1 Аннотация дисциплины
 Скачать 0.5 Mb. Скачать 0.5 Mb.
|

|
1 Аннотация дисциплины Целью изучения дисциплины является расширение мировоззрения студентов и приобретение комплекса специальных знаний, и умений, необходимых для организации высокоэффективных автоматизированных производственных процессов. Учебная дисциплина «Автоматизация производственных процессов в машиностроении» базируется на знаниях общетеоретических и специальных дисциплин, таких как «Резание материалов», «Технология машиностроения», «Металлорежущие станки», «Электротехника». Основные положения дисциплины используются при изучении следующих дисциплин: «Проектирование машиностроительных производств», «САПР технологических процессов», а также в курсовом проектировании и при выполнении выпускной квалификационной работы. 2 Содержание учебной дисциплины «Автоматизация производственных процессов в машиностроении» Таблица 2.1
Продолжение таблицы 2.1
3 Лабораторные и практические занятия 3.1 Лабораторные работы Таблица 3.1
3.2 Практические занятия Таблица 3.2
4 Самостоятельная работа студентов В течение девятого семестра студенты выполняют контрольную работу, целью которой является закрепление студентами знаний, полученных в результате изучения теоретического материала по расчету загрузочных и лотковых транспортных устройств и определению условий сопряжения деталей при сборке. Работа выполняется в соответствие с методическими указаниями по самостоятельной работе. 4.1 Цель работы Целью контрольной работы является закрепление знаний, полученных в результате изучения теоретического материала, приобретение практических навыков расчета загрузочных и лотковых транспортных устройств и определению условий сопряжения деталей при сборке. Варианты заданий контрольной работы (100 вариантов заданий) выбираются по таблице 4.1 по двум последним цифрам зачетной книжки. 4.2 Содержание заданий 1 Расчет загрузочных устройств Задание 1А. [4, С. 22 – 30; 10, С. 41 – 44]. Дисковый карманчиковый бункер. Определить предельную окружную скорость диска при расположении заготовок: а) по хорде, б) перпендикулярно торцу диска, в) радиальном (при медленном и быстром вращении диска). Размеры поперечного сечения лотка – 1,1l х 1,1d, угол наклона α = 45°, коэффициент трения скольжения f = 0,45, коэффициент трения качения К = 0,005 cм, зазор между диском и днищем бункера S = 5 мм.
Задание 1Б. [4, С. 31 – 32; 10, С. 46 – 51]. Бункеры с возвратно-поступательным движением ползуна. Определить производительность Q бункера с внешним лотком, время Тцикла и время остановки (выдачи) tвыдачи, если известна доля времени движения (на подъем и опускание). Угол наклона лотка α =30°, коэффициент трения f = 0,2. Движение деталей вдоль оси. Коэф. заполнения К = 0,8. При тех же данных найти производительность ножевого бункера с внутренним лотком.
Задание 1В. [4, С. 35 – 37; 10, С. 48 – 51]. Бункер с выдачей заготовок порциями из канавок диска с приводом от мальтийского механизма. Определить число оборотов диска nд и производительность бункера Q. Угол наклона канавки диска в зоне скатывания заготовки α =30°, коэффициент трения f =0,3; Z – число пазов. Коэффициент заполнения К = 0,7.
Задание 1Г. [4, С. 38 – 48; 10, С. 53 – 57]. Бункер с центральной вращающейся трубкой и бункер с возвратно-поступательно движущимися полувтулками. Выбрать оптимальный угол конусности приемной части вращающейся трубки. Определить диаметр отверстия во вращающейся трубке и в полуцилиндрических вкладышах, которым сообщается возвратно-поступательное движение. Коэффициент трения f = 0,2. Определить производительность бункеров.
Задание 1Д. [4, С. 50 – 57; 10, С. 60 – 78]. Вибрационный лоток, приводимый в действие электромагнитным вибратором под углом направления вибраций β. Угол наклона лотка α. Коэффициент трения детали по лотку f = 0,2. Рассчитать два значения критических ускорений Sкрит (вверх) и Sкрит (отрыва).
