Вопросы к экзамену Компьютерное молелирование определение, классификация, практическое применение
 Скачать 207.89 Kb. Скачать 207.89 Kb.
|

|
Билет содержит 1 теоретический вопрос и 1 задачу. Вопросы к экзамену Компьютерное молелирование: определение, классификация, практическое применение. Компьютерное моделирование — это процесс математического моделирования, выполняемый на компьютере, который предназначен для прогнозирования поведения или результатов реальной или физической системы. Компьютерные модели можно классифицировать по нескольким независимым парам признаков, в том числе: Стационарное или динамическое Непрерывное или дискретное Динамическое моделирование систем, например, электрических систем, гидравлических систем или механических систем с несколькими телами или динамическое моделирование полевых задач Локальное или распределенное. Компьютерное моделирование применяют для широкого круга задач, таких как: анализ распространения загрязняющих веществ в атмосфере; проектирование шумовых барьеров для борьбы с шумовым загрязнением; конструирование транспортных средств; симуляция полёта на авиационном тренажёре для тренировки лётчиков; прогнозирование погоды; эмуляция работы других электронных устройств; прогнозирование цен на финансовых рынках; исследование поведения зданий, конструкций и деталей под механической нагрузкой; прогнозирование прочности конструкций и механизмов их разрушения и т.д. Задачи компьютерного молелирования. Понятия структурной оптимизации и параметрическая оптимизация. Создание моделей объектов и систем для дальнейшей их практической реализации или подготовки производства изделий в промышленности. Анализ свойств объектов и систем на основе исследования их модели, которые используются для выявления значения параметров проектируемых объектов систем и поддержки процессов принятия инженерных решений. Структурная оптимизация - это определение оптимальной структуры автоматической системы Параметрическая оптимизация определение оптимальных значений параметров элементов автоматической системы заданной структуры Этапы компьютерного моделирования. 1. Постановка задачи и её анализ 2. Построение информационной модели 3. Разработка метода и алгоритма реализации компьютерной модели 4. Разработка компьютерной модели 5. Проведение эксперимента В процессе проведения эксперимента может выясниться, что нужно: скорректировать план исследования; выбрать другой метод решения задачи; усовершенствовать алгоритм получения результатов; уточнить информационную модель; внести изменения в постановку задачи. В таком случае происходит возвращение к соответствующему этапу и процесс начинается снова. Преимущества, недостатки и проблемы молелирования. Преимущества компьютерного моделирования: Свободно и доступно в использовании. Можно рассчитывать и создавать такие объекты, которые в реальных условиях невозможны. С помощью компьютерного моделирования возможно не только наблюдать, но и предсказывать результаты экспериментов. Находить оптимальную форму и конструкцию не создавая пробных деталей. Эксперименты без риска для здоровья человека и не представляет опасности для природы. Возможность обзора объекта со всех сторон. Недостатки компьютерного моделирования: Заблуждение о том, что моделирование может качественно обнаруживать новые явления. Т.к. должно быть подтверждение в реальных условиях и в реальных экспериментах. Модельный анализ уменьшает возможные объяснения. Из объекта моделирования можно «выжать» только то, что входит в рамки модели. Основные положения метода конечных элементов 1) любую непрерывную величину (например, температуру, давление, перемещение) можно аппроксимировать дискретной моделью, которая строится на множестве кусочно-непрерывных функций, определённых на конечном числе подобластей (элементов); 2) кусочно-непрерывные функции определяются с помощью значений непрерывной величины в конечном числе точек рассматриваемой области. Этапы конечно-элементного анализа Метод конечных элементов состоит из 4 этапов: 1. Выделение конечных элементов (разбиение области на конечные элементы); 2. Определение аппроксимирующей функции для каждого элемента. 