Документ Microsoft Word (2). 1 Асинхронная машина имеет статор и ротор
 Скачать 249.21 Kb. Скачать 249.21 Kb.
|

21) Генераторный режим[править | править вики-текст]Обычно синхронные генераторы выполняют с якорем, расположенным на статоре, для удобства отвода электрической энергии. Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря (0,3...2%), подвод постоянного тока к обмотке возбуждения с помощью двух контактных колец не вызывает особых затруднений. Принцип действия синхронного генератора основан на явлении электромагнитной индукции; при вращении ротора магнитный поток, создаваемый обмоткой возбуждения, сцепляется поочередно с каждой из фаз обмотки статора, индуцируя в них ЭДС. В наиболее распространенном случае применения трехфазной распределенной обмотки якоря в каждой из фаз, смещенных друг относительно друга на 120 градусов, индуцируется синусоидальная ЭДС. Соединяя фазы по стандартным схемам «треугольник» или «звезда», на выходе генератора получают трехфазное напряжение, являющееся общепринятым стандартом для магистральных электросетей. Частота индуцируемой ЭДС f\,\! [Гц] связана с частотой вращения ротора n\,\! [об/мин] соотношением: f = \frac{n \cdot p}{60}, где p\,\! — число пар полюсов ротора. Часто синхронные генераторы используют вместо коллекторных машин для генерации постоянного тока, подключая их обмотки якоря к трехфазным выпрямителям. Векторная диаграмма синхронного генератора. Векторную диаграмму строят в соответствии с уравнением (4.2). Если нагрузка генератора активно-индуктивная, то вектор тока статора I отстает по фазе на угол  15 Асинхронные двигатели краново - металлургической серии. Двигатели краново-металлургические серий MTF, MTKF, MTH и МТН Для привода крановых механизмов и механизмов, где характерны кратковременные и повторно-кратковременные режимы, а также большие кратности по перегрузке, применяются асинхронные двигатели специального назначения, называемые крановыми, выпускаемые серии MTF и MTKF. В приводах машин металлургического производства, а также в работах при температуре воздуха выше 40˚С, применяются металлургические АД серий МТН и МТКН. У двигателей с к.з. ротором (MTKF,МТКН) имеется повышенное скольжение. Все краново-металлургические двигатели отличаются большой перегрузочной способностью, высокими пусковыми моментами на фоне довольно низких пусковых токов, также имеют небольшое время разгона. Буквенно-цифровое обозначение типоразмера краново-металлургических двигателей: МТ 1. Обозначение серии; 2. Если стоит буква К, то двигатель с короткозамкнутым ротором, если нет этой буквы, то двигатель с фазным ротором; 3. Класс нагревостойкости изоляции: F – крановых двигателей, Н – металлургических; 4. Габарит – наружный диаметр статора (условная величина): 0-7 – для MTF и МТН, 0-5 – для MTKF и МТКН; 5. Порядковый номер серии 1; 6. Условная длина сердечника статора (1,2 или 3); 7. Количество полюсов 2p (6,8 или 10). Двигатели серий ΜΤF и МТКF имеют климатическое исполнение У, а двигатели серий МТН и МТКН изготовляются по климатическому исполнению У, ХЛ, Т, О и категории размещения 1 или 2. Допустимая температура воздуха: от -45 до +40˚С для МТF и МТКF, от -45 до +50˚С для МТН и МТКН. Чтобы посмотреть технические характеристики крановых двигателей серии MTF, Вы можете перейтиздесь. Найти технические данные крановых двигателей с короткозамкнутым ротором серии МТКF Вы можете посмотреть в разделе "Таблицы". Номинальный режим работы повторно-кратковременный, относительная продолжительность включения ПВ=40%. Чтобы найти технические данные асинхронных металлургических двигателей с короткозамкнутым ротором серии МТКН, перейдите в раздел "Таблицы". Продолжительность цикла tц=tр+ tп (tр – время работы, tп – время паузы) не должна быть выше 10 мин. Крановые и металлургические двигатели отличаются от остальных только обмоточными данными, видом изоляции и лакокрасочным покрытием. 19) Электромагнитный момент. В синхронных машинах большой и средней мощности потери мощности в обмотке якоря ΔРа эл = mIa2Ra малы по сравнению с электрической мощностью Р, отдаваемой (в генераторе) или потребляемой (в двигателе) обмоткой якоря. Следовательно, если пренебречь величиной ΔРа эл, то можно считать, что электромагнитная мощность машины Рэм = Р. Электромагнитный момент пропорционален мощности Рэм, поэтому для неявнополюсной и явнополюсной машин соответственно (3.35)
(3.36)
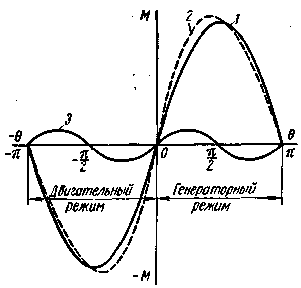
При неявнополюсной машине зависимость М = f(θ) представляет собой синусоиду, симметричную относительно осей координат (рис. 6.38, кривая 1). При явнополюсной машине из-за неодинаковой магнитной проводимости по различным осям (Хd ≠ Xq ) возникает реактивный момент (6.37)
Он появляется в результате стремления ротора ориентироваться по оси результирующего поля, что несколько искажает синусоидальную зависимость М = f(θ) (кривая 2). Реактивный момент возникает даже при отсутствии тока возбуждения (когда Е0 = 0); он пропорционален sin 2θ(кривая 3). Так как электромагнитная мощность Рэм пропорциональна моменту, то приведенные на рис. 6.38 характеристики в другом масштабе представляют собой зависимости Рэм = f (θ) или при принятом предположении (ΔРа эл = 0) — зависимости Р = f (θ). Кривые М = f (θ) и Рэм = f (θ)называют угловыми характеристиками. Физически полученная форма кривой М =f (θ) обусловлена тем, что потоки Фв и ΣФ сдвинуты между собой на тот же угол θ, на который сдвинуты векторы É0 и Ú (векторы Фв и ΣФ опережаютÉ0 и Ú на 90°). Поэтому если угол θ = 0 (холостой ход), то между ротором и статором существуют только силы притяжения f, направленные радиально (рис. 6.39, а),и электромагнитный момент равен нулю. При θ > 0 (генераторный режим) ось потока возбуждения Фв (полюсов ротора) под действием вращающего момента Мвн опережает ось суммарного потока ΣФ на угол θ (рис. 6.39, б), вследствие чего электромагнитные силы, возникающие между ротором и статором, образуют тангенциальные составляющие, которые создают электромагнитный тормозной момент М. Максимум момента соответствует значению θ = 90°, когда ось полюсов ротора расположена между осями «полюсов» суммарного потока ΣФ. При θ < 0 (двигательный режим) ось потока возбуждения под действием тормозного момента нагрузки Мвн отстает от оси суммарного потока (рис. 6.39, в), вследствие чего тангенциальные составляющие электромагнитных сил, возникающие между ротором и статором, создают электромагнитный вращающий момент М |