2 Расчет лотковых транспортных устройств Задание 2А. [4, С. 76 – 79; 10, С. 121 – 132]. О 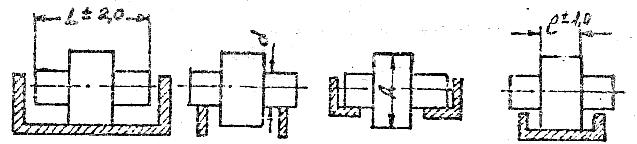 пределить условие проходимости деталей при скатывании ступенчатых деталей с цапфами в открытом лотке, определить оптимальную ширину В лотка. Минимальный зазор между деталью и стенкой лотка найти по длине детали, как зазор по посадке Н11/b11. Коэффициент трения скольжения f = 0,2. Рисунок 2А
Задание 2Б. [4, С. 85 – 87; 10, С. 127 – 132]. Двухрельсовый наклонный лоток. При скольжении деталей типа болт определить минимальный угол наклона γ, при котором обеспечивается условие К = 1,1∆. Определить толщину рельсов лотка h.
Задание 2В. [4, С. 82 – 84; 10, С. 127 – 132]. Угловой наклонный лоток. Угол профиля 2β. Угол наклона лотка α. Определить ускорение W, приобретенное заготовкой при скольжении по наклонному лотку и конечную скорость Vкон при высоте скольжения H. Коэффициент трения на плоскости f = 0,3.
Задание 2Г. [4, С. 79 – 81; 10, С. 125 – 127]. Роликовый лоток для транспортирования стержневых деталей диаметром D и длиной L. Определить угол наклона к горизонту γ при массе ролика Gр и массе детали G. Коэффициент трения качения К = 0,01 см, трения скольжения f = 0,2. Рассчитать размеры роликов с радиусным и призматическим ручьями, шаг между ними, диаметр осей, радиус ручья и угол ручья (привести эскизы роликов с рассчитанными размерами).
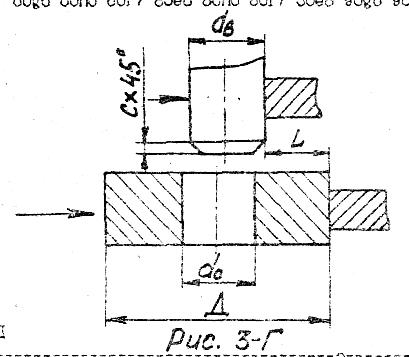
3 Определение условия сопряжения деталей при сборке В нижеперечисленных заданиях [5, С. 31 – 35; 10, С. 352 – 357]: а) проверить возможность сопряжения деталей типа валик и втулка; б) подсчитать требуемый размер фаски с; в) найти расстояние между опорами валика и втулки. Эксцентриситет е = 0,05 мм. Задание 3А.
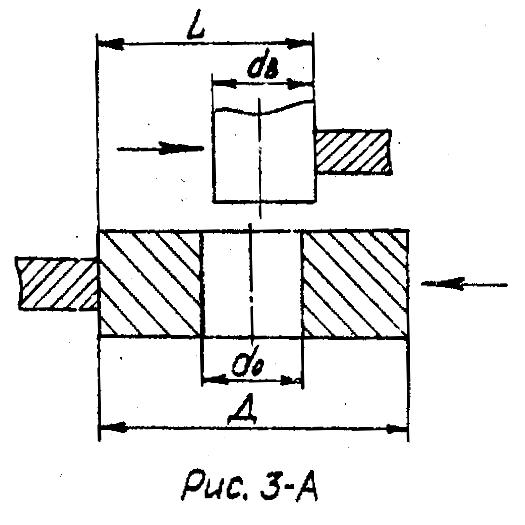 Задание 3Б.
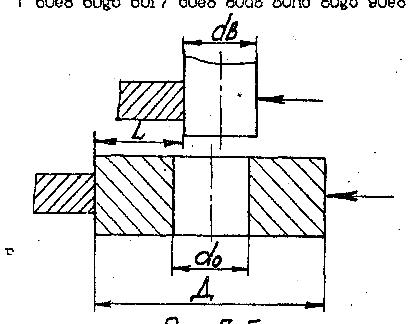 Рис. 3-Б Задание 3В.