3. Объединение конечных элементов в ансамбль. 4. Решение полученной системы алгебраических уравнений. Для решения систем уравнений применяются методы двух групп: прямые методы (метод Гаусса), косвенные методы, когда решение определяется на основе последовательной аппроксимации (метод Гаусса-Зейделя). Процессно-ориентированный подход имитационного моделирования Функционирование системы описывается как развивающееся во времени действие, с учетом взаимодействия параллельно протекающих процессов (processes). Процесс представляет собой цепочку событий, выполнение которых приводит к определенному в алгоритме изменению состояния системы. Событийно-ориентированный подход имитационного моделирования Событием называется изменение состояния системы, которое происходит мгновенно. В промежутке между двумя событиями модель остаётся неизменной. Процесс функционирования системы представляется как последовательность событий, а управление процессом моделирования заключается в выборе и активизации программы, имитирующей соответствующее событие. Продвижение модели из одного состояния в другое выполняется по определённому алгоритму, который содержит сценарий поведения модели во времени и задает причинно-следственные связи между активизацией событий. Пакет MATLAB Simulink - как основа визуализации моделирования. Определение Simulink Library Browser. Построение блок-схем Пакет Simulink может использоваться для расчетов, функционального и имитационного моделирования различных систем. Это комплекс библиотек блоков, необходимых для создания функциональных моделей систем управления и связи, цифровых, электротехнических и энергетических устройств и т.д Для создания какого-либо процесса моделирования из библиотеки блоков выбираются необходимые модули путем «перетаскивания» в рабочее поле моделирования или с помощью команды Add to, далее задаются параметры каждого блока и соединяются линиями связи. Блоки Matlab Simulink: Sine Wave, Pulse Generator, Signal Generator, их предназначение, настройки. Настройки: Sine Wave - формирует синусоидальный сигнал с заданной частотой, амплитудой, фазой и смещением.: - Sine type; - Time; - Amplitude; - Bias; - Frequency; - Phase; Signal Generator – формирует один из четырех видов периодических сигналов: - Wave form - - Time; - Amplitude; - Frequency; Pulse Generator – генерирует последовательность прямоугольных импульсов: - Pulse type; - Amplitude; - Period; - Pulse Width; - Phase delay. Блоки Matlab Simulink: PowerGui, Fourier, Series RLC Branch, AC Voltage Source их предназначение, настройки. Для чего предназначено командное окно Command Window? PowerGui - позволяет задать начальные значения переменных модели, выполнить расчет установившегося режима, осуществить инициализацию схемы, содержащей электрические машины, найти полное сопротивление (импеданс) цепи и т.д. Fourier - выполняет анализ Фурье входного сигнала по рабочему окну одного цикла основной частоты сигнала. Значение частоты колебаний в герцах (Fundamental frequency (Hz)) и номер гармоники (Harmonic n (0=DC, 1=fundamental):), Initial input, Sample time. Series RLC Branch - реализует один резистор, индуктор, или конденсатор или серийную комбинацию их. Значения сопротивления, индуктивности и емкости блока Series RLC Branch могут принимать нулевые и бесконечно большие, значения. AC Voltage Source – источник синусоидального напряжения (настройки-амплитуда, фаза, частота, шаг) Для чего предназначено командное окно Command Window? Это окно предназначено для ввода чисел, переменных, выражений и команд. Здесь же выводятся результаты работы и сообщения об ошибках. О готовности системы к вводу свидетельствует знак >>, который располагается в текстовом поле командного окна (в командной строке). Для выполнения введенной команды следует нажать клавишу , Клавиши управления ↑ и ↓ в ML имеют совсем другое назначение, чем в текстовых редакторах. Использование этих клавиш позволяет отобразить в командной строке ранее введенные с клавиатуры команды и выражения для их повторного использования. Это возможно потому, что все выполненные команды сохраняются в специальной области памяти. Чтобы стереть содержимое командного окна, достаточно набрать и выполнить команду clc. Блоки Matlab Simulink: Derivative, Gain, Mux, Sum, Transfer Fcn, их предназначение, настройки. Derivative выполняет численное дифференцирование входного сигнала; Gain выполняет умножение входного сигнала на постоянный коэффициент (коэффициента усиления); -Sum выполняет вычисление суммы текущих значений сигналов (сверху, слева и снизу которого расположены суммирующие входы, а справа выход. Другие настройки блока Sum можно задать в окне его свойств. Параметр List of signs (лист сигналов) определяет количество входов сумматора (в зависимости от количества символов) и их действие.); - Блок Mux предназначен для объединения входных сигналов в вектор. -Transfer Fcn - передаточная функция (Коэффициенты числителя и знаменателя ) PID Controller. Предназначение. Значимость величин коэффициентов, настройки. Для чего нужна обратная связь? Блоки Matlab Simulink: Transfer Fcn, Step, Sum, Scope, их предназначение, настройки. Функция обратной связи Matlab используется для получения передаточной функции замкнутого контура системы -Sum выполняет вычисление суммы текущих значений сигналов (сверху, слева и снизу которого расположены суммирующие входы, а справа выход. Другие настройки блока Sum можно задать в окне его свойств. Параметр List of signs (лист сигналов) определяет количество входов сумматора (в зависимости от количества символов) и их действие.); -Transfer Fcn - передаточная функция (Коэффициенты числителя и знаменателя ) - Step - обеспечивает шаг между двумя определимыми уровнями в требуемое время (Step time, Final value) Scope – выводит в графическое окно график зависимости от времени подаваемой на его вход величины; PID Controller - Пропорционально-интегро-дифференцирующий (ПИД) регулятор формирует сигнал, являющийся суммой трех слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе – интеграл сигнала рассогласования, третье – производная сигнала рассогласования. Чем отличаются Р-модели из раздела SimPowerSystems от S-моделей Simulink и как осуществляется связь между ними? Р-модели имитируют процессы в электрических цепях и позволяют выполнять моделирование на принципиальном уровне. Они отличаются от S-моделей, в которых входные и выходные величины не имеют физического содержания, а линии соединения переносят некоторый информационный сигнал. С помощью S-блоков создаются модели на функциональном уровне. Для связи Р-блоков с S-блоками используются лишь отдельные блоки библиотеки SimPowerSystems, такие как амперметры Current Measurement, вольтметры Voltage Measurement и др. Задача (в каждом билете разные условия) PID регулятор. Начальные условия блока орган управления: step time 150 с.; initial value 10; final value 2; блока внешнее воздействие : step time 300 с.; initial value 0; final value 4; постройте приблизительные графики поворота и управления. Время моделирования 450с. PID 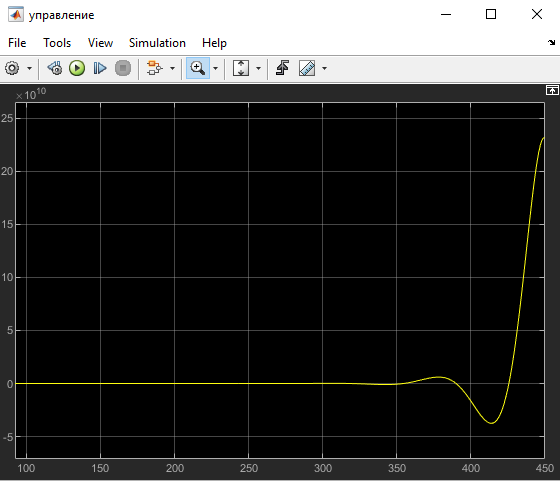 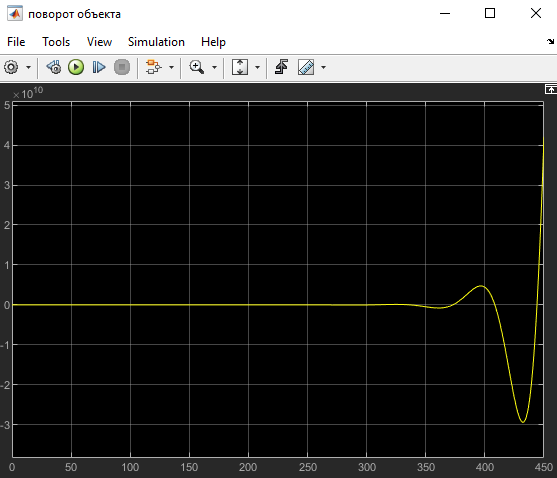 PI 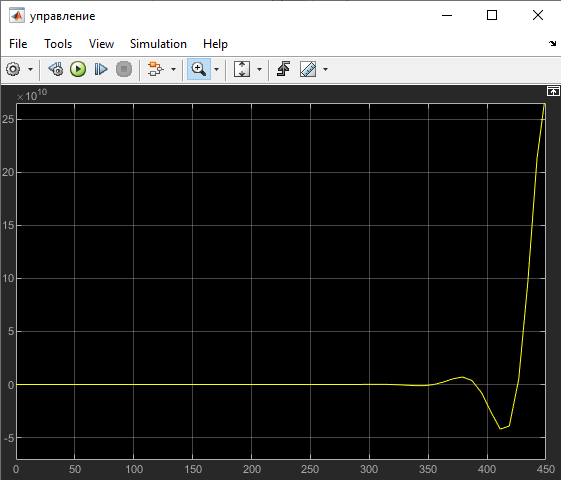 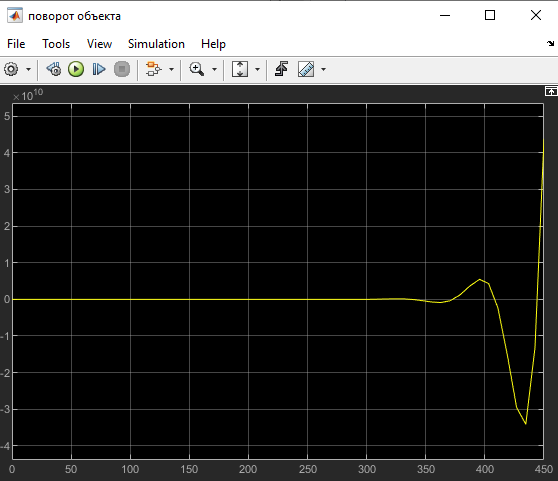 PD   P   I 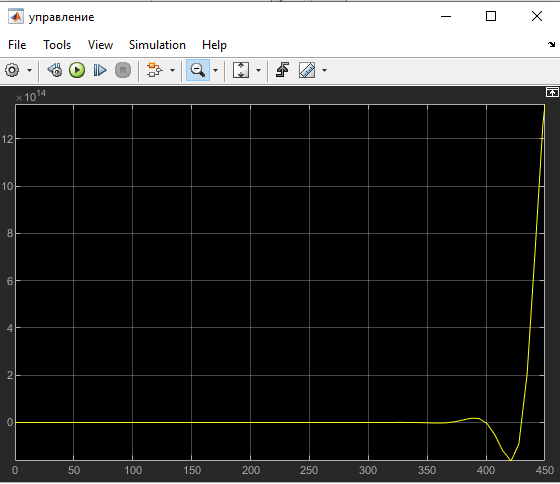  |