь перемещений и механического усилия в нормализованный пневматический сигнал 20 – 100КПа.
О
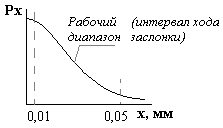
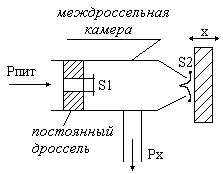 сновным элементом является устройство типа «сопло-заслонка».
сновным элементом является устройство типа «сопло-заслонка».Воздух переходит через отверстие между соплом и заслонкой при подаче в сопло Рпит. Сопло и заслонка образуют переменный дроссель. Рпит – давление питания (140 кПа от редуктора). Давление междроссельной камере определяется расстоянием между соплом и заслонкой. Постоянный дроссель создаёт делитель давления, иначе в междроссельной камере было бы Рпит.
Рx – давление на пневмоусилитель.
Уравнение расхода:
ρ– плотности воздуха до и после постоянного дросселя; α – коэффициенты расхода;
S – площади отверстий постоянного и переменного дросселя;
х – расстояние между заслонкой и соплом.
Будем считать, что в первом приближении
 ;
;
Преобразователь работает по принципу следящего статического уравновешивания.
Нужно создать местное сопротивление, чтобы получилось РХ (делитель давления)
Под действием усилия F заслонка приближается к соплу. При этом возрастает давление в междроссельной камере. Это давление подается на вход пневмоусилителя, а Рвых усиливается и подается в сильфон обратной связи и поднимает заслонку. Но не до начального положения. Существует остаточное неравновесие, из которого формируется выходной сигнал. Из сильфона ОС выходит выходной сигнал. Чтобы увеличить преобразуемое усилие в 2 раза (поменять чувствительность) надо передвинуть ромбик вправо.
Нечувствителен к перемещениям, воспринимает только усилия.
Сигнал передается на расстояние до 300м.
Работает по принципу компенсации усилий.