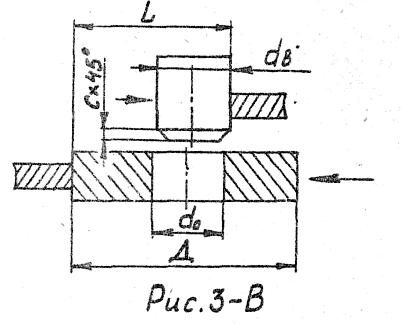 Задание 3Г.
 Задание 3Д.
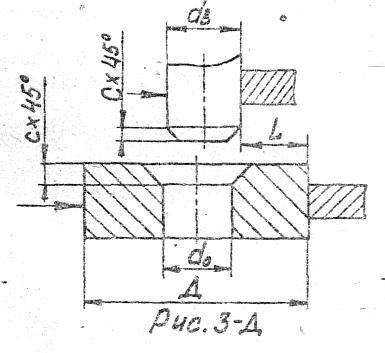 Таблица 4.1
4.3 Методические указания Контрольная работа предусматривает решение задач по базовым разделам дисциплины. Номер варианта задания выбирается из таблицы 4.1 по двум последним цифрам номера зачетной книжки. Контрольная работа должна включать титульный лист, задание (условия 3-х задач), содержание, основную часть, список используемой литературы. Основная часть должна включать: теоретические положения, относящиеся к решаемой задаче, результаты расчетов и выводы. В работе необходимо представить расчетные схемы и эскизы, рассчитываемых устройств. Работа оформляется на листах белой бумаги формата А4. 5 Основная и дополнительная литература Основная 1 Волчкевич Л.И. Автоматизация производственных процессов: Учебное пособие. – 2-е изд. – М.: Машиностроение, 2007. – 380 с. 2 Шишмарев В.Ю. Автоматизация производственных процессов в машиностроении. Учеб. для студ. ВУЗов. М.: ИЦ «Академия», 2007 г. – 365 с. 3 Капустин Н.М. Автоматизация машиностроения. Учеб. для ВУЗов. М.: Высш. шк., 2003 г. – 222 с. 4 Дудкин Е.В., Яковлев А.А. Автоматизация производственных процессов в машиностроении. – Ч1. Автоматизация ориентирования, загрузки и транспортирования изделий: Учеб. пособие / ВолгГТУ, Волгоград, 2004. – 89 с. 5 Дудкин Е.В., Рабинович Л.А., Яковлев А.А. Автоматизация производственных процессов в машиностроении. – Ч4. Автоматизация сборочных операций: Учеб. пособие / ВолгГТУ, Волгоград, 2003. – 76 с. Дополнительная 6 Схиртладзе А.Г. Автоматизация производственных процессов в машиностроении. Старый Оскол: ООО «ТНТ», 2008г. – 146 с. 7 Автоматизация, робототехника и гибкие производственные системы кузнечно-штамповочного производства. Учебник / К.И. Васильев, А.М. Смирнов, Е.И. Сосёнушкин, А.Г. Схиртладзе. – Изд. 2-е, перераб. и доп. – Старый Оскол: ООО «ТНТ», 2008г. – 484 с. 8 Технологические основы гибких производственных систем. Под ред. Ю.М. Соломенцева. Изд. 2-е, исправленное. М.: Высш. шк., 2000г. – 255 с. 9 Автоматическая загрузка технологических машин: Справочник/ Под ред. И.А. Клусова. – М.: Машиностроение, 1990. – 400 с. 10 Рабинович А.Н. Автоматизация механосборочного производства. – Киев: Вища школа, 1969. – 542 с. Перечень методических указаний 1 Отладка и исследование вибробункера с эллиптической траекторией движения рабочего органа: метод. указания / Сост. Кристаль М.Г., Маловечко А.К. – Волгоград, ВолГТУ. – 1994 г. – 18 с. 2 Определение производительности и оптимальных параметров бункерных загрузочных устройств с центральной вращающейся трубкой: метод. указания / Сост. Фрезинский Л.Л., Дудкин Е.В., Волгоград, ВолГПИ. 1992 г. – 12 с. